УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА
Заявлено 3 июля Ш61 г. за № 737805/26 в Комитет по делам изобретений и открытий при Совете Министров СССР
Опубликовано в «Бюллетене изобретений № 18 за 1962 г.
Известны устройства для автоматического регулирования работы землесосного снаряда, содержащие релейную схему с элементами логического действия и приводы землесоса и рабочих перемещений.
Предлагаемое устройство отличается тем, что оно позволяет производить экстремальное регулирование по двум параметрам. Для этого в нем в качестве измерительных элементов применены датчик кавитации и датчик заиления, соединенные с релейной схемой. Последняя обеспечивает последовательность изменения числа оборотов рабочего колеса землесоса и скорости рабочих перемещений землесосного снаряда.
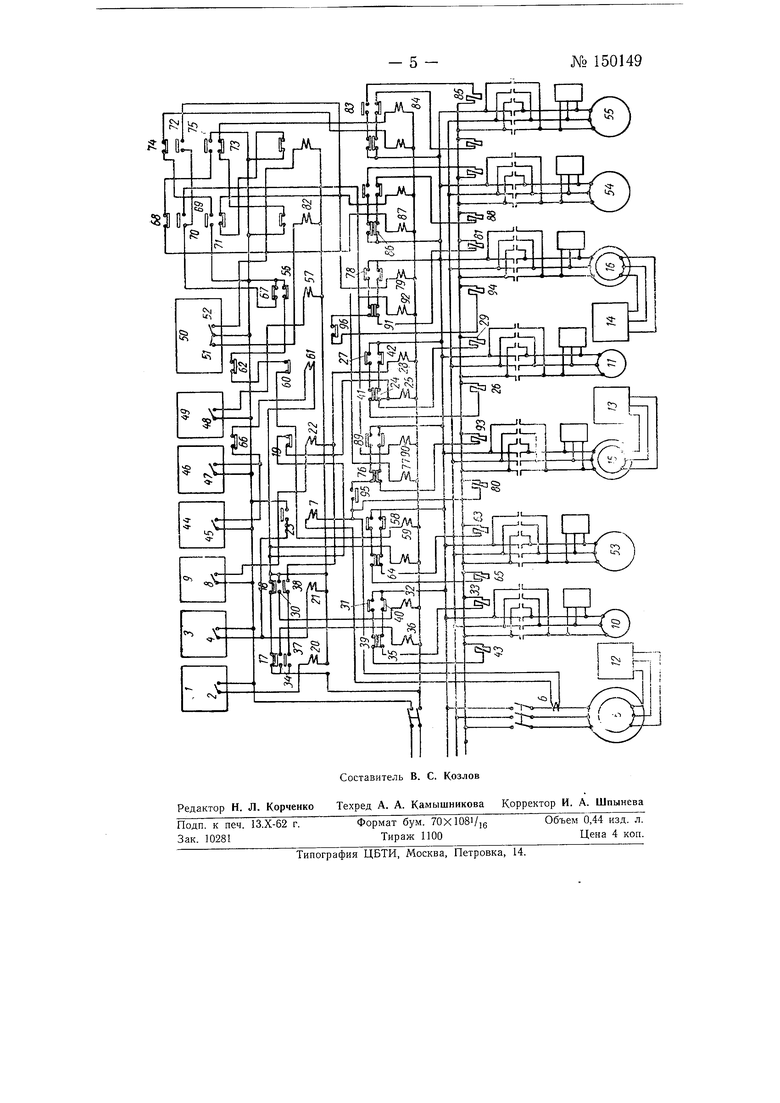
На чертеже приведена принципиальная схема описываемого устройства.
На участке напорного трубопровода в трубе заподлицо с ее стенками установлен датчик 17 начала заиления. Датчик 1 состоит из подогревной обмотки и термопары, защищенных от абразивного воздействия пульпы металлической пластинкой. В начале заиления слой грунта уменьшает отдачу тепла от подогревной обмотки потоку пульпы. Электронный автоматический потенциометр с регулирующим устройством позволяет обнаружить любые изменения температуры и при соответствующей установке регулятора замкнет контакт 2 датчика / начала заиления. При исчезновении слоя заиления этот контакт размыкается.
Во всасывающем патрубке землесоса установлен датчик 3 кавитации, выполненный из титаната бария и преобразующий механические колебания в электрические. Датчик / заиления и датчик 3 кавитации соединены с релейной схемой, обеспечивающей последовательность изменения числа оборотов рабочего колеса землесоса и скорости рабочих перемещений землесосного снаряда. При возникновении кавитации контакт 4 датчика 3 замыкается, а по окончании кавитации размыкается.
№ 150149- 2 -
Для защиты электродвигателя 5 землесоса от перегрузки могут быть использованы, например, трансформатор 6 тока и реле 7. Если скорость рабочих перемещений достаточно высока, а приемное устройство не успевает всосат4,разрыхленный грунт, то натяжение папильонажиых тросов уве.йичдвается. Степень натяжения их регулируют посредством динамометрйческого устройства, состоящего из трех роликов, один из KOTOpbixi.Ti pedjiemaeTCH относительно двух других. При натяжении папи льонаждого. троса, перекинутого через эти ролики, подвижный ролик сжимает прикрепленную к нему пружину и за.мьжает контакт 8 датчика 9.
В качестве исполнительных механизмов служат вспомогательные электродвигатели 10 и 11, дающие возможность изменять числа оборотов основных электродвигателей с помощью переменных сопротивлений 12, 13 и 14, вводимых в цепь роторов асинхронных электродвигателей 5, 15 и 16. Если при работе землесосного снаряда ртсутствуют заиление, кавитация, перегрузка, и сосун не пащет землю, контакты 2, 4 и 8 разомкнуты. Контакты 17, 18 и 19 соответственно реле 20, 21 и 22 замкнуты, а контакты 23 реле 7 - разомкнуты.
При замыкании контактов 24 реле 25 катушка 26 контактора оказывается под напряжением, электродвигатель // выводит сопротивления 13 и 14 из цепей роторов электродвигателей 15 и 16, в результате скорость папильонирования увеличивается и возрастает объемный вес пульпы. Увеличение последнего продолжается до тех пор, пока не срабатывает один из датчиков. Если сосун пашет грунт, т. е. ограничен грунтозабор, замыкается контакт 8; реле 22 разомкнется и прекратится увеличение скорос7:и. папильонирования. При замыкании контактов 27 реле 28 катущка 29 окажется под напряжением, а электродвигатель // будет вводить сопротивления 13 и 14 до тех пор, пока сосун не прекратит пахоты, т. е. скорость папильонирования не снизится до требуемой величины. При кавитации (или перегрузке) замкнутся контакт 4 (или реле 7), контакты 30 реле 21 и контакты 31 реле 32. Катущка 33 окажется под напряжением, электродвигатель 10 будет вводить сопротивление 12 и уменьшать обороты электродвигателя 5 до тех пор, пока не разомкнется контакт 4 (или реле 7). Если разомкнуты контакты 18 реле 21, скорость папильонирования сохраняется неизменной.
При заилении трубопровода зам.кнутся контакты 2 датчика 1, контакты 34 реле 20 и контакты 35 реле 36. Обороты землесоса будут увеличиваться до исчезновения заиления. При одновременном заилении и кавитации замыкаются контакты 2 и-4 датчиков 1 и 3 (или контакты 2 датчика / и контакты 23 реле 7), а также контакты 37, 38 и 27, вследствие чего скорость напильонирования начнет уменьщаться (уменьщается консистенция).
Разомкнутые контакты /7 и 18 блокируют увеличение скорости папильонирования, а разомкнутые контакты 39 и 40 сохраняют постоянными обороты землесоса. Одновременное срабатывание двух датчиков свидетельствует о достижении экстремума, и работа предлагаемого устройства будет протекать вблизи экстремума или при предельно возможном грунтозаборе. Кнопки ручного управления могут быть подключены последовательно с контактами 39, 40, 41, 42 и параллельно контактам 24, 27. 3.1 и 35.
Для выведения на панель управления световой сигнализации о работе устройства могут быть использованы блок-контакты контакторов и дополнительные контакты реле. Чтобы вспомогательные электродвигатели 10 и // не могли повредить подвижные части сопротивлений 12.
13 и 14 в крайних полол ениях могут быть установлены конечные выключатели, которые разрывают цепи катушек 26, 29, 33 и 43 контактоДатчик 44 опасного заиления труб (при обрушении забоя) по KOHJ струкции аналогичен датчику 1 и размещеп рядом с ним на боковой стенке трубопровода. При слое заиления, покрывающем этот датчик, замыкается контакт 45. Датчик 46 быстрого изменения вакуума состоит из двух камер, одна из которых соединена с всасываюш,им патрубком землесоса. Между собой камеры соединены каналом с малым регулируемым отверстием. При возникновении опасного перепада замыкается контакт 4/, размыкающийся при поднятии сосуна в момент выхода его из завала.
По достижении заданной глубины регулирующее устройство замыкает контакт 48 датчика 49 глубины. Датчик 50 поворота землесосного снаряда в забое, в качестве которого может быть использован, например, кОрабельный магнитный компас, сконструирован так, что по достижении всасывающим устройством левого края забоя замыкается контакт 5/, а правого - контакт 52. В качестве исполнительных механизмов служат электродвигатели: 53-подъема и опускания сосуна, 15 и 16 - правого и левого папильонирования, 54 и 55 подъема и опускания свай.
Если опасного заиления и быстрого увеличения вакуума нет, а одна из свай опущена на грунт, то всасывающее устройство начнет опускаться до заданной глубины, так как замкнуты контакты 56 реле 57, контакты 58 реле 59, контакты 60 реле 61 и контакты 62 конечного выключателя зависания сосуна. При этом катущка 63 находится под напряжением и работает электродвигатель 53.
При опасном заилении или быстром увеличении вакуума замкнутся контакты 45 или контакты 47 и 64, на катущку 65 поступает напряжение и сосун начнет подниматься для про.мывки. При размыкании контактов 45 и 47 сосун вновь начнет опускаться. Если промывка затяну.лась, контакты 66 конечного выключения сосуна у поверхности воды прекратят подъем сосуна в нескольких метрах от поверхности воды с тем, чтобы не сорвать вакуума. Реле 61 служит для обеспечения первоочередной промывки сосуна. Когда сосун достигнет заданной глубины, разомкнутся контакты 56 реле 57, и сосун прекратит опускание. Контакты 67 реле 57 замкнутся и начнется папильонаж в сторону опущенной сваи.
Например, опущена левая и поднята правая сваи. При этом контакты 6 и 69 конечных выключателей замкнуты, а их контакты 70 и 71 разомкнуты; контакты 72 и 73 замкнуты, а контакты 74 и 75 разомкнуты. Кроме того, замкнуты контакты 76 реле 77 и контакты 78 реле 79. Катушки 80 и 81 находятся под напрял ением. Электродвигатель 15 наматывает трос левой папильонажной лебедки, а электродвигатель 16 разматывает трос правой папильонажной лебедки. Папильонирование в левую сторону будетпродолжаться до тех пор, пока всасывающее устройство не достигнет левого края забоя. В результате замкнутся контакты 5/, реле 82, контакты 83 реле 84 и на катушку 55 поступит напряжение; правая свая начнет опускаться.
При отходе правой сваи от верхнего положения разомкнутся контакты 72 конечного выключателя, и налильонаж прекратится. Когда правая свая ляжет на грунт, разомкнутся контакты 75 и прекратится разматывание троса для опускания сваи. Замкнутся контакты 75 .конечного выключателя, контакты 86 реле 87, на катушку 88 поступит напряжение и начнется подъем левой сваи.
При подъеме левой сваи до верхнего положения ра;юмкнутся контакты 68 конечного выключателя, трос для подъема левой сваи остано 3 -А 150149
№ 150149- 4 -
вится. Замкнутся контакты 70 конечного выключателя, контакты 89 реле 90 и контакты 91 реле 92. Катушки 93 и 94 окажутся под напряжением. Электродвигатель /5 начнет разматывать трос левой папильонажч ной лебедки, а электродвигатель 16 - наматывать трос правой напильонажной лебедки. Причем папильонаж в правую сторону бздет продолжаться до тех пор, пока всасывающее устройство не достигнет правого края забоя. Папильонирование прекратится, начнется смена свай. Затем процесс повторяется. При аварийном натяжении папильонажных тросов динамометрические датчики 95 и 96 отключают папильонажные лебедки.
Предмет изобретения
Устройство для автоматического регулирования работы землесосного снаряда, содержандее плавучий землесосный снаряд, релейную схему с элементами логического действия и приводы землесоса и рабочих пе-. ремещений, отличающееся тем, что, с целью экстремального регулирования по двум параметра.м, в нем в качестве измерительных элементов применены датчик кавитации и датчик заиления, соединенные с релейной схемой, обеспечивающей последовательность изменений числа оборотов рабочего колеса землесоса и скорости рабочих перемещений землесосного снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1955 |
|
SU108718A1 |
| Землесос | 1940 |
|
SU59561A1 |
| УСТРОЙСТВО ДЛЯ БЕЗЪЯКОРНОГО ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011757C1 |
| Землесосный снаряд | 1985 |
|
SU1416616A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗЕМЛЕСОСНОГО СНАРЯДА | 1969 |
|
SU250750A1 |
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| СОСУН ЗЕМЛЕСОСА С ФРЕЗЕРНЫМ РАЗРЫХЛЕНИЕМ | 1949 |
|
SU79043A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Устройство для автоматического управления землесосным снарядом с дизель-электрическим приводом по системе генератор-двигатель | 1958 |
|
SU119483A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |