Изобретение относится к энергетике, в частности к электромеханическим преобразователям частоты для связи источников переменного тока.
В настоящее время объединяют отдельные энергосистемы в единую систему. Однако во многих случаях межсистемные связи оказываются настолько маломощными, что режим одной системы не может оказать существенного влияния на режим другой системы, поэтому взаимная синхронная работа часто оказывается невозможной. Вместе с тем нежелательна и раздельная работа, так как при этом в какой-то из них создается дополнительный дефицит. Кроме того, существуют электрические системы, в которых частота меняется из-за колебаний мощных нагрузок. При объединении этих систем с системами с повышенными требованиями к качеству электроэнергии возникают трудности взаимной синхронной работы.
В таких случаях возможно применение известных вставок постоянного тока, построенных на высоковольтных тиристорных блоках. Вставка постоянного тока состоит из двух преобразователей частоты, способных работать как в выпрямительном, так и в инверторном режимах. Преобразователи частоты соединены между собой линией постоянного тока. Такая вставка постоянного тока включается в рассечку линии электропередачи [1].
Недостатком такого устройства является его дороговизна и сложность. Кроме того, требуются дополнительные источники реактивной мощности для устойчивой работы преобразователей частоты и для покрытия нужд нагрузки, а также мощные фильтры на 5, 7, 11, 13, 17 и т.д. гармоник, так как без последних качество напряжения не удовлетворяет требованиям ГОСТ.
Известно устройство для связи двух энергосистем, взятое в качестве прототипа, содержащее синхронную машину и асинхронизированную синхронную машину, статорные обмотки которых подключены к указанным системам переменного тока, причем асинхронизированная синхронная машина снабжена управляемым преобразователем частоты и регулятором, один из входов которого соединен с датчиком частоты системы переменного тока, к которой подключены статорные обмотки этой машины, а выходы управляемого преобразователя частоты подключены к обмоткам ротора асинхронизированной синхронной машины, статорные обмотки синхронной машины подключены к энергосистеме переменного тока стабильной частоты, статорные обмотки асинхронизированной синхронной машины подключены к энергосистеме переменного тока с переменной частотой, а второй вход регулятора соединен с датчиком частоты системы переменного тока стабильной частоты [2].
Недостатком устройства также является наличие 5,7,11,13,17 гармоник в статорном напряжении машины, что вызвано коммутационными колебаниями тока возбуждения (т.е. при переходе тока с тиристора на тиристор вентильной группы) при работе тиристорного управляемого преобразователя частоты.
Были проведены комплексные испытания АС ЭМПЧ-1 мощностью 1 МВт. показавшие, что коэффициент несинусоидальности существенно не удовлетворяет требованиям ГОСТ (Кнс > 5%). При применении фильтров 5 и 7-й гармоник (как наиболее выраженных) как поотдельности, так и совместно коэффициент несинусоидальности по-прежнему не удовлетворяет требованиям ГОСТ.
Цель изобретения - улучшение качества электроэнергии снижением коммутационных колебаний тока возбуждения, вызываемых управляемым преобразователям частоты.
Это достигается тем, что асинхронизированный электромеханический преобразователь частоты, содержащий по крайней мере одну асинхронизированную синхронную машину, статорные обмотки которой подключены к одной из объединенных энергосистем или к нагрузке, причем асинхронизированная синхронная машина снабжена управляемым преобразователем частоты с подключенными к источнику возбуждения силовыми входами и автоматическим регулятором возбуждения с подключенными к нему датчиками напряжения статора и углового положения вала, датчиком или задатчиком частоты и с двумя каналами регулирования, выход преобразования частоты подключен к обмоткам возбуждения асинхронизированной синхронной машины, снабжен резисторами по числу фаз обмотки возбуждения, которые подключены к силовым выходам преобразователя частоты.
Кроме того, резисторы подключены к преобразователю частоты через катушки индуктивности, соединенные последовательно с обмотками возбуждения. При трехфазном выходе преобразователя частоты резисторы соединены по схеме треугольник. Кроме того, при трехфазном выходе управляемого преобразователя частоты резисторы соединены по схеме звезды. Кроме того, резисторы выполнены с возможностью регулирования, например, в функции скольжения асинхронизированной синхронной машины. Автоматический регулятор возбуждения снабжен блоком фазы напряжения статора, входы которого соединены с датчиком напряжения статора и задатчиком частоты, а выход соединен с входом одного из каналов регулирования. При подключении резисторов к выходам управляемого преобразователя частоты через катушки индуктивности к выходам преобразователя частоты непосредственно подключены дополнительные резисторы.
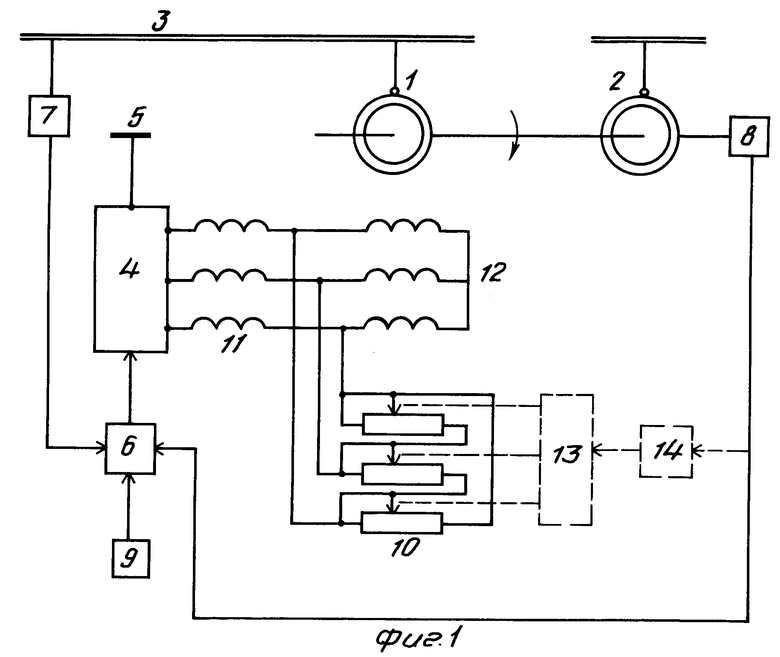
На фиг.1 показана схема предлагаемого устройства; на фиг.2 - схема автоматического регулятора возбуждения; на фиг.3 - вариант схемы подключения резисторов.
Асинхронизированный электромеханический преобразователь частоты из электрических машин 1 и 2 с жестко соединенными валами, содержит по крайней мере одну асинхронизированную синхронную машину, например машину 1, статорные обмотки которой подключены к энергосистеме 3 (или к нагрузке - на чертеже не показана). Асинхронизированная синхронная машина (АСМ) 1 снабжена управляемым преобразователем частоты 4 с подключенными к источнику возбуждения 5 силовыми входами, и автоматическим регулятором возбуждения 6, выход которого соединен с управляющим входом управляемого преобразователя частоты 4, а входы - по крайней мере с датчиками напряжения статора 7 и углового положения вала 8, датчиком или задатчиком частоты 9 (на фиг.1 показан как задатчик). Выходы активных сопротивлений 10 подключены к силовым выходам управляемого преобразователя частоты 4 через дополнительные катушки индуктивности 11 (или непосредственно) и к выводам фаз обмотки возбуждения 12.
На фиг.1 показан трехфазный выход управляемого преобразователя частоты 4 с соединением активных сопротивлений по схеме треугольник, но они могут быть соединены в звезду.
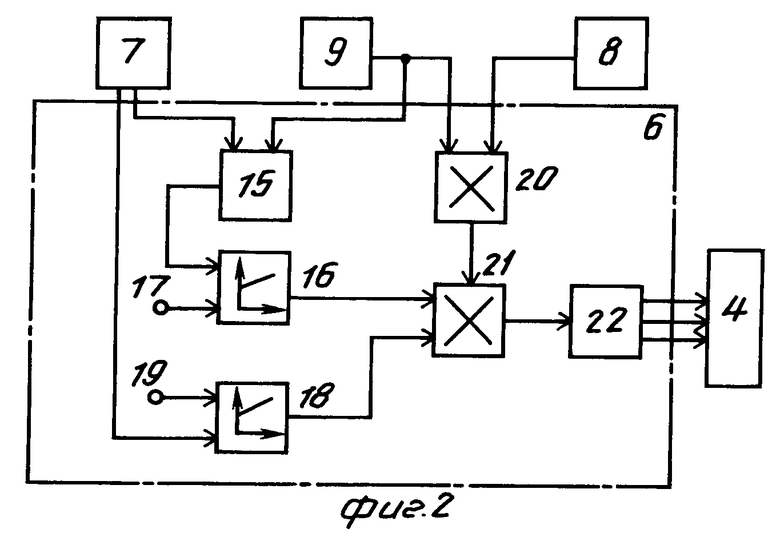
Кроме того, активные сопротивления 10 выполнены с возможностью регулирования их величины, например, в функции скольжения АСМ 1. Для этого на фиг. 1 условно пунктиром показаны исполнительный орган 13 и датчик скольжения 14. Автоматический регулятор возбуждения (АРВ) 6 (см.фиг.2) выполнен как автоматический регулятор возбуждения генератора и содержит блок 15 фазы напряжения статора АСМ 1, блок 16 регулирования и задатчик 17 фазы напряжения статора АСМ 1, блок 18 регулирования и задатчик 19 уставки величины напряжения статора АСМ 1, блоки 20 и 21 произведения и блок 22 выходных усилителей. Входы блока 16 представляет собой входы одного из каналов регулирования.
При этом входы блока 15 соединены с датчиком 7 напряжения и задатчиком 9, а выход соединен с первым входом блока 16, второй вход которого соединен с задатчиком 17. Входы блока 18 соединены с датчиком 7 напряжения и задатчиком 19 уставки напряжения. Входы блока 20 произведения соединены с задатчиком 9 частоты и датчиком 8 углового положения вала агрегата, а выход соединен с первым входом блока 21, второй и третий входы которого соединены соответственно с выходами блоков 16 и 18, а выход соединен с входом блока 22 выходных усилителей, выходы которых образуют выходы АРВ 6.
Устройство работает следующим образом.
Задатчик частоты 9 на выходе имеет сигнал постоянной частоты e , а датчик 8 углового положения вала сигнал e
, а датчик 8 углового положения вала сигнал e . Тогда на выходе блока 20 произведения имеем сигнал детектора с частотой скольжения АСМ 1
. Тогда на выходе блока 20 произведения имеем сигнал детектора с частотой скольжения АСМ 1  = e
= e e
e = e
= e = e
= e ,, обеспечивающий стабильность частоты напряжения статора АСМ 1. Далее этот сигнал в блоке 21 умножается на вектор сигнала управления
,, обеспечивающий стабильность частоты напряжения статора АСМ 1. Далее этот сигнал в блоке 21 умножается на вектор сигнала управления  , формируемого на выходах блоков 16 и 18 регулирования, и на выходе блока 21 формируется вектор сигнала управления низкой частоты
, формируемого на выходах блоков 16 и 18 регулирования, и на выходе блока 21 формируется вектор сигнала управления низкой частоты =
=  e
e = Ufy· e
= Ufy· e ., По сигналам датчика 7 напряжения статора и задатчика 19 уставки этого напряжения блок 18 регулирования обеспечивает поддержание величины напряжения статора АСМ 1. По сигналам датчика 7 напряжения и задатчика 9 частоты блок 15 формирует сигнал фазы вектора напряжения статора относительно вектора сигнала задатчика 9 частоты, а по сигналам блока 15 и задатчика 17 фазы напряжения блок 16 регулирования обеспечивает поддержание фазы напряжения статора, устраняя ее колебания, вызываемые, например, колебаниями нагрузки и т.д. Сигнал управления с выхода блока 21 усиливается блоком 22 выходных усилителей до требуемой величины и далее поступает на управляющий вход управляемого преобразователя частоты 4, формирующего на силовых выходах напряжения возбуждения АСМ 1.
., По сигналам датчика 7 напряжения статора и задатчика 19 уставки этого напряжения блок 18 регулирования обеспечивает поддержание величины напряжения статора АСМ 1. По сигналам датчика 7 напряжения и задатчика 9 частоты блок 15 формирует сигнал фазы вектора напряжения статора относительно вектора сигнала задатчика 9 частоты, а по сигналам блока 15 и задатчика 17 фазы напряжения блок 16 регулирования обеспечивает поддержание фазы напряжения статора, устраняя ее колебания, вызываемые, например, колебаниями нагрузки и т.д. Сигнал управления с выхода блока 21 усиливается блоком 22 выходных усилителей до требуемой величины и далее поступает на управляющий вход управляемого преобразователя частоты 4, формирующего на силовых выходах напряжения возбуждения АСМ 1.
