Известны аэродинамические весы, Y которых модель посредством державки крепится к подвижному столу, который обеспечивает свободу перемещения модели под действием измеряемого усилия и связан ссердечником индуктивного датчика, включенногов измерительную мостовую схему.
Отличительная особенность описываемых аэродинамических весов состоит в том, что стол опирается на .поплавок, полностью погруженный в жидкость.
АэродинаМИческие весы такой конструкции уменьшают влияние .поверхностного натяжения жидкости на результат измерений.
Кроме того, в описываемых аэродинамических весах, с целью обеспечения жестких связей в направлении неизмеряемых сил, поплавок соединяется тонкими нитями с грузом, подвешенным на таких же нитях к основанию весов. Причем длины нитей, связывающих груз с поплавком и основанием весов, одинаковы, а ось якоря индуктивного датчика расположена в плоскости, проходящей через точки подвеса груза, что исключает влияние наклона весов на их показания.
С целью уменьщения влияния составляющей от всплывной силы на показания весов вес груза выполняется равным удвоенно.й величине всплывной силы, плавающей системы весов.
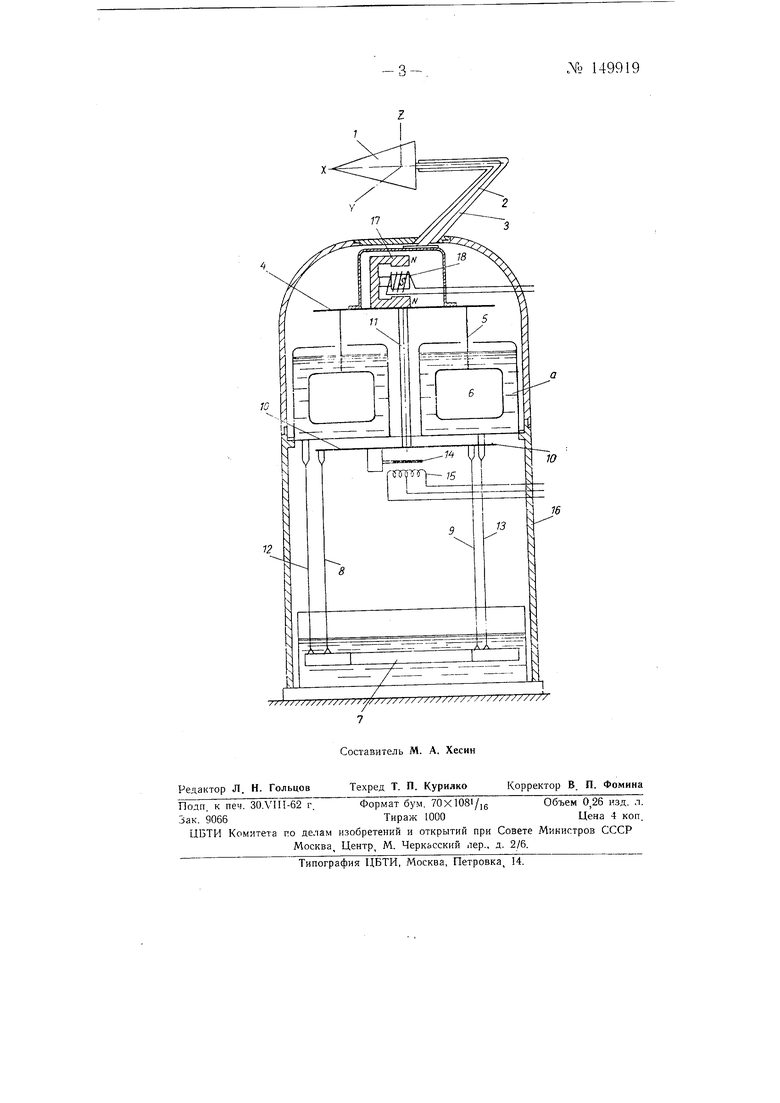
На чертеже схематически изображены описываемые аэродинамические весы.
Модель / устанавливается на Г-образной державке 2, заключенной в обтекатель 3.
