/ 7j
jtiiillinl;
Р
СП
О 00 4
САЭ
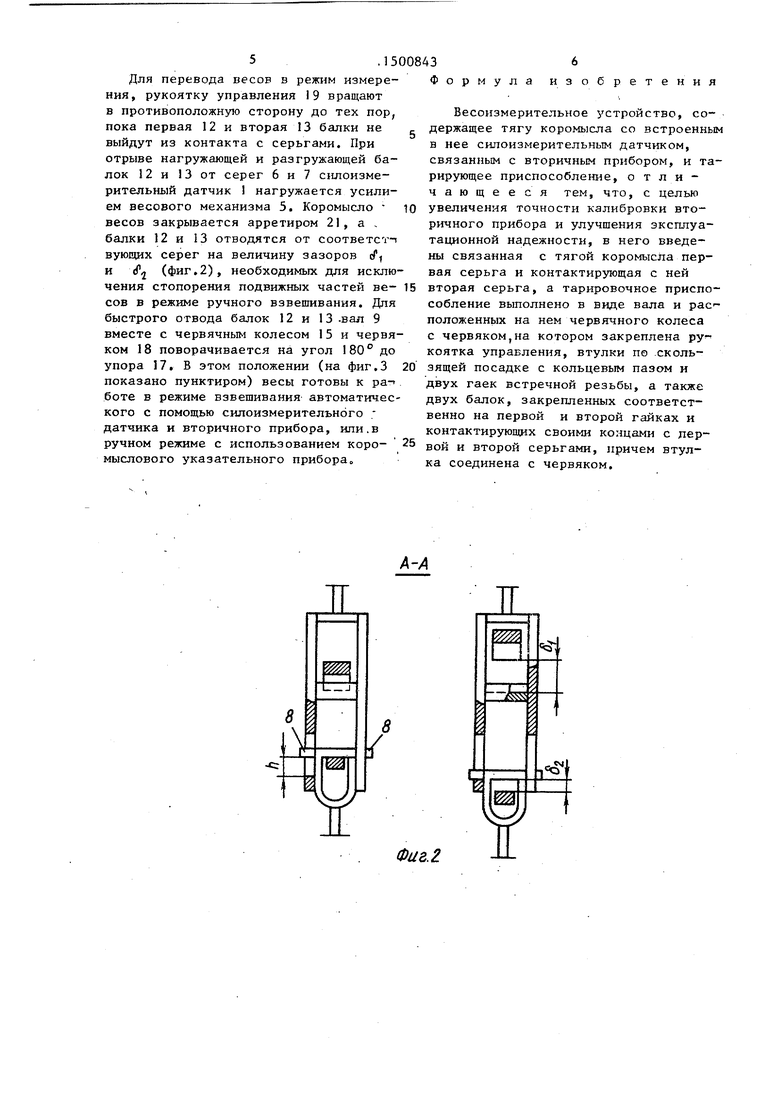
ровочного усилия, крромь сло устанавливают в горизонтальное положен ие до указателю 20. Для этого вал 9 поворачивают рукояткой управления I9 посредством червяка 18 и червячного колеса 15. При вращении вала 9 нагружающая балка 12 опускается, а разгружающая 13 поднимается, что еще более увеличивает зазор if в звена си лового размыкания, состоящего из друх серег 6 и 7о При измерении.рукоятку управления 19 вращшот в противоположную сторону до тех пор, пока первая и вторая балки 12 и 13 не/выйдут Из контакта с серьгами. При отрыве первой (нагружающей) 12 и второй (разгружающей) 13 балок от серег 6 и 7 силоизмерительный датчик 1 нагружается весовым механизмом 5. Коромысло весов закрывается арретиром 21, а балки 12 и 13 отводятся от соответствую- пщх серег на величину зазоров tf, и cf необходимых для исключения стопо- рения подвижных частей весов при ручном взвешивании. Для быстрого отвода балок 12 и 13 вал 9 вместе с червячным колесом 15 и червяком 18 поворачивается на угол 180 до упора 17. Весы при этом работают в автоматическом или ручном режиме 4 ил.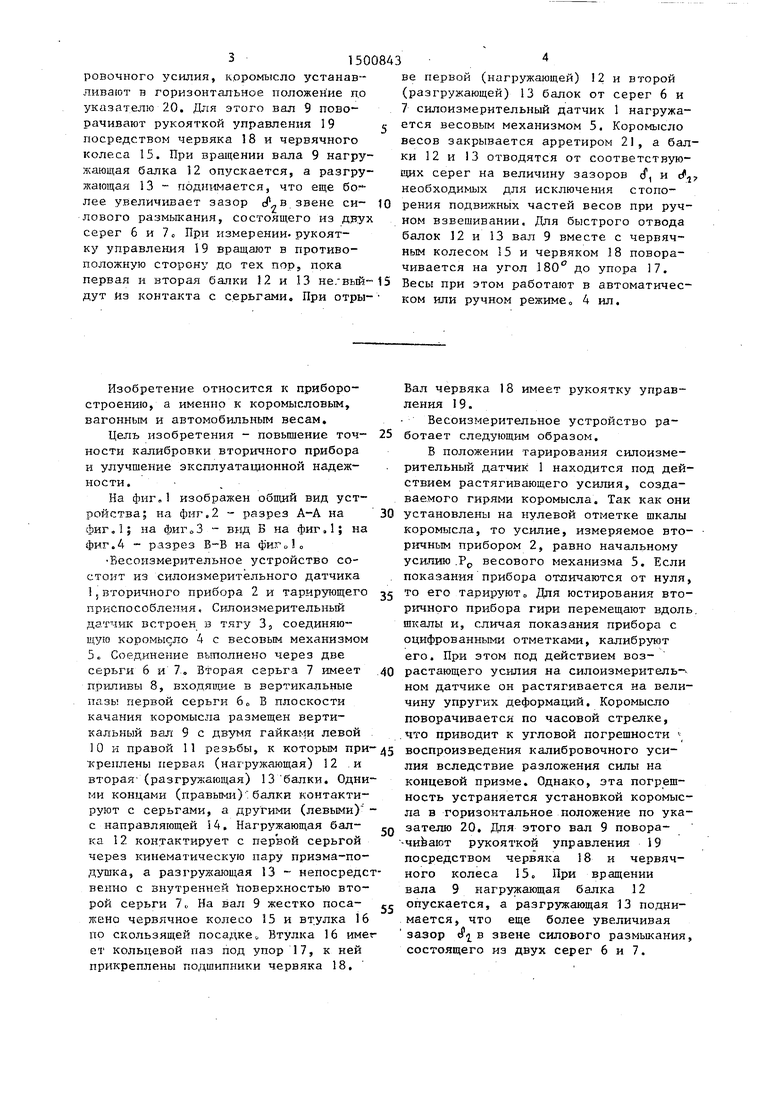
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1980 |
|
