(54) УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ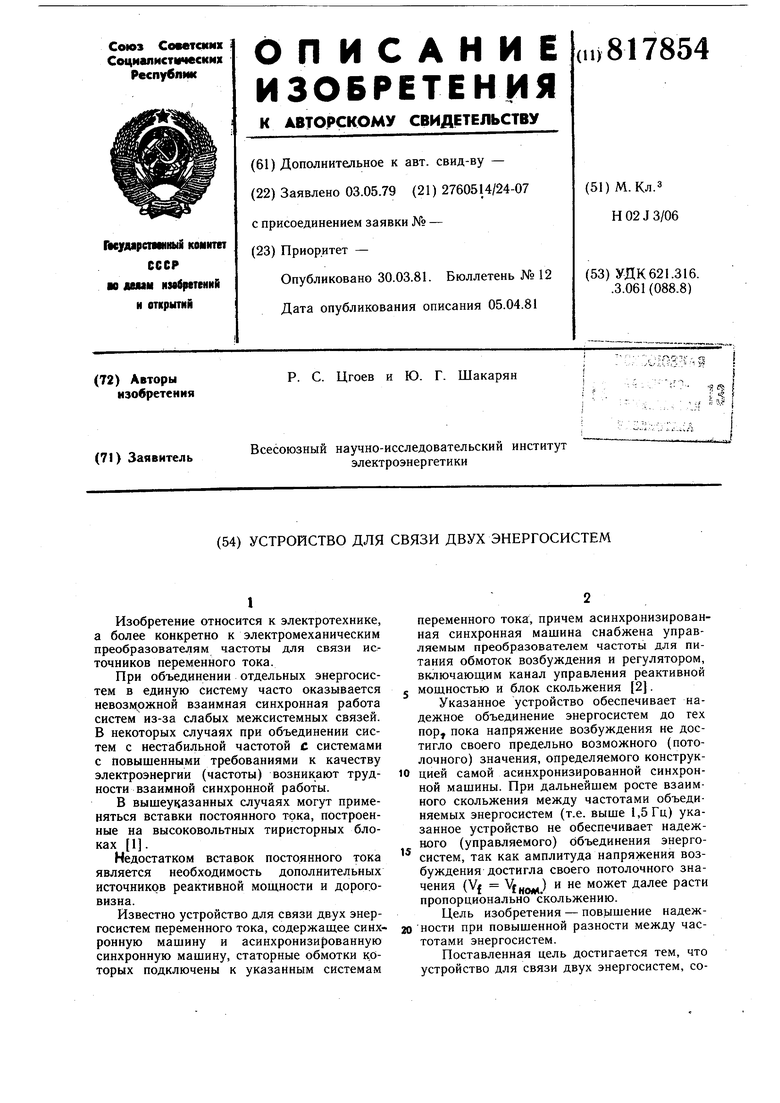

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
1
Изобретение относится к электротехнике, а более конкретно к электромеханическим преобразователям частоты для связи источников переменного тока.
При объединении отдельных энергосистем в единую систему часто оказывается невозможной взаимная синхронная работа систем из-за слабых межсистемных связей. В некоторых случаях при объединении систем с нестабильной частотой с системами с повышенными требованиями к качеству электроэнергии (частоты) возникают трудности взаимной синхронной работы.
В вышеуказанных случаях могут применяться вставки постоянного тока, построенные на высоковольтных тиристорных блоках 1.
Недостатком вставок постоянного тока является необходимость дополнительных источников реактивной мош,ности и дороговизна.
Известно устройство для связи двух энергосистем переменного тока, содержаш,ее синхронную машину и асинхронизированную синхронную машину, статорные обмотки которых подключены к указанным системам
переменного тока, причем асинхронизированная синхронная машина снабжена управляемым преобразователем частоты для питания обмоток возбуждения и регулятором, включающим канал управления реактивной мощностью и блок скольжения 2.
Указанное устройство обеспечивает надежное объединение энергосистем до тех пор, пока напряжение возбуждения не достигло своего предельно возможного (потолочного) значения, определяемого конструкцией самой асинхронизированной синхронной машины. При дальнейшем росте взаимного скольжения между частотами объединяемых энергосистем (т.е. выше 1,5 Гц) указанное устройство не обеспечивает надежного (управляемого) объединения энергосистем, так как амплитуда напряжения возбуждения достигла своего потолочного значения (YI ) и не может далее расти пропорционально скольжению.
Цель изобретения - повышение надежности при повышенной разности между частотами энергосистем.
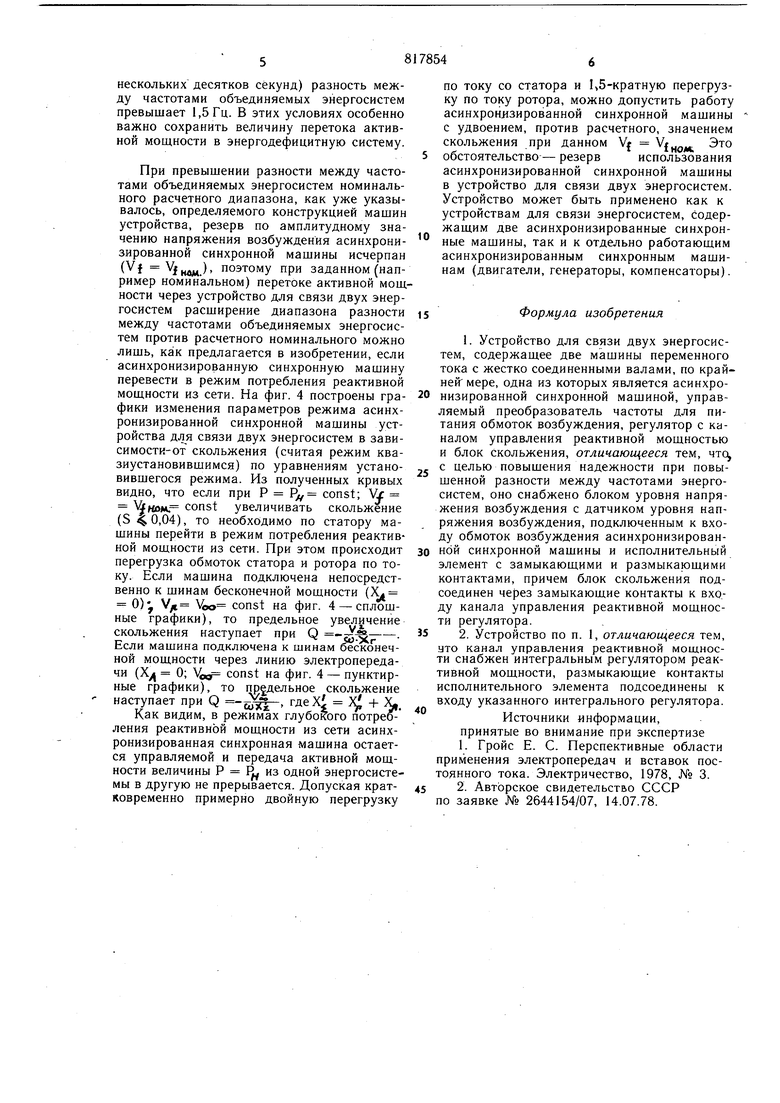
Поставленная цель достигается тