теми же токами возбуждения соответственно в якорной обмотке 8 машины 3 и якорной обмотке машины 4 вычитаются, образуя сопряженньш вектор ЭДС, взаимодействующий с напряжением энергосистемы 2. При таком соединении якорных обмоток синхронных машин 3 и 4 устройство в целом эквивалентно двум асинхронизирован- ным синхронным машинам (АСМ). При этом первая эквивалентная АСМ работает в асинхронизированном синхронном режиме, устойчива по скольже- н-ию и обеспечивает поддержание напряжения по сигналу от датчика 19. Так как при этом ЭДС второй эквива0
5
лентной АСМ формируется как сопря- - женньй вектор первой АСМ, то она устойчива по углу между векторами ЭДС и напряжением сети второй АСМ. Частота вращения ротора равна полусумме частот связываемых энергосистем. При этом векторы ЭДС эквивалентных АСМ являются сопряженными векторами, поэтому одна из эквивалентных АСМ будет работать двигателем, другая - генератором, обеспечивая тем самым заданный переток мощности через устройство и нормальное его функдионирова1П1е как устройства для объединения энергосистем. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1686595A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для объединения энергосистем | 1976 |
|
SU574818A1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
Изобретение относится к электротехнике. Цель изобретения - упрощение устройства для объединения энергосистем. При соединении конца якорной обмотки 7 и начала якорной обмотки 8 синхронной машины 3 с началом якорной обмотки синхронной машины 4 ЭДС, наводимые токами возбуждения обмоток возбуждения соответственно в якорной обмотке 7 машины 3 и якорной обмотке машины 4, суммируются, образуя прямой вектор ЭДС, взаимодействующий с напряжением энергосистемы 1, а ЭДС, наводимые теми же токами возбуждения соответственно в якорной обмотке 8 машины 3 и якорной обмотке машины 4, вычитаются, образуя сопряженный вектор ЭДС, взаимодействующий с напряжением энергосистемы 2. При таком соединении якорных обмоток синхронных машин 3 и 4 устройство в целом эквивалентно двум асинхронизированным синхронным машинам /АСМ/. При этом первая эквивалентная АСМ работает в асинхронизированном синхронном режиме, устойчива по скольжению и обеспечивает поддержание напряжения по сигналу от датчика 19. Так как при этом ЭДС второй эквивалентной АСМ формируется как сопряженный вектор первой АСМ, то она устойчива по углу между векторами ЭДС и напряжением сети второй АСМ. Частота вращения ротора равна полусумме частот связываемых энергосистем. При этом векторы ЭДС эквивалентных АСМ являются сопряженными векторами, поэтому одна из эквивалентных АСМ будет работать двигателем, другая - генератором, обеспечивая тем самым заданный переток мощности через предлагаемое устройство и нормальное его функционирование как устройства для объединения энергосистем. 4 ил.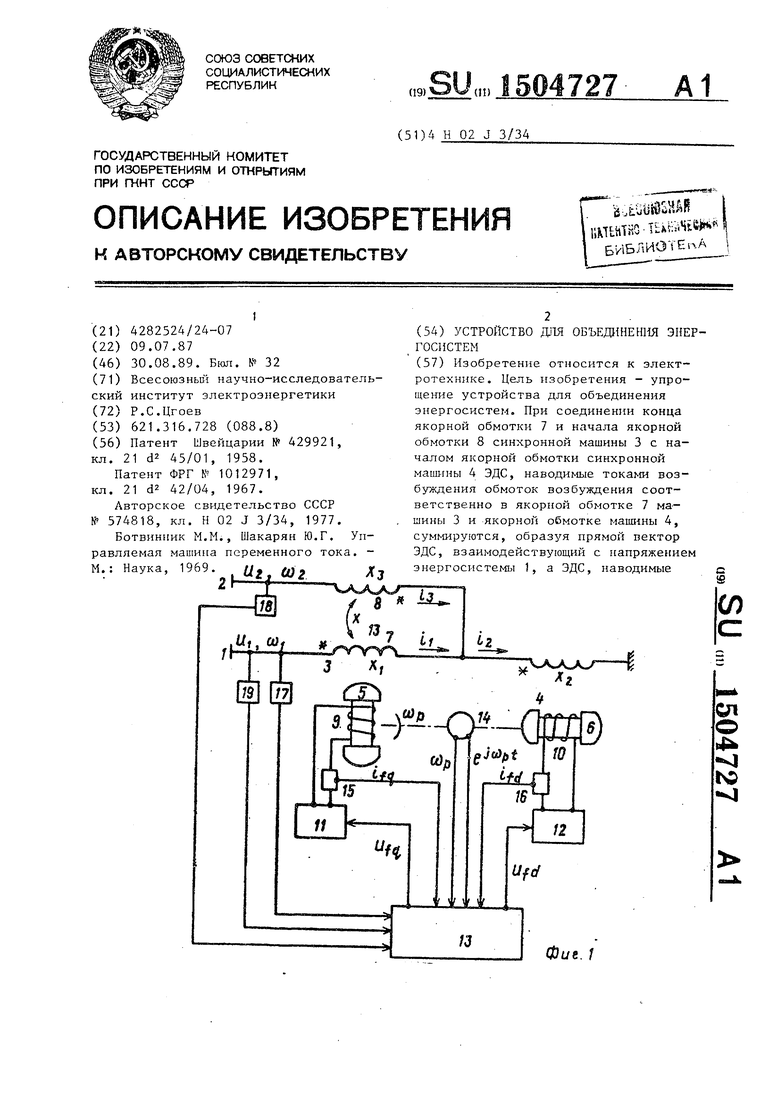
Изобретение относится к электротехнике, а именно к устройствам для объединения гибкими связями энергосистем, обеспечивающим возможность их параллельной работы при различных частотах.
Цель изобретения - упрощение устройства для объединения энергосистем.
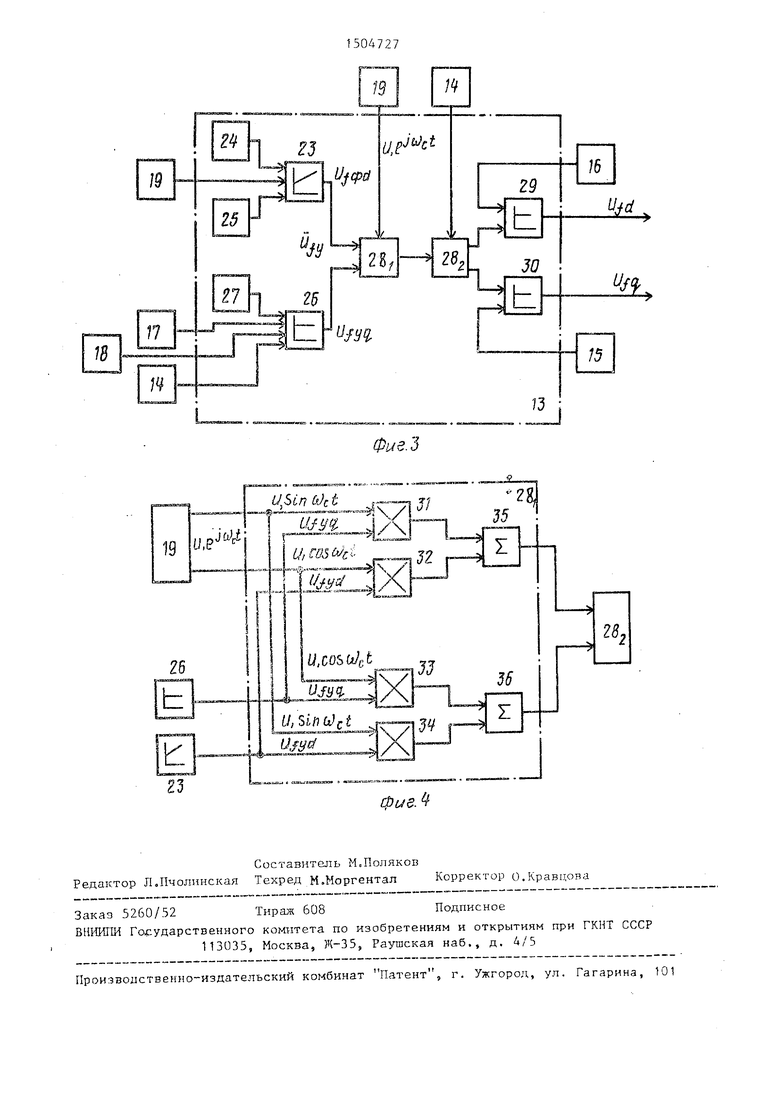
На фиг.1 изображена схема предлагаемого устройства для объединения энергосистемj на фиг.2 - схема датчика углового положения ротора; на фиг.З - схема автоматического регулирования возбуждения; на фиг.4 - схема блока преобразования координат.
Устройство для объединения энергосистем 1 и 2 содержит синхронные машины 3 и 4, продольные оси жестко соединенных роторов 5 и 6 которых расположены под углом 90 эл. град друг к другу. Синхронная машина 3 вьшолнена с двумя параллельными яко ными обмотками 7 (Х) и 8 (Х) с двумя выводами каждая. Обмотки 9 и 10 возбз ждения синхронных машин 3 и 4 подсоединены к своим возбудителям 11 и 12, выполненным, например, в виде тиристорных преобразователей частоты (ПЧ) с непосредственной связью (циклоконверторов), уп- равляюи е входы которых соединены с выходами автоматического регулятора возбуждения (АРБ) 13. Выходы датчик 14 углового положения ротора, датчиков 15 и 16 токов роторов, датчиков 17 и 18 частот объединяемых энерго
25
30
35
40
45
50
55
систем 1 и 2 и датчика 19 напряжения соединены с соответствующиг-м входами АРВ 13. У синхронной машины 3 начало (со звездочкой) якорной обмотки 7 соединено с энергосистемой 1 и ее датчикагда частоты 17 и напряжения 19. Конед якорной обмотки В соединен с энергосистемой 2 и с датчиком 18 ее частоты. Си 1хронная машина 4 выполнена с одной якорной обмоткой (Xj) с одним выводом (со звездочкой), соединенным с вторыми выводами якорных обмоток 7 и 8 маишны 3.
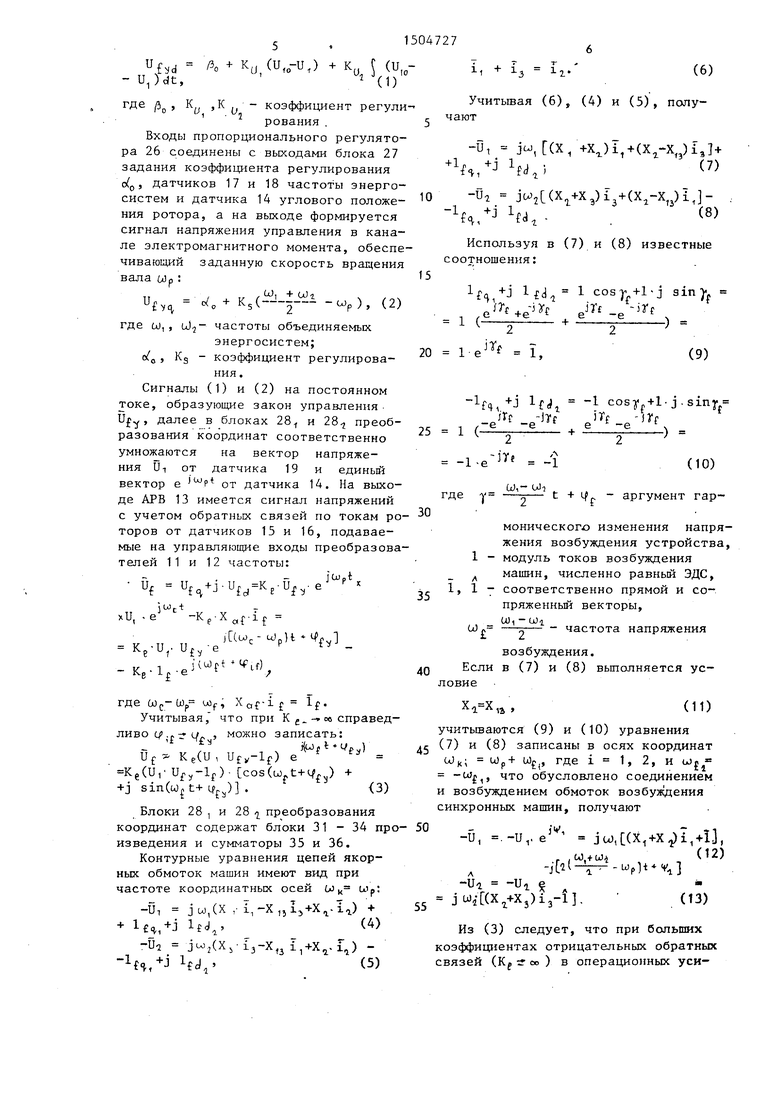
Датчик 14 углового положения ротора содер 1а Т синхронньп тахогене- ратор 20, выводы которого соединены с вьшрямительным блоком 21, на входе которого форьшруется сигнал, пропор- диональный частоте (u)p) вращения вала, и с блоком 22 пассивных интеграторов (RC-депочки), на выходе которого формируются гармонические сигналы практически постоянной амплитуды () об угловом положении вала.
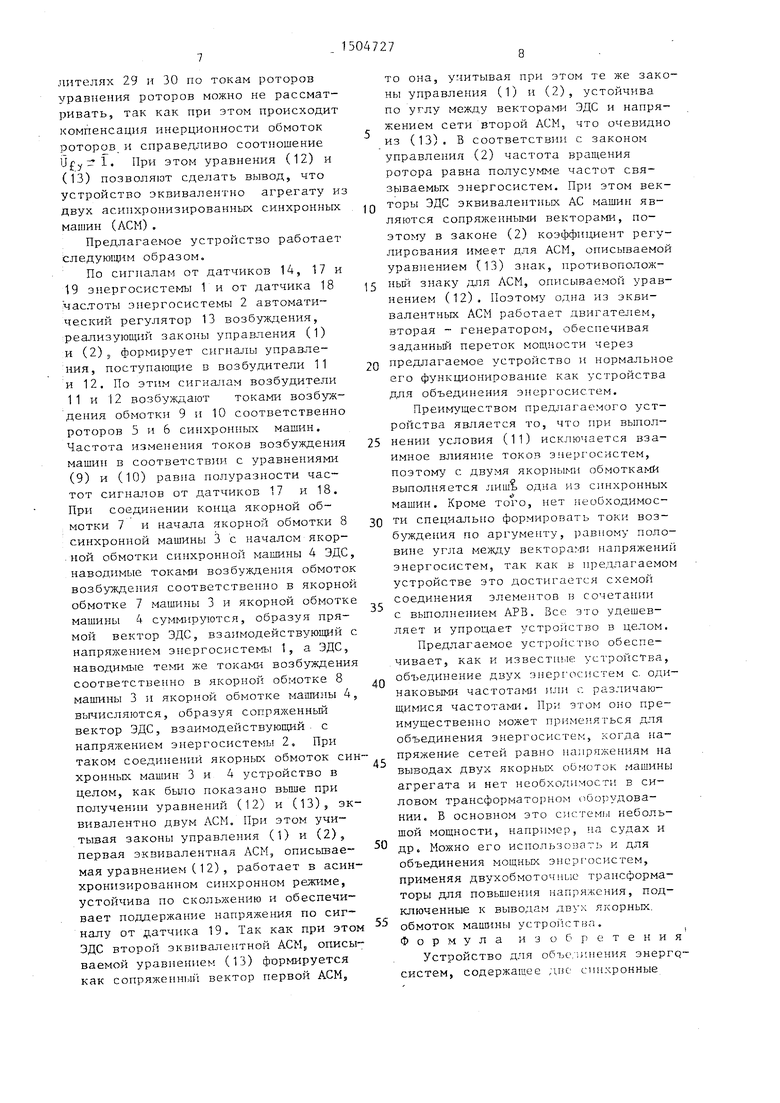
АРВ 13 выполнен гго типу АРВ асин- хронизированной синхронной машины. Входы пропорционально-интегрального регулятора 23 соединены с выходами блока 24 задания коэ(1)с1 11циента регулирования Я) , датч1п а 19 напряжения и блока 25 задания уставки напряжения, а на выходе формируется сигнал напряжения управления в капала реактивной мощности, поддерживающий напряжение и, статора в соответствии с уставкой
и,о:
Uf.d / c К (U,-U,) K (и,„ - U,)dt, (1)
где /5 , Ky ,K j - коэффициент регулирования ,
Входы пропорционального регулятора 26 соединены с выходами блока 27 задания коэффициента регулирования с/о, датчиков 17 и 18 частоты энергосистем и датчика 14 углового положения ротора, а на выходе формируется сигнал напряжения управления в канале электромагнитного момента, обеспечивающий заданную скорость вращения вала W,
2
где ш, , iJ частоты объединяемых энергосистем;
5 коэффициент регулирования.
