1
Изобретение относится к весоизмерительной технике и может быть использовано в аэродинамических весах для измерения малых сил и моментов.
Известно устройство для исследования аэродинамических сил и моментов, состоящее из нитяного подвеса, на котором подвешивают исследуемую модель, углы отклонения которой определяют с помощью оптической установки 1-3.
Это устройство может быть использовано лишь для определения аэродинамических характеристик осесимметричных тел в потоке разреженных газов.
Известны также аэродинамические весы с жидкостным подвижным подвесом, имеющим три степени свободы, состоящие из камеры с жидкостью и погруженны.м в нее поплавком с измерительной платформой, снабженной державкой и якорями индуктивных датчиков и магнитными силовозбудителями. Платформа соединена тонкими нитями с другой подвижной платформой и с корпусом весов. При воздействии измеряемых сил и моментов на модель через державку на индуктивных датчиках возникает сигнал, который через измерительный мост, усилитель и фазочувствительный детектор подается на катушки магнитных силовозбудителей 1.
Известные аэродинамические весы не обеспечивают необходимой точности и чувствительности при измерениях в вакууме.
Для обеспечения измерения в условиях вакуума с достаточной высокой чувствительностью в предлагаемых весах корпус подвещен на шарпире к неподвижной стойке весов, снабженных тремя вертикально установленными электромагнитами постоянного тока с сердечниками, выполненными в виде постоянных стержневых магнитов, и индуктивными датчиками системы подвеса измерительной платформы, якори которых установлены на измерительной платформе, а катушки - на корпусе, причем катущки электромагнитов укреплены в верхней части корпуса.
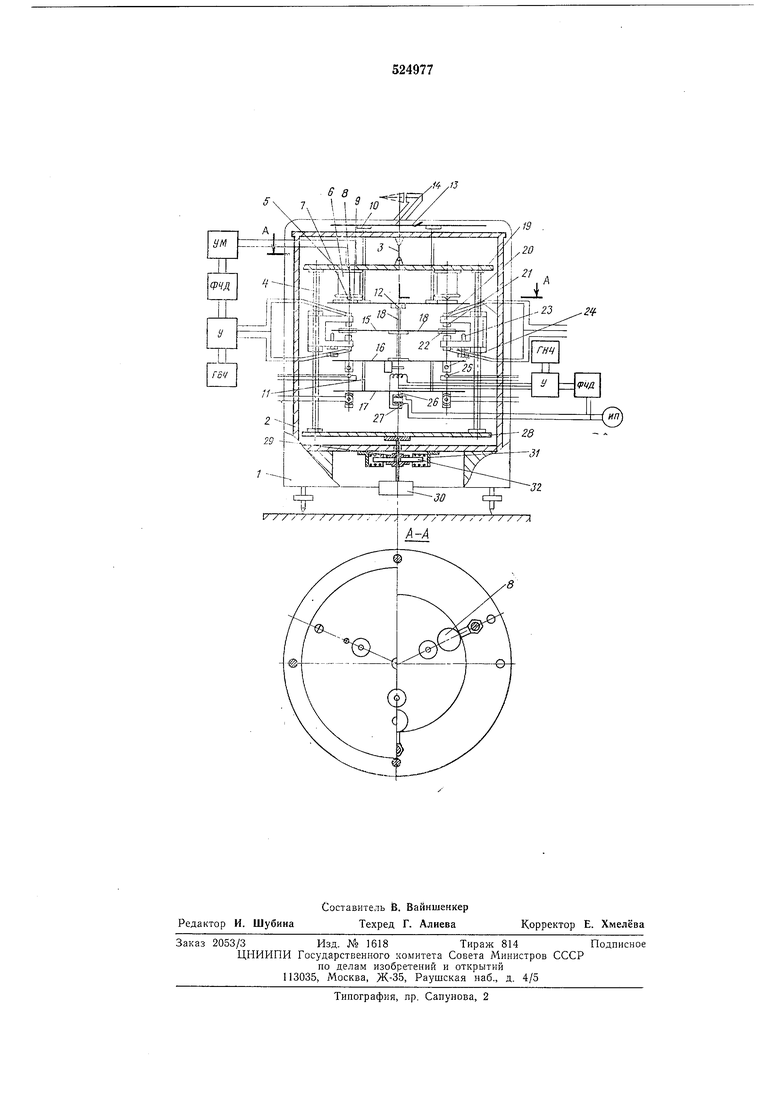
На чертеже изображены предложенные весы.
Трехкомпонентные магнитоэлектрические весы состоят из основания 1, на котором укреплена неподвижная стойка 2. К стойке 2 на щарнире 3 подвешен корпус 4 весов, на верхнем основании 5 которого установлены три электромагнита 6 постоянного тока с сердечпиками 7, выполненными в виде постоянных стержневых магнитов, якори 8 этих электромагнитов установлены под ними на диске 9, соединенном с помощью стоек 10, 11, 12 с диском 13 и установленной на не.м державкой
14, с диском 15 и диска.ми 16 и 17. Диски 9,
13, 15-17, соединенные между собой стойками 10, 11, 12, образуют подвижную измерительную платформу 18. На трех боковых стойках 19 корпуса 4 весов установлены кронштейны 20 с катушками 21 трех пар индуктивных датчиков системы подвеса измерительной платформы, образованной тремя замкнутыми электрическими цепями, в которые входят: индуктивные датчики, включенные в плечи мостов, генераторы высокой частоты (ГВЧ), усилители (У), фазочувствительные детекторы (ФЧД), усилители мощности (УМ), электромагниты 6. Якори 22 индуктивных датчиков установлены на диске 15. В кронштейнах 20 установлены арретиры 23. На диске 16 укреплены якори 24 индуктивных датчиков измерительной системы, катушки 25 которых установлены на корпусе весов. На диске 17 укреплены якори 26 магнитных силовозбудителей, катушки 27 которых смонтированы на корпусе весов. На нижнем основании 28 корпуса весов соосно с шарниром 3 укреплена тяга 29 с подвешенным на ней грузом 30. Подвешенный на шарнире корпус 4 и жестко соединенная с ним тяга 29 с грузом 30 образуют маятник. На основании 1 весов смонтированы катушки 31 электрического демпфера маятника, на тяге 29 которого укреплены постоянные магниты 32.