SU916997A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Весы для дискретного дозирования жидкого чугуна | 1973 |
|
SU480918A1 |
| Рычажные весы | 1976 |
|
SU581385A1 |
| Рычажные весы | 1979 |
|
SU815513A1 |
| РЕГИСТРИРУЮЩИЙ ПРИБОР К НЕРАВНОПЛЕЧИМ ВЕСАМ | 1933 |
|
SU37363A1 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ ТЕНЗОМЕТРИЧЕСКИХ БУНКЕРНЫХ ВЕСОВ | 1999 |
|
RU2171972C2 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ГАЗОВ В РАБОЧЕМ ПРОСТРАНСТВЕ ПЕЧЕЙ | 1941 |
|
SU67826A1 |
| Переключатель для двойных вагонных весов | 1931 |
|
SU52870A1 |
| ВОЗОВЫЕ ЦИФЕРБЛАТНЫЕ ВЕСЫ | 1929 |
|
SU22298A1 |
Изобретение относится к приборостроению, а именно к коромысловым, вагонным и автомобильным весам. Цель изобретения - повышение точности калибровки вторичного прибора и улучшение эксплуатационной надежности. В положении тарирования силоизмерительный датчик 1 находится под действием растягивающего усилия гирь коромысла. Когда они установлены на нулевой отметке шкалы коромысла, то усилие, измеряемое вторичным прибором 2, равно начальному усилию PO весового механизма 5. Если показания прибора отличаются от нуля, то его тарируют. Для юстирования вторичного прибора гири перемещают вдоль шкалы и калибруют его. При этом под действием усилия на силоизмерительном датчике 1 он растягивается на