Сигналы (1) и (2) на постоянном токе, образующие закон управления- U,j,, далее в блоках 28 и 28 преобразования координат соответственно умножаются на вектор напряжения DI от датчика 19 и единьй вектор е от датчика 14. На выходе АРВ 13 имеется сигнал напряжений
jp. Ufvcv - s(- ), (2)
,
с учетом обратных связей по токам ро торов от датчиков 15 и 16, подаваемые на управляющие входы преобразователей 11 и 12 частоты:
J О) р t
Uf ,K,.U,.e
,
xU,
-Kc-X fif
jQu),-u )t-Ч.
K -TI. )g Uf., e
j4tOft Lf)
где Ыр- Ыр ujf., X(.,f-i If.
Учитывая, что при К - м справедливо Lf.f-Lf., , можно записать: - VpJ
Uf Ke(U , Ufy-lf) e
Ke(U, U,,-lf)- cos(LOj.t+4i,j) +
+j sin(u) t+ .)
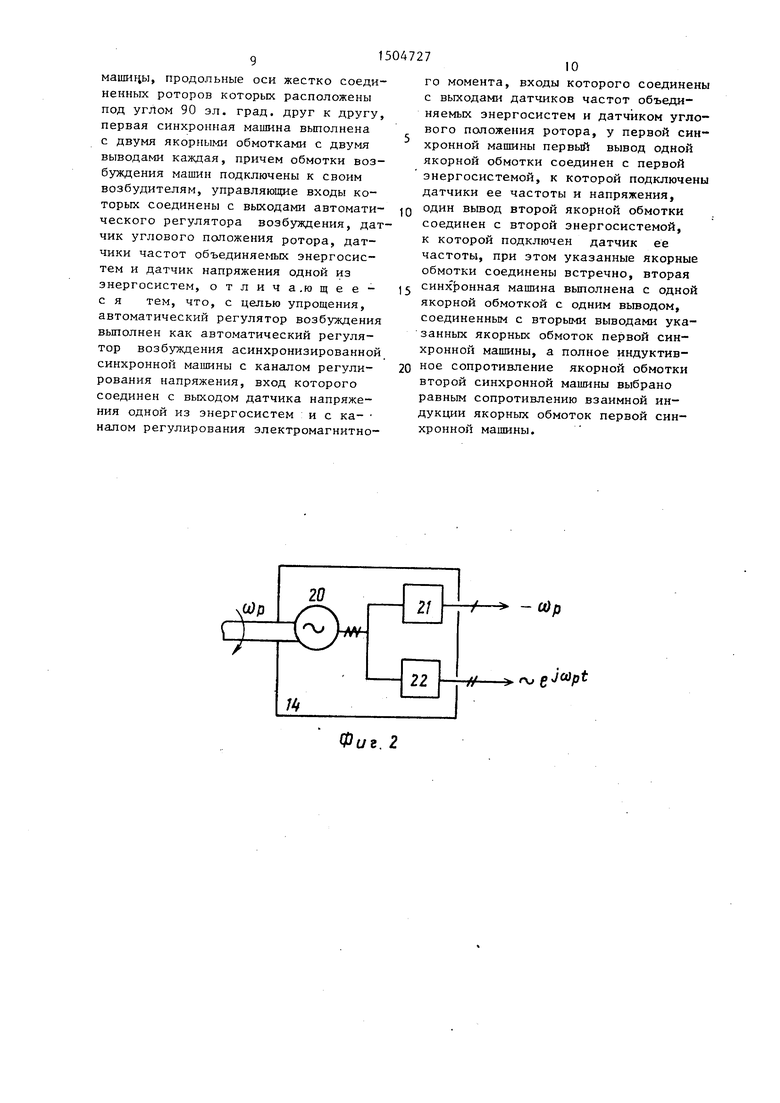
Блоки 28 , и 28 преобразования координат содержат блоки 31-34 про изведения и сумматоры 35 и 36.
