Известные многокомпонентные аэродинамические магнитоэлектрические весы с обратной связью, содержащие основание с закрепленными на нем магнитами, подвиж:ую латформу с катушками силовозбудителей, со1-оя)Д;::: из двух независимых обмоток, ; усилит ..1, не всегда обеспечивают требуемую точность и:1мерения и сложны по конструкции, так как приходится уравновешивать каждую силу и каждый момент отдельными силовозбудителями, а пару от поперечных сил - уравновешивать дополнительными силовозбудктелями.
В предлагаемых весах с целью повышения точности измерения, упрош,ения конструкции ); совмещения осей координат весов с осями модели две независимые обмотки силовозбудителей, уравновешиваюш,ие силу и момент, соединены параллельно и включены на выход усилителей, а силовозбудители поперечных сил расположены по оси, перпендикулярной действию этих сил, и последовательно с одной из обмоток силовозбудителя включено постоянное сопротивление.
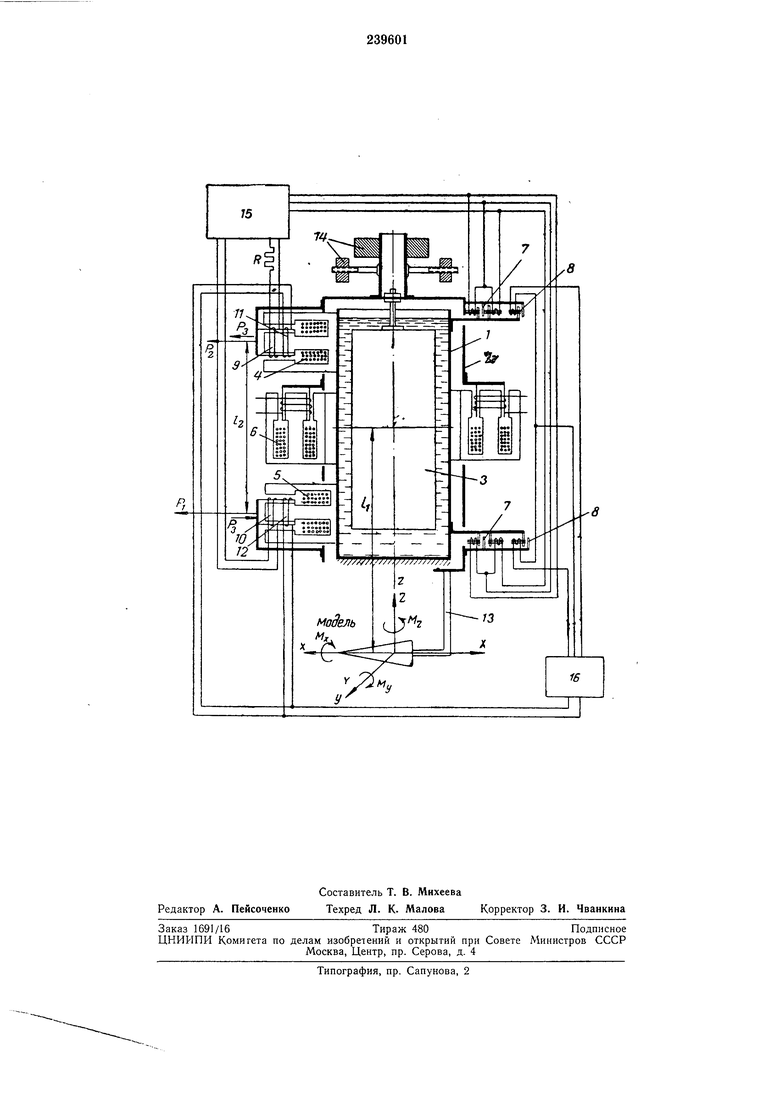
На чертеже показана схема измерения сил J и Z и момента MY предложенными весами. Измерение силы Y и моментов MX и производится аналогично, но силовозбудители и индуктивнь1е датчики этих компонент расположены в перпендикулярной плоскости.
Весы состоят из неподвижного основания 1. подвижной платформы 2 и поплавка 3, погруженного в жидкость. На основании весов располагаются электромагниты -6 силовозбуд телей, уравновешиваюших соответственно силу А, моменты Л1к, и силу Z, катушки индуктивных датчиков 7 1 8, подающих сигнал об изменении положения подвижной платформы относительно основания весов соответс венно в направлении действия силы X и -.о мента My .
На подвижной платформе весов закрепляк/гся катушки силовозбудителей с o6MOTKai;H 9-12, якоря индуктивных датчиков и державка весов 13 с исследуемой моделью.
Вес подвижной платформы с закрепленными на ней деталями и моделью уравновешивается силой поплавка 3. Совмещение центра тяжести подвижной платформы с центром ир:;ложения всплывной силы поплавка производится перемещающимися грузами 14.
Ири приложении к модели силы X на подвижную платформу действует сила А и пара ,Y/i, под действием которых подвижная платформа перемещается и вызывает разбаланс индуктивных датчиков 7. Разбаланс датчиков, усиленный усилителем 15, поступает в обмотки 9 и 10. Возникающая сила индукции уравновешивает действующую силу X.
Для уравновешивания нары /i последовательно с обмоткой 9 включается постоянное сопротивление R, уменьшающее ток в этой обмотке, а следовательно, н силу индукции.
Силы индукции в обмотках 9 к 10 можно представить как силу, равную Pi + 9 A, и пару (Pi-P2 k.
Подбором сопротивления R добиваются, чтобы пара ()l-y Xi. Подбор величины сопротивления R производится при наладке весов. Таким образом, располагая силовозбудители поперечных сил по оси, перпендикулярной действию этих сил, и включая последовательно с одной из обмоток постоянное сопротивление, удается одними и теми же силовозбудителями уравновешивать силу и пару этой силы на плече от заданного начала координат ресов до моыентной точки весов.
При действии на модель момента My подвижная платформа перемеш,ается и вызывает разбаланс индуктивных датчиков 8. Разбаланс датчиков, усиленный усилителем 16, посгупает в обмотки 11 и 12, намотанные на катушки силовозбудителей, уравновешивающих силу X. Возникающая сила индукции РЗ уравновещивает действующий момент Му.
Для того, чтобы силы индукции, уравновешивающие силу X и момент My ие влияли друг на друга, необходимо, чтобы магнитный поток в обмотках 9-12 не изменял магнитную индукцию в воздушном зазоре электромагнитов 4 и 5, уравновешивающих силу Л и момент тИк. Для этого ампервитки электромагнитов берутся такими, чтобы электромагниты
работали в зоне насыщения и при максимальных значениях токов в обмотках силовозбудителей не выходили из зоны насыщения. Этим условиям наиболее отвечают электромагниты с магнитопроводом из стали ЭП-58.
Таким образом, при работе электромагнитов силовозбудителей в зоне насыщения появляется возможность, намотав на катушку силовозбудителя две независимых обмотки, уравновещивать одними и теми же силовозбудителями два компонента - силу и момент, тем самым сократив их количество вдвое, в отличие от известных схем, где каждый компонент уравновещивается двумя независимыми силовозбудителями.
Предмет изобретения
Многокомпонентные аэродинамические магнитоэлектрические весы с обратной связью, содержащие основание с закренленными на нем магнитами, подвижную платформу с катущками силовозбудителей, состоящих из двух независимых обмоток, и усилители, отличающиеся тем, что, с целью повышения точности измерения, упрощения конструкции и совмещения осей координат весов с осями модели, две независимые обмотки силовозбудителей, уравновещивающие силу и момент, соединены параллельно и включены на выход усилителей, а силовозбудители поперечных сил расположены но оси, перпендикулярной действию этих сил, и последовательно с одной из обмоток силовозбудителя включено постоянное сопротивление.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКИЕ ЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1967 |
|
SU205347A1 |
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| Трехкомпонентные магнитно-электрические весы | 1961 |
|
SU142784A1 |
| МНОГОКОМПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1968 |
|
SU231160A1 |
| Аэродинамические весы | 1961 |
|
SU149919A1 |
| Устройство для измерения расхода жидких и газообразных сред | 1989 |
|
SU1620844A1 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| ЭЛЕКТРОМАГНИТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 1966 |
|
SU187346A1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1985 |
|
SU1303837A1 |