величину упругих деформаций. При повороте коромысла по часовой стрелке, при угловой погрешности воспроизведения калибровочного усилия, коромысло устанавливают в горизонтальное положение по указателю 20. Для этого вал 9 поворачивают рукояткой управления 19 посредством червяка 18 и червячного колеса 15. При вращении вала 9 нагружающая балка 12 опускается, а разгружающая 13 - поднимается, что еще более увеличивает зазор δ2 в звене силового размыкания, состоящего из двух серег 6 и 7. При измерении рукоятку управления 19 вращают в противоположную сторону до тех пор, пока первая и вторая балки 12 и 13 не выйдут из контакта с серьгами. При отрыве первой /нагружающей/ 12 и второй /разгружающей/ 13 балок от серег 6 и 7 силоизмерительный датчик 1 нагружается весовым механизмом 5. Коромысло весов закрывается арретиром 21, а балки 12 и 13 отводятся от соответствующих серег на величину зазоров δ1 и δ2, необходимых для исключения стопорения подвижных частей весов при ручном взвешивании. Для быстрого отвода балок 12 и 13 вал 9 вместе с червячным колесом 15 и червяком 18 поворачивается на угол 180° до упора 17. Весы при этом работают в автоматическом или ручном режиме. 4 ил.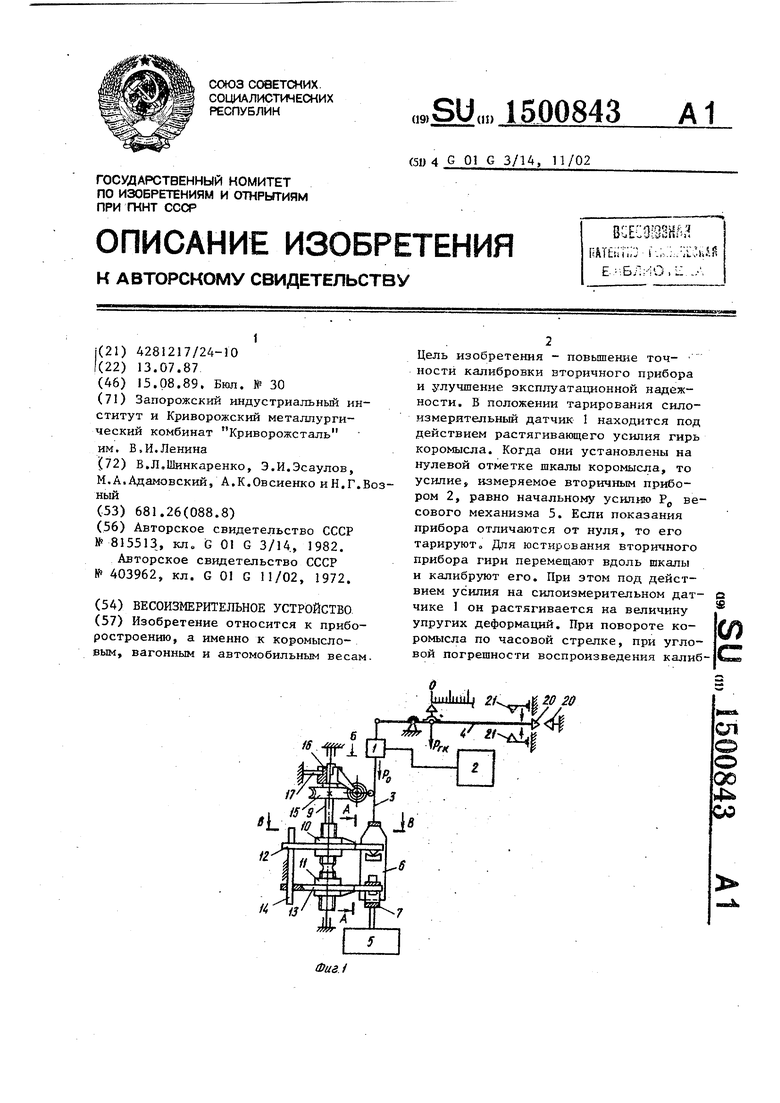
Изобретение относится к приборостроению, а именно к коромысловым, вагонным и автомобильным весам,
Цель изобретения - повышение точ- кости калибровки вторичного прибора и улучшение эксплуатационной надежности,
На фиг,1 изображен общий вид устройства; на фиг,2 - разрез А-А на фиг,1; на фиг о 3 вид Б на на фиг.4 - разрез В-В на
Весоизмерительное устройство состоит из силоизмерительного датчика 1,вторичного прибора 2 и тарирующего приспособления, Силоизмерительный датчик встроен в тягу 3, соединяющую коромысло 4 с весовым механизмом 5„ Соединение вьшолнено через две серьги 6 и 7.. Вторая серьга 7 имеет приливы 8, входящие в вертикальные пазы первой серьги 6о В плоскости качания коромысла размещен вертикальный вал 9 с двумя гайка.5и левой 10 к правой 11 резьбы, к которым при тсреплены первая (наг ружающая) 12 .и вторая- (разгружающая) 13 балки. Одними концами (правыми) балкй контактируют с серьгами, а другими (левыми) с направляющей i 4, Нагружающая бал
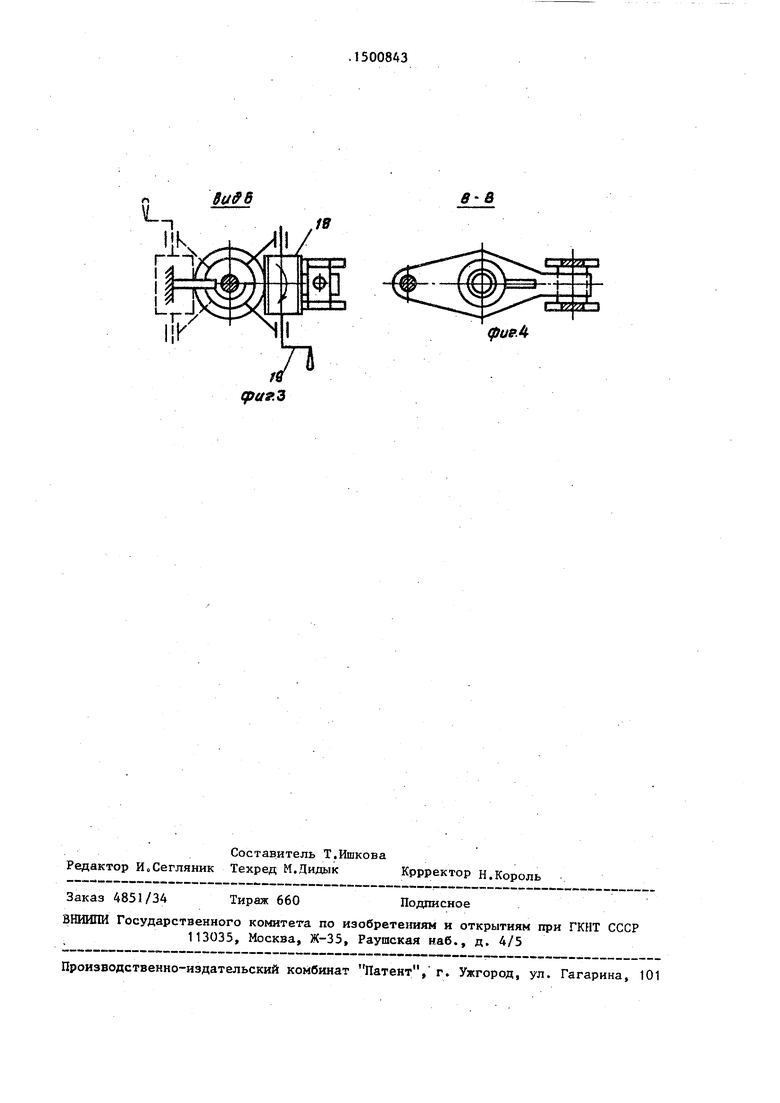
ка 12 контактирует с первой серьгой через кинематическую пару призма-подушка, а разгружающая 13 - непосредственно с внутренней поверхностью второй серьги 7i, На вал 9 жестко поса- жени червячное колесо 15 и вт.улка 16 по скользящей посадке„ Втулка 16 имег ет кольцевой паз под упор 17, к ней прикреп-пены подшипники червяка 18.