Контурные уравнения цепей якорных обмоток машин имеют вид при частоте координатных осей WK Шр;
-Ui JLo,(X , i,-Х„1з+Х.1г)
ч- IH,,()
-U ju)j(X,-i3-X, i,+X,. i,) - Ifd ,(5)
+ ь
(6)
Учитьшая (6), (4) и (5), получают
-и, ju3,(X/-fX)i,+( ) ,J Ы,)(
-Ui ju)2()i3 + (,j)iJ- f./J fcl.
(8)
Используя в (7) и (8) известные
соотношения:
1
1 (
.
20
1 i,(9)
-lfq,. COSy + 1. j.sinyj
„ (.,
(10)
, 30
где
t + Lf - аргумент гар
монического изменения напряжения возбуждения устройства, 1 - модуль токов возбуждения машин, численно равный ЭДС, 1,1- соответственно прямой и со- пряженньй векторы,
О), -UJi ЫА - частота напряжения
возбуждения.
Если в (7) и (8) выполняется условие
X Х ,j ,ч 1 I
учитьшаются (9) и (10) уравнения (7) и (8) записаны в осях координат
СА)Ц; U)p+ U)j, где 1 1, 2, И -W, ЧТО обусловлено соединением и возбуждением обмоток возбуждения синхронных машин, получают
jV,
-и, .-и,, е
ju),(Xi+x,pi,+l3,
,(),+Ш4
-Ui jU)j()i3-l.
(12)
(t3)
Из (3) следует, что при больших коэффициентах отрицательных обратных связей (Kf 7Г сю ) в операционных усилителях 29 и 30 по токам роторов уравнения роторов можно не рассматривать, так как при этом происходит компенсация инерционности обмоток роторов и справедливо соотношение Ufyr. При этом уравнения (12) и (13) позволяют сделать вывод, что устройство эквивалентно агрегату из двух асинхронизированных синхронных машин (ЛСМ).
Предлагаемое устройство работает следуюнщм образом.
По сигналам от датчиков 14, 17 и 19 энергосистемы 1 и от датчика 18 частоты энергосистемы 2 автоматический регулятор 13 возбуждения, реализующий законы управления (1) и (2), формирует сигналы управления, поступаю цие в возбудители 11 и 12. По этим сигналам возбудители 11 и 12 возбуждают токами возбуждения обмотки 9 и 10 соответственно роторов 5 и 6 синхронньк машин. Частота изменения токов возбуждения машин в соответствии с уравнениями (9) и (10) равна полуразности частот сигналов от датчиков 17 и 18. Hpti соединении конца якорной обмотки 7 и начала якорной обмотки 8 синхронной машины 3 с началом якор- .ной обмотки синхронной машины 4 ЭДС, наводимые токами возбуждения обмоток возбуждения соответственно в якорной обмотке 7 машины 3 и якорной обмотке машины 4 суммируются, образуя прямой вектор ЭДС, взаимодействующий с напряжением энергосистем 1, а ЭДС, наводимые теми же токами возбуждения соответственно в якорной обмотке 8 машины 3 и якорной обмотке машины 4, вычисляются, образуя сопряженный вектор ЭДС, взаимодействующий с напряжением энергосистемы 2, При таком соединений якорных обмоток синхронных машин 3 и 4 устройство в целом, как было показано вьш1е при получении уравнений (12) и (13), эквивалентно двум АСМ. При этом учитывая законы управления (1) и (2), первая эквивалентная АСМ, описьшае- мая уравнением (1 2), работает в асин- хронизированном синхронном режиме, устойчива по скольжению и обеспечи™ вает поддержание напряжения по сиг налу от датчика 19. Так как при этом ЭДС второй эквивалентной АСМ, описываемой уравнением (13) формируется как сопряженньи вектор первой АСМ,
0
то она, учитывая при этом те же законы управления (1) и (2), устойчива по углу между векторами ЭДС и напряжением сети второй АСМ, что очевидно из (13), В соответствии с законом управления (2) частота вращения ротора равна полусумме частот связываемых энергосистем. При этом векторы ЭДС эквивалентных АС машин являются сопряженными векторами, поэтому в законе (2) коэффициент регулирования имеет для АСМ, описываемой уравнением (13) знак, противоположный знаку для АСМ, описываемой уравнением (12), Поэтому одна из эквивалентных АСМ работает двигателем, вторая генератором, обеспечивая заданный переток моЕ5Ности через предлагаемое устройство и нормальное его функционирование как устройства для объединения энергосистем.