Управляемый преобразователь частоты 4, выполненный как тиристорный преобразователь частоты с непосредственной связью, формирует в обмотках 12 возбуждения ток возбуждения, содержащий коммутационные колебания, вызывающие появление высших гармоник (5,7,11-й и т.д.) в напряжении статора АСМ 1, чем ухудшается качество напряжения машины. Применение фильтров 5 и 7 гармоник, а также Г-образных фильтров улучшает качество напряжения статора АСМ 1, но коэффициент несинусоидальности Кнс > 5%, т.е. не соответствует требования ГОСТ. Как показали эксперименты, требования ГОСТ к качеству напряжения удовлетворяются, если выводы активных сопротивлений 10 подключены к силовым выходам непосредственно или через дополнительные катушки индуктивности 11 и к выводам фаз обмотки возбуждения 12.
Известно, что с ростом частоты напряжения сопротивление индуктивностей растет пропорционально, активное сопротивление не меняется. Поэтому по схеме на фиг.1 индуктивности 1 снижают амплитуду гармоник тока возбуждения и тем больше, чем выше частота гармоник. Так как обмотка возбуждения 12 и активные сопротивления 10 включены параллельно, то высокочастотные гармоники тока возбуждения будут замыкаться через активные сопротивления, тем самым сглаживая ток возбуждения, а следовательно, и напряжение статора асинхронизированной синхронной машины 1.
Активные сопротивления 10 соединены по схеме треугольник или звезда и могут быть выполнены с возможностью регулирования с помощью исполнительного органа 13, например в функции скольжения от датчика 14 скольжения. Это потребуется при больших диапазонах скольжения, так как с увеличением скольжения растет и напряжение возбуждения, а чтобы ток в активных сопротивлениях 10 не превышал 5-10% от тока возбуждения, желательно соответственно увеличивать и сопротивление.
Предлагаемый асинхронизированный электромеханический преобразователь частоты обеспечивает требуемую фазу напряжения статора АСМ 1, улучшает качество напряжения статора в пределах требований ГОСТ и может быть применен в устройствах с использованием асинхронизированных синхронных машин в качестве генераторов и двигателей в системах с повышенными требованиями к качеству электроэнергии.
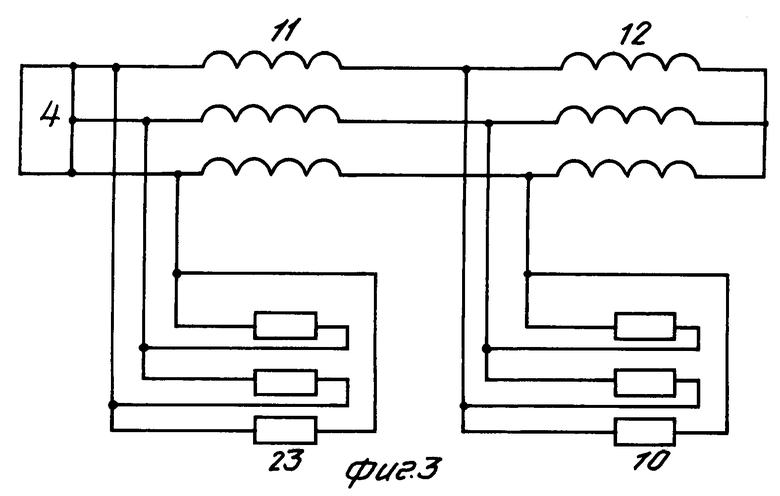
Следует отметить, что качество напряжения асинхронизированного генератора 1 можно улучшить, если подключить дополнительные активные сопротивления 23 (см.фиг.3) непосредственно к выходам управляемого преобразователя частоты 4 или через дополнительные катушки индуктивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1686595A1 |
Использование: в электроэнергетике, в частности при преобразовании частоты для связи источников переменного тока. Сущность: в асинхронизированном электромеханическом преобразователе частоты по крайней мере с одной асинхронизированной синхронной машиной с автоматическим регулятором возбуждения и тиристорным управляемым преобразователем частоты силовые выводы преобразователя и выводы фаз обмотки возбуждения машины соединены непосредственно или через катушки индуктивности с резисторами, выполненными, например, с возможностью регулирования в функции скольжения машины. Один из двух каналов регулирования автоматического регулятора возбуждения выполнен с возможностью регулирования фазы вектора напряжения статора машины относительно вектора задатчика. Резисторы могут быть соединены по схеме звезда или треугольник. 3 ил.
| Устройство для связи двух энергосистем переменного токк | 1976 |
|
SU600662A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