Державка крепится на подвижном столе 4, который посредством трех трубчатых стоек 5 опирается на кольцеобразный поплавок 6, полностью погруженный в вакуумную жидкость а, что уменьшает влияние поверхностного натяжения жидкости на результаты измерения.
№ 149919-2Погружение поплавка в жидкость обеспечивается грузом 7, подвешенным на тонких Нитях 8 .и 9 к платформе 10, скрепленной с лодчижпым столом TpaBepcoji //. Одновременно груз посредством ннтсп 12 и 13 подвешивается к основанию весов (днищу сосуда). Нити выполнены одинаковой длины. Вес груза выбирается равным удвоенной величине всплывной силы плавающей системы весов, что обеспечивает одинаковое натяженне всех нитей. На платформе установлен якорь М индуктивного датчика. Ось якоря направлена вдоль оси X весов п расположена в плоскости точек подвеса груза к платформе и к основанию весов. Катушка J5 индуктивного датчика, выполненная в виде дифференциальной обмотки, -крепится к корпусу весов 16 и включена в два плеча измерительного моста (на чертеже не показан).
На подвижном столе весов крепится устройство, выполненное в виде магнитно-электрического возбудителя, состояш,его из установленного на подвижном столе постоянного магнита и катушки 18, скрепленной с корпусом весов. Катушка 18 включается на выход измерительного моста через усилитель и фазочувствительный детектор (на чертеже не показаны). Это устройство, укрепленное на подвижном столе весов автоматически уравновешивает аэродинамическую силу, вызвавшую перемеш,ение якоря в катушке индуктивного датчика, т. е. силу, действуюш;ую на модель. Нити 8, 9, 12 и 13, натянутые всплывной силой, обеспечивают жесткие связи в направлении неизмеряемых компонентов сил, действуюш их по оси Z весов, что исключает перемещение индуктивного датчика от сил, действующих вдоль оси Z, и .моментов, действующих в плоскостях ZX и ZY.
Описываемые трехкомлонентные аэродинамические весы могу найти применение, например, в вакуумных трубах для измерения относительно малых аэродинамических сил, действующих на модель в разряженных газах.
Предмет изобретения
1.Аэродинамические весы, в которых исследуемая модель, установленная на державке, крепится к подвижному столу, обеспечивающему свободу перемещения модели под действием измеряемого усилия и связанному с сердечником индуктивного датчика, включенного в измерительную мостовую схему, отличающиеся тем, что, с целью уменьщения влияния поверхностного натяжения на результат измерений, поплавок, на который опирается подвижный стол, полностью погружен в жидкость.
2.Устройство по ,п. I, отл и ч а юще е ся тем, что, с целью обеспечения жестких связей в направлении неизмеряемых сил, поплавок тонкими нитями связан с грузом, подвещенным на таких же нитях к основанию весов.
3.Устройство по П1П. 1 и 2, отличающееся тем, что, с целью исключения влияния наклона весов на их показания, длины нитей, связывающих груз с поплавком и основанием весов, одинаковы, а ось якоря индуктивного датчика расположена в плоскости, проходящей через точки подвеса груза « основанию весов и к поплавку.
4.Устройство по пп. 1-3, отличающееся тем, что, с целью уменьшения влияния составляющей подъемной силы на показания весов, вес груза равен удвоенной величине подъемной силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэродинамические весы | 1960 |
|
SU135271A1 |
| АЭРОДИНАМИЧЕСКИЕ ЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1967 |
|
SU205347A1 |
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| Тарировочный стенд | 1962 |
|
SU152115A1 |
| ПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1969 |
|
SU239601A1 |
| Способ кругового обдува моделей тел вращения | 1959 |
|
SU128308A1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| ЭЛЕКТРИЧЕСКИЕ ВЕСЫ ДЛЯ ИЗМЕРЕНИЯ | 1965 |
|
SU172081A1 |
| Вертикальный длинномер | 1982 |
|
SU1073556A1 |
| Дистанционный гидростатический нивелир | 1977 |
|
SU647524A1 |