1
(21)4363217/25-28
(22)12.01.88
(46) 30.08.89. Бюл. 32
(72) Е.В.Буянов
(53) 620.1.05:531.24(088.8)
(56) Авторское свидетельство СССР
№ 1262318, кл. G 01 М 1/10, 1984.
(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ (57) Изобретение относится к машиностроению и может быть использовано для определения тензора инерции различных изделий. Цель изобретения - повышение производительности и том
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения тензора моментов инерции изделия | 1982 |
|
SU1078266A1 |
| Устройство для определения тензора инерции | 1984 |
|
SU1262318A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436055C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| Устройство для определения тензора инерции изделия | 1983 |
|
SU1120194A1 |

Изобретение относится к машиностроению и может быть использовано для определения тензора инерции различных изделий. Цель изобретения - повышение производительности и точности путем обеспечения возможности изменения положения изделия относительно устройства без переустановки и за счет исключения влияния массы и жесткости узла крепления изделия на результат измерения. Устройство для определения тензора инерции содержит бифилярный подвес 2 с узлом крепления изделия 7 в виде рамки 3, трех штанг 4 с захватами 6, которые могут перемещаться вдоль продольной оси штанг. Каждая из штанг закреплена на рамке 3 с возможностью поворота вокруг двух осей ортогональных друг другу и продольной оси штанги. Центры масс рамки 3 и штанг 4 совмещены с точкой, являющейся геометрическим центром рамки 3, оси поворота рамки и штанг также проходят через эту точку. Захваты 6 закреплены на штангах посредством сферических шарниров, причем тензор инерции каждого из захватов имеет форму сферы, центр которой совмещен с центром шарнира. Устройство снабжено эталоном в виде цилиндра с рычагами, предназначенными для взаимодействия с захватами 6. 2 з.п. ф-лы. 2 ил.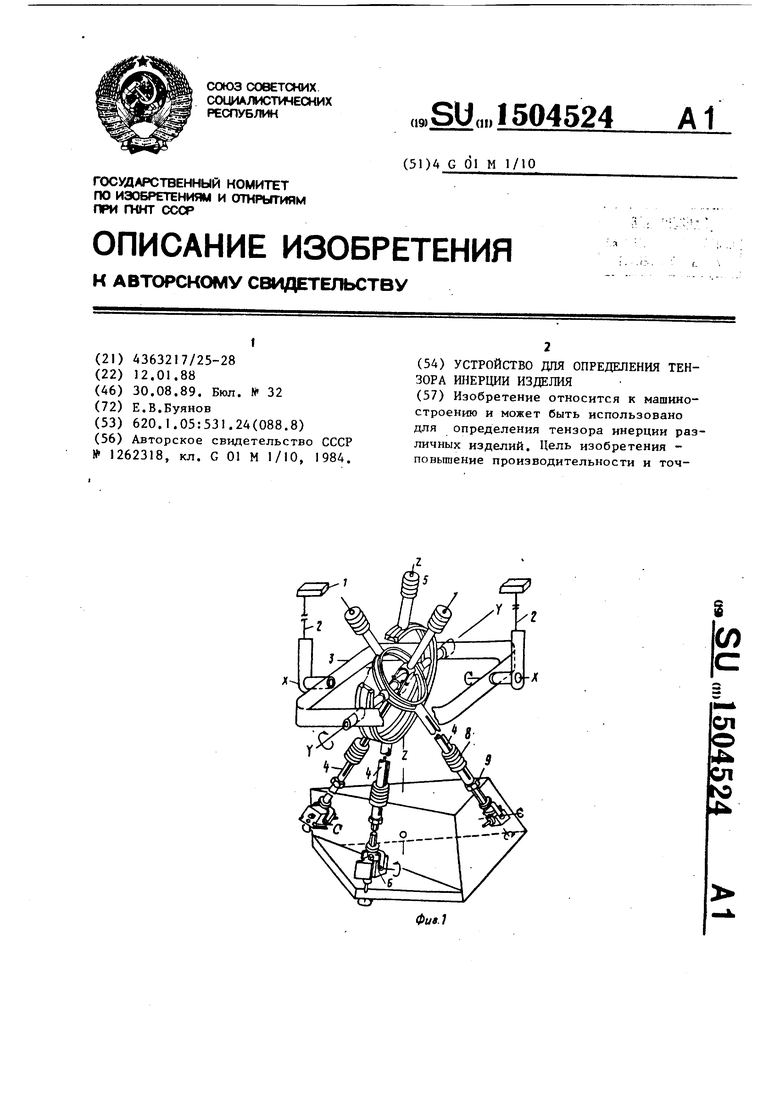
(/)
3150
ности путем обеспечения возможности изменения положения изделия относительно устройства без переустановки и за счет исключения влияния массы и жесткости узла крепления изделия на результат измерения. Устройство для определения тензора инерции содержит бифилярный подвес 2 с узлом крепления изделия 7 в виде рамки 3, трех штанг 4 с захватами 6, которые могут перемещаться вдоль продольной оси штанг. Каждая из штанг закреплена на рамке 3 с. возможностью поворота вокруг двух осей ортогональных
Изобретение относится к машино- строению и может использоваться для определения тензора инерции различны изделий.