Преимуществом предлагаемого устройства является то, что при выпол- 5 нении условия (11) исключается взаимное влияние токов энергосистем, поэтому с двумя якорными обмотками выполняется лишь одна из синхронных машин. Кроме того, нет необходимости специально формировать токи, возбуждения по аргументу, равному половине угла между вектора п1 напряжений энергосистем, так как в предлагаемом устройстве это достигается схемой соединения элементов в сочетании с вЬ Полнением АРВ. Все это удешевляет и упрощает устро; ство в целом.
Предлагаемое устройство обеспечивает, как и известные устройства, объединение двух энергос;истем с, одинаковыми частотами HJHI с различающимися частотами. При этом оно преимущественно может применяться для объединения энергосистем, когда напряжение сетей равно напряжениям на выводах двух якорных обмоток машины агрегата и нет необхо/шмостп в силовом трансформаторном чборудова- нии. В основном это системы небольшой мощности, например, на судах и др 6 Можно его использоват. и для объединения мощных энергосистем, применяя двухобмоточные трансформаторы для повышения напряжения, подключенные к выводам двл к якорных, обмоток машины устро11ствп. Формула изобретения
Устройство для объе.)И}1ения энергд- систем, содержащее ;uiC; синхронные
0
5
0
5
0
5
машир ы, продольные оси жестко соединенных роторов которых расположены под углом 90 эл. град, друг к другу, первая синхронная машина выполнена с двумя якорными обмотками с двумя выводами каждая, причем обмотки возбуждения машин подключены к своим возбудителям, управляющие входы которых соединены с выходами автоматического регулятора возбуждения, датчик углового положения ротора, датчики частот объединяемых энергосистем и датчик напряжения одной из энергосистем, отлича.ющее- с я тем, что, с целью упрощения, автоматический регулятор возбуждения выполнен как автоматический регулятор возбуждения асинхронизированной синхронной машины с каналом регулирования напряжения, вход которого соединен с выходом датчика напряжения одной из энергосистем и с ка- налом регулирования электромагнитно
го момента, входы которого соединены с выходами датчиков частот объединяемых энергосистем и датчиком углового положения ротора, у первой синхронной машины первый вывод одной якорной обмотки соединен с первой энергосистемой, к которой подключены датчики ее частоты и напряжения, один вьшод второй якорной обмотки соединен с второй энергосистемой, к которой подключен датчик ее частоты, при этом указанные якорные обмотки соединены встречно, вторая синх15онная машина выполнена с одной якорной обмоткой с одним вьгоодом, соединенным с вторыми выводами указанных якорных обмоток первой синхронной машины, а полное индуктивное сопротивление якорной обмотки второй синхронной машины выбрано равным сопротивлению взаимной индукции якорных обмоток первой синхронной машины.
Фиг. 2
u,p
ja)
™«..„.„:.-„5- /I /:.(/j/Y/
i x Kcyxaai I;
/,5б; fe/c
71 J/ wms&ti; ,,j2
X
26
y,cosa/cfc
Ь
y/i/g.
U,3in(}f:t
Uji/e/
23
Фие. З
35
71 ,
X
JJ
36
X
J
Фие.
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДА-ИНСТРУМЕНТА ДЛЯ ЭЛЕКТРОЭРОЗИОННОЙ ОБРАБОТКИ РИСУНКОВ ПРЕСС-ФОРМ | 1971 |
|
SU429921A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для шелушения зерна | 1981 |
|
SU1012971A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для объединения энергосистем | 1976 |
|
SU574818A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ботвинник М.М., Шакарж Ю.Г | |||
| Управляемая машина переменного тока | |||
| - М.: Наука, | |||