Весы работают следуюш,нм образом.
После включения системы подвеса подвижной измерительной платформы последняя переходит из заарретированного состояния на арретирах 23 в состояние левитации за счет того, что разность сигналов индуктивных датчиков, включенных в плечи мостов, возникаюшая вследствие разной величины зазоров между катушками 21 и якорями 22 каждой пары датчиков, подается через соответствуюший усилитель (У), фазочувствительный детектор (ФЧД), усилитель мош,ности (УМ) на соответствующий электромагнит 6. Якори 8 электромагнитов вместе с соединенным с ними диском 9 измерительной платформы под действием разности электромагнитной силы электромагнитов и их сердечников и сила тяжести измерительной подвижной платформы с укрепленными на ней деталями, перемешаются вертикально вверх. Это перемеш,ение происходит до тех пор, пока якори 22 индуктивных датчиков не будут равны. В этом нейтральном положении якорей разность сигналов этих датчиков равна нулю - вес измерительной платформы со всеми укрепленными на ней деталями уравновешен подъемной силой электромагнитов, равной сумме магнитной силы сердечников и электромагнитной силы электромагнитов (катушек с сердечниками), возникающей за счет предусмотренной в схеме подачи в обмотки электромагнитов калиброванной величины тока. При воздействии сил по вериткальной оси или .моментов вокруг горизонтальных осей на измерительную платформу через державку 14, с каждой пары индуктивных датчиков снимается разность сигналов, пропорциональная вертикальным перемещениям платформы от этих йозДействий. Эти разностные сигналы, снятые с мостов, усиленные и преобразованные, подаются на соответствуюшие электромагниты, компенсирующие эти воздействия и приводящие платформу в рабочее положение. Таким образом, платформа левитирует, не касаясь корпуса весов, имея три степени свободы. При воздействии измеряемых сил по горизонтальным осям
и момента вокруг вертикальной оси весов на державку 14, измерительная платформа смещается в поперечном направлении к вертикальной оси корпуса весов или разворачивается вокруг нее. Сигналы, пропорциональные
этим перемещениям, снятые с помощью индуктивных датчиков измерительной системы, включенных в плечи измерительных мостов, подаются через усилитель (У), фазочувствительный детектор (ФЧД) на катушки 27 магнитных возбудителей, укрепленных на корпусе весов. Система приходит в равновесие, когда якори 24 индуктивных датчиков занимают положение, при котором ток в катушках 27 магнитных силовозбудителей взаимодействует с
магнитным полем якорей силовозбудителей с силой, равной силе, действующей на державку 14, с обратным знаком. По величине тока в катушках магнитных силовозбудителей на измерительном приборе (ИП) можно судить
о величине действующей силы или момента. Подвес корпуса весов на шарнине 3 соосно с грузом 30 на тяге 29 позволяет исключить влияние на результаты измерения неточной установки или наклона основания 1 весов в
процессе работы.
Формула изобретения
Трехкомпонентные магнитоэлектрические
весы, содержащие корпус и подвижную измерительную платформу с державкой, электромагнитные измерительные системы, состоящие из индуктивных датчиков и магнитных силовозбудителей, отличающееся тем, что,
с целью измерения сил и моментов в условиях вакуума и повышения чувствительности, в них корпус подвешен на шарнире к неподвижной стойке весов, снабженных тремя вертикально установленными электромагнитами постоянного тока с сердечниками, выполненными в виде постоянных стержневых магнитов, и индуктивными датчиками системы подвеса измерительной платформы, якори которых установлены на измерительной платформе, а катушки-на корпусе, причем катушки электромагнитов укреплены в верхней части корпуса.
Источники информации, принятые во внимание при экспертизе:
1. Авт. св. 339823, кл. G 01М 9/00, 18.06. 1970.
2.Патент США ЛЬ 2935830, кл. 160-92, 18.06.59.
3.Авт. св. № 149919, кл. G 01М 9/00, 20.12. 1961.
/4 х-
19
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКИЕ ЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1967 |
|
SU205347A1 |
| Аэродинамические весы | 1961 |
|
SU149919A1 |
| ПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1969 |
|
SU239601A1 |
| Трехкомпонентные магнитно-электрические весы | 1961 |
|
SU142784A1 |
| Устройство для стабилизации магнитного подвеса ротора | 1990 |
|
SU1744313A1 |
| МНОГОКОМПОНЕНТНЫЕ АЭРОДИНАМИЧЕСКИЕ МАГНИТОЭЛЕКТРИЧЕСКИЕ ВЕСЫ | 1968 |
|
SU231160A1 |
| Аэродинамические весы | 1960 |
|
SU135271A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 1992 |
|
RU2112316C1 |
| ЭЛЕКТРОМАГНИТ | 1969 |
|
SU235208A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1982 |
|
SU1044980A2 |