Цель изобретения - повьш1ение производительности и точности за счет обеспечения возможности изменения положения изделия относительно устройства без его переустановки и за счет исключения влияния массы и жесткости узла крепления изделия на ре зультат измерения.
На фиг, 1 изображено устройство для определения тензора инерции изделия; на фиг. 2 - узел устройства, являющийся эталоном.
Устройство для определения тензора инерции изделия содержит основани 1, закрепленный на основании бифилярный подвес 2 и закрепленную на последнем с возможностью поворота вокруг оси XX, параллельной основанию, рамку 3. На рамке 3 закреплены три штанги 4 таким образом, чтобы каждая могла поворачиваться вокруг двух осей, ортогональных друг другу и продольной оси штанги. Оси поворота рамки и штанг пересекаются в одно точке, совмещенной с геометрическим центром рамки 3, с этой же точкой совмещены и центры масс рамки 3 и штанг 4, Каждая из штанг 4 снабжена противовесом 5 для регулировки положения ее центра масс и захватом 6 для крепления изделия 7, Каждый из захватов 6 saKpertJieH на штанге 4 с возможностью перемещения и фиксации вдоль ее продольной оси посредством сферического шарнира и выполнен так чтобы его тензор инерции имел форму
друг другу и продольной оси штанги. Центры масс рамки 3 и штанг 4 совмещены с точкой, являющейся геометрическим центром рамки, оси поворота рамки и гатанг также проходят через эту точку. Захваты 6 закреплены на штангах посредством сферических шарниров, причем тензор инерции каждого из захватов имеет форму сферы, центр которой совмеш,ен с центром шарнира. Устройство снабжено эталоном в виде цилиндра с рычагами, предназначенными для взаимодействия с захватами 6, 2 з.п. ф-лы, 2 ил.
0
5 0
с
О
S
0
5
сферы, центр которой совмещен с центром шарнира. Для компенсации перемещения центра масс штанги 4 из-за перемещения вдоль ее продольной оси захвата 6 каждая из штанг снабжена противовесом 8. Противовес 8 перемещается посредством гайки 9 одновременно с захватом бив противоположном его движению направлении.
Устройство я определения тензора инерции изделия снабжено эталоном, вьшолненным в виде цилиндра 10, На котором закреплены неподвижный рычаг 11 и два подвижных рычага 12 и 13, уравновешенные относительно оси цилиндра 10. На каждом рычаге выполнен Т-образный паз 14 с винтом 15, предназначенный для взаимодействия с захватами 6, Диск 16 прикрепляется при необходимости к торцу цилиндра 10 для изменения его момента инерции. Плавный поворот рычагов 12 и 13 вокруг оси цилиндра 10 осуществляется червячной передачей 17,
Устройство для определения тензора инерции изделия 7 работает следующим образом.
Вращением гайки 9 штанги 4 осуществляется перемещение захвата 6 на требуемую величину, необходимую для установки изделия 7. Одновременно вращение гайки 9 вызывает движение противовеса В в направлении, обратном направлению движения захвата 6, что обеспечивает неподвижность положения центра масс штанги 4. Далее штанги 4 поворачивают в положение, при котором изделие 7 прикрепляется к захва-1 там 6 в требуемом положении. После прикрепления изделия 7 оно повисает
на штангах А, которые образуют вместе с ним жесткую конструкцию, свободно поворачивающуюся вокруг осей XX и УУ, а центр масс О изделия 7 совпадает с вертикальной осью ZZ, проходящей через геометрический центр рамки 3, т.е. изделие 7 самоцентрируется в поле силы тяжести.
Сообщая системе рамка 3 - штанги 4 - изделие 7 колебательное движение, измеряют его параметры одним из известных способов. По периоду колебаний бифиляра с учетом геометрических и массовых параметров устройства определяют момент инерции изделия 7. Изменяя положение изделия 7 вращением гаек 9, определяют момент инерции изделия 7 относительно другой оси. В результате нескольких измерений определяется тензор инерции изделия 7.
Определение момента инерции штанг устройства вместе с рамкой, необходимого для вычисления момента инерции изделия 7, осуществляют посредством эталона. Для этого рычаги 12 и 13 эталона устанавливают таким образом, чтобы положение штанг 4 и захватов 6 после прикрепления к ним эталона соответствовало бы их положению с закрепленным изделием. Для Прикрепления эталона захваты 6 вводятся в пазы 14 рычагов 11-13 и винтами 15 перемещаются в необходимые положения. Положения щтанг 4 контролируются, например, угломером. Формула изобретения
нование, закрепленный на нем бифи- лярный подвес и узел крепления нзде- лия, отличающееся тем, что, с целью повьппения производительности и точности, уэел крепления изделия выполнен в виде рамки, закрепленной на бифилярном подвесе с возможностью поворота вокруг: оси, параллельной основанию, трех щтанг, каждая из которых закреплена на рамке с возможностью поворота вокруг двух осей, ортогональных друг другу и продольной оси штанги, и трех захватов, каждый из которых посредством сферического шарнира закреплен на одной из штанг с возможностью перемещения и фиксации вдоль ее продольной оси.
и размещенных на нем трех уравновешенных относительно оси цилиндра рычагов, два из которых размещены с возможностью перемещения и поворота относительно оси цилиндра.
f6
/
Фиг. 2