0
g 0 5
0
г
Вал червяка 18 имеет рукоятку управления 19.
Весоизмерительное устройство работает следующим образом,
В положении тарирования силоизмерительный датчик 1 находится под действием растягивающего усилия, создаваемого гирями коромысла. Так как они установлены на нулевой отметке шкалы коромысла, то усилие, измеряемое вторичным прибором 2, равно начальному уси-гшю .Рр весового механизма 5. Если показания прибора отличаются от нуля, то его тарируют Для юстирования вторичного прибора гири перемещают вдоль, шкалы и, сличая показания прибора с оцифрованными отметками, калибруют его. При этом под действием возрастающего усилия на силоизмеритель-- ном датчике он растягивается на величину упругих деформаций. Коромысло поворачивается по часовой стрелке,
.что приводит к угловой погрешности воспроизведения калибровочного усилия вследствие разложения силы на концевой призме. Однако, эта погрешность устраняется установкой коромысла в горизонтальное положение по указателю 20, Для этого вал 9 повора-чиЬают рукояткой управления 19 посредством червяка 18 и червячного колеса 15 При вращении вала 9 нагружающая балка 12 опускается, а разгружающая 13 поднимается. Что еще более увеличивая
зазор звене силового размыкания, состоящего из двух серег 6 и 7.
Для перевода весов в режим измерения, рукоятку управления 19 вращают в противоположную сторону до тех пор, пока первая 12 и вторая 13 балки не выйдут из контакта с серьгами. При отрыве нагружающей и разгружающей балок 12 и 13 от серег 6 и 7 силоизме- рительный датчик ) нагружается усилием весового механизма 5. Коромысло весов закрывается арретиром 21, а , балки 12 и 13 отводятся от соответст-i вующих серег на величину зазоров сГ и f (фиг,2), необходимых для исключения стопорения подвижных частей ве- сов в режиме ручного взвешивания. Для быстрого отвода балок 12 и 13 -вал 9 вместе с червячным колесом 15 и червяком 18 поворачивается на угол 180° до упора 17, В этом положении (на фиг.З показано пунктиром) весы готовы к ра- боте в режиме взвешивания автоматического с помощью силоизмерителъного ; датчика и вторичного прибора, или.в ручном режиме с использованием коро- мыслового указательного прибора
Формула изобретения
Весоизмерительное устройство, содержащее тягу коромысла со встроенным в нее силоизмерительным датчиком, связанньсм с вторичным прибором, и тарирующее приспособление, отличающееся тем, что, с целью увеличения точности калибровки вторичного прибора и улучшения эксплуатационной надежности, в него введены связанная с тягой коромысла первая серьга и контактирующая с ней вторая серьга, а тарировочное приспособление выполнено в виде вала и расположенных на нем червячного колеса с червяком,на котором закреплена ру- коятка управления, втулки по .скользящей посадке с кольцевым пазам и двух гаек встречной резьбы, а также двух балок, закрепленных соответственно на первой и второй гайках и контактирующих своими концами с дер- вой и второй серьгами, причем втулка соединена с червяком.
Фиг. 2
Ва96
в В
(риеЛ
| Рычажные весы | 1979 |
|
SU815513A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РЫЧАЖНЫЕ ВЕСЫ | 0 |
|
SU403962A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
