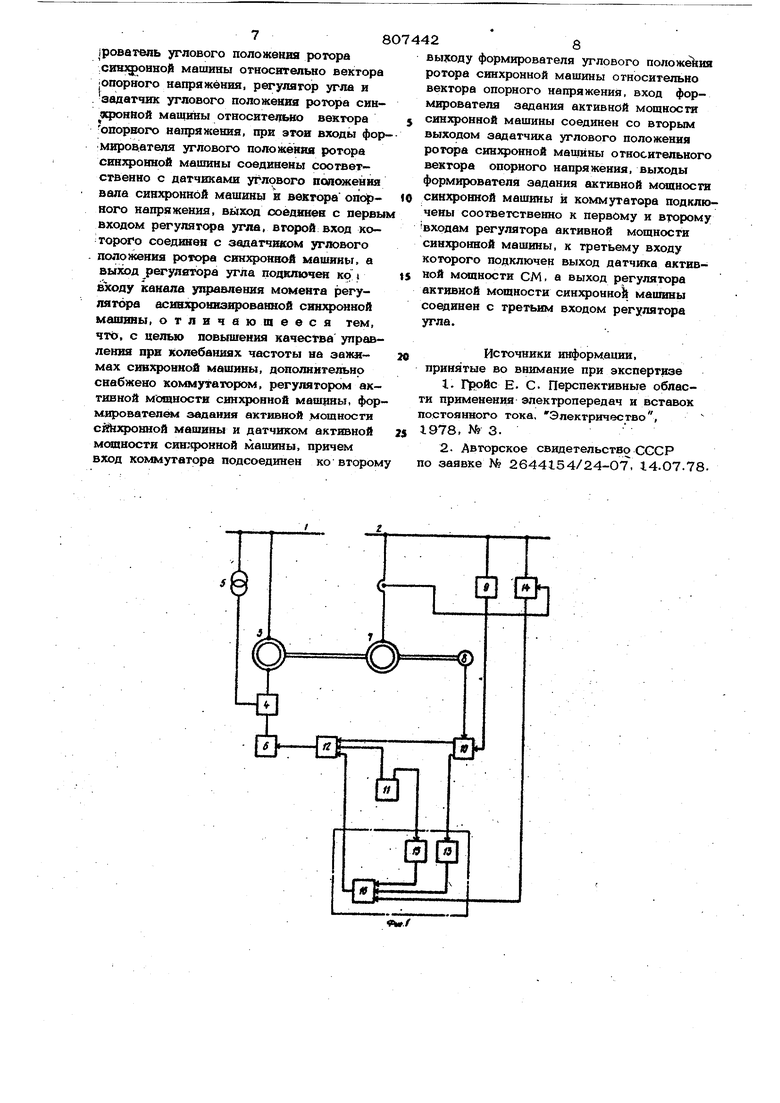
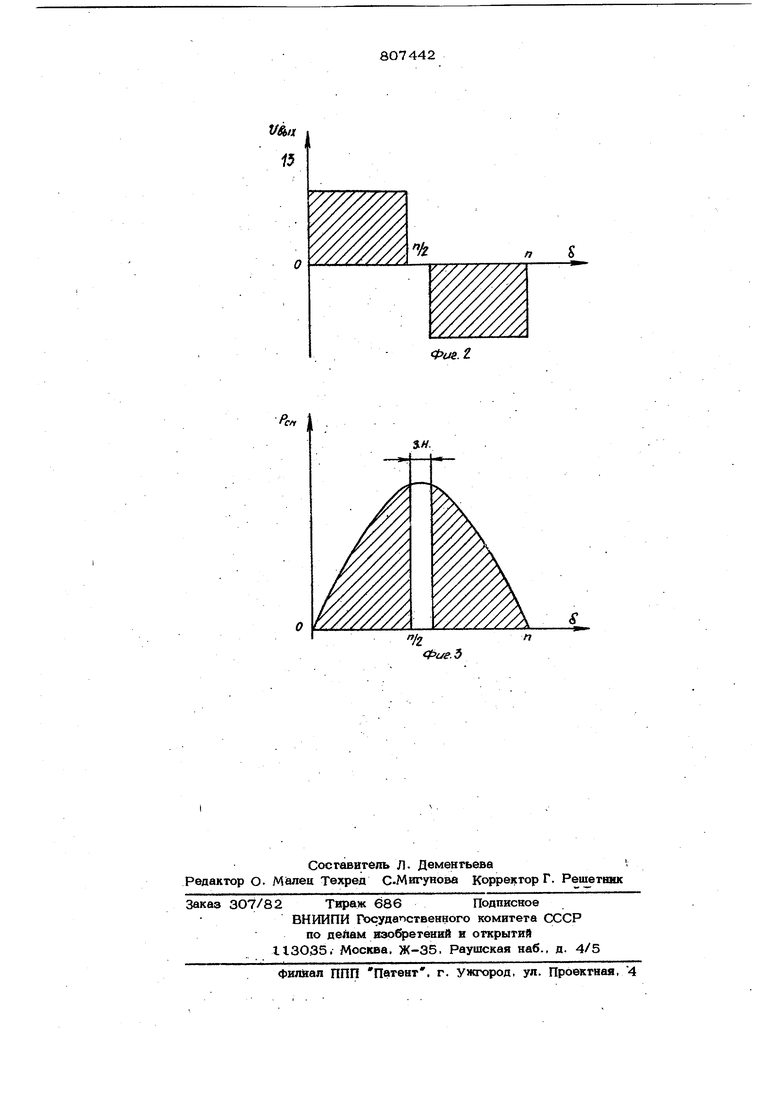
(54) УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ ПЕРЕМЕННОГО ТОКА 38 но вектора опорного напряжения, регулятор угла и задагчик углового положения ротором СМ относительно вектора опорного нагфяжония; при этом входы формирователя углового положения ротора СМ соединены соответственно с датчиками углового положения вала СМ и . вектора опорного напряжения, выход соединен с первым входом регулятора угла второй вход которого соединен с задатчкком углового положения ротора СМ, а выход регулятора угла подключен ко вхо ду канала управления моментом регулято . ра АСМ З. Недостаток этого устройства заключается в том, что при изменении частоть в системе, к которой подключена статорная обмотка СМ, изменяется значение активной мощности СМ при поддержании номинального значения напряжения на зажимах статорной обмотки СМ. Цель изобретения - повышение качества управления при колебаниях частоты на зажимах СМ. V Поставленная цель достигается, тем, что в устройство для йвязи двух энергосистем переменного тока, содержащее синхронную и асинхронизированную синхро ную машины, с жестко соединенными валами, ста торные обмотки которых подклю чены к соответствующей энергосистеме, датчик углового положения вала CMj, датчик вектора опорного напряжения энергосистемы, к которой подключены статорны обмотки СМ, управляемый тристорный преобразователь частоты для питания обмоток ротора АСМ, подключенный ко вхо ду ПЧ регулятор, имеющий канал управле ния моментом, формирователь УГЛОВОГО положения ротора СМ относительно вектора опорного напряжения, регулятор угла и задатчик углового положения ротора СМ относительно вектора опорного напряжения, при. этом входы формировател углового положения ротора СМ соединены соответственно с датчиками углового положения вала СМ и вектора опорного напряжения, выход соединен с первым входом регулятора угла, второй вход которого соединен с задатчиком углового положения ротора СМ, а выход регулятор угла подключен ко входу канала управления моментом регулятора АСМ. введены коммутатор, регулятор активной мощности СМ, формирователь задания активной мощности СМ и датчик активной мощности СМ, причем вход коммутатора подсоединен ко второму выходу формирователя углового положения ротора СМ отно2сительно вектора опорного напряжения, вход формирователя задания активной мощности СМ соединен со вторьш выходом задатчика углового положения ротора СМ относительно вектора опорного напряжения, выходы формирователя задания активной мощности СМ и коммутатора подключены соответственно к первому и второму входам регулятора активной мощности СМ, к третьему входу которого подключен выход датчика активной мощности СМ, а выход регулятора активной мощности СМ соеди11ен с третьим входом регулятора угла. На фиг. 1 представлена схема предлагаемого устройства для связи двух энергосистем переменного тока; на фиг. 2 диаграммы иgУJ (8); на фиг. 3 диаграмма р JT S) . Устройство содермшт энергосистемы переменного тока I и 2, АСМ 3. ПЧ 4системы возбуждения АСМ, трансформатор5 питания ПЧ,регулятор 6 АСМ,СМ 7, датчик8 углового положения вала СМ, датчик 9 BeKTOpia опорного напряжения той энергосистемы, к которой подключены статорные обмотки СМ, формирователь Ю углового положения ротора СМ относительно вектора опорного напряжения, задатчик II углового положения ротора СМ относительно вектора опорного напряжения, регулятор 12 угла, коммутатор 13, датчик 14 активной ощности СМ, формирователь 15 задания активной мощности СМ, регулятор 16 активной мощности СМ. К обмоткам статора АСМ 3 подводится напряжение энергосистемы 1 с частотой 60 с - К обмоткам ротора АСМ 3 подводится напряжение возбуждения. требуемой частоты и амплитуды от тиристорного ПЧ 4. Питание ПЧ 4 осуществляется от источника питания через трансформатор 5. Управление работой ПЧ осуществляется с помощью регулятора 6. К обмоткам статора СМ 7 подводится напряжение энергосистемы 2 с частотой Выход датчика 8 углового положения вала СМ и выход датчика 9 опорного напряжения соединены соответственно с первым и вторым входами формирователя 1О углового положения ротора СМ относительного вектора опорного напряжения. Выходы формирователя 10 соединены соответственно -с первым входом регулятора 12 угла и входом коммутатора 13. Выходы задатчика II углового положения ротора СМ соединены со вторым входом регулятора 12 угла и входом формирователя 15 задания активной мощности СМ. Выходы формирователя 15 задания активной мощности СМ, коммутатора 13, датчика 14 активной мощности СМ соединен соответственно с первым, вторым и третьим входами регулятора 16 активной мощности СМ. Выход регулятора 16 активной мсмцно сти СМ соединен с третьим входом регулятора 12 угла. Выход регулятора 12 угла соединен со входом регулятора 6, выход которого соединен со входом ПЧ 4 Устройство работает следующим образом . По сиг налам датчиков 8 и 9 формирователь Ю формирует сигнал углового положения ротора СМ относительно вектора опорного напряжения. Этот сигнал совместно с сигналом задания по углу от задатчика Ц поступает в регулятор 12 угла. Для улучщения качества переходных процессов регулятор 12 угла осуществляет пропорционально-интегрально-дифференциальное воздействие ка АСМ 3 через канал момента регулятора 6 при отклонении угла СМ от задания SQ . По сигналам датчика 14 активной мощности СМ и формирователя 15 задания активной мощности СМ в регуляторе 16 активной мощности формируется вели чина отклонения активной мощности СМ от установки - йР- С выхода формирователя Ю углового положения ротора СМ поступает сигнал на вход коммутатора 13. Знак сигнала, который поступает с выхода коммутатора 13 на второй вход регулятора 16 -активной мощности СМ, зависит от величины угла So которым работает СМ. При угла;х O°-iB 9GP величина сигнала положительна, а при углах - отрицательна (фиг.2). Тем самым коммутатор 13 учи тывает изменение знака приращения активной мощности Л Р при переходе, через угол So 90° . При этом комм татор 13 имеет зону неч-увствиуельности в области углов б о близких к ЭО .. Ши рина зоны нечувствительности определяе ся точностью настройки коммутатора 13 и его техническими характеристиками. При работе СМ с углами OQ вхо дяшшу1И в зону нечувствительности, вели чина сигнала на выходе коммутатора 1 равна нулю и регулятор 16 активной мо ...ности отключается;. При углах SQ . не в ходящих в зону нечувствительности, регулятор 16 актш:. ной мощности подключен к схеме управления. При регулировании по углу SQ , в случае отсутствия возмущений, определенно- му значению заданного углаВо соответствует определенное значение активной мощности СМ - Ро(фи1 З). ЕСЛИ по каким-либо причинам происходит колебание частоты энергосистеме 2. то происходит смгаоение угловой характеристики СМ. Это смещение приводит к новому значению активной мощности Р при прежнем значении угла SQ. С выхода регулятора 16 активной моШности СМ сигнал, пропорциональный , поступает на третий вход регуля-. тора 12 угла. В результате система регудафования выставляет значение мощности СМ - PQ, соответствующее углу СМ - So Тем самым на зажимах СМ поддерживается постоянная вешпина активной мощности. На аналоговой вычж; ли тельной машжне были проведены расчеты устойчивости работы предлагаемого устройства для связи двух энергосистем. Расчеты показали, что устойчивость агрегата сохраняется при любых углах синхронной машины в диапазоне /. В связи с тем, что данное устройство устойчиво работает при любых углах СМ, оно может быть устаиорчено в рассечку линии электропередачи в тобом месте независимо от длины линии, подключено к любым узлам энергосистем, включая и узлы, где требуется работа в режимах е потреблением реактивной мсядности из сети. формулу изобретения Устройство для связи двух энергосистем переменного тока, содержащее синхронную мащину и асинхронизгфованную синхронную мащину, статорные обмотки которых подключены к соответствующей энергосистеме, а валы жестко : соединены, датчик углового положения, вала синхронной машины, датчик вектора опорного напряжения энергосистемы, к которой подключены статорные обмотки синхронной мащины, управляемый тиристорный преобразователь частоты для пита гл обмоток ротора асинхронизированной синхронной мащины, подключенный ко входу преобразователя частоты регулятор с каналом управления моментом, форми-
1роввтепь углового положения ротора .свюфоввоЯ машины относительно вектора опорного напряжения, регулятор угла и задагчик углового положения ротора синжронной машины относительно вектора
опорЕюго напряжения, при этой входы формирователя углового положения ротора синхронной машины соединены соответственно с датчиками углового положения вала синхронной машины и вектора опфного напряжения, выход соед1шен с первым входом регулятора угла, второй вход которого соединен с задатчшюм углового положения ротора синхронной машины, а выход регулятора угла подключен ко t
входу канала управления момента регулятора асивхронизированной синхронной машины, отличающееся тем, что, с целью повышения качества управления при колебаниях частоты на эажимах синхронной машины, дополнительно снабжено коммутатором, регулятором активной мощности синхронной машины, формирователбямг задания активной мошносги синхронной машины и датчиком активной мощности син:сронной машины, причем вход коммутатора подсоединен ко втором
выводу формирователя углового положения ротора синхронной машины относительно вектора опорного напряжения, вход формирователя задания активной мошности синхронной машины соединен со вторым выходом задатчика углового положения ротора синхронной машины относительного вектора опорного напряжения, выходы формирователя задания активной мошности синхронной машины и коммутатора подключены соответственно к первому и второму входам регулятора активной мощности синзфонной машины, к третьему входу которого подключен выход датчика активной мсяцности СМ. а выход регулятора активной мошности синхронно машины соединен с третьим входом регулятора угла.
Источники информации, принятые во внимание при экспертизе
1. Гройс Е. С. Перспективные области применения электропередач и вставок постоянного тока, Электричество, 1978, № 3.
2- Авторское свидетельство СССР по заявке № 2644154/24-07, 14.O7.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Энергосистема | 1979 |
|
SU817856A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
VSbH 15
k
s
/Z
Ф(/е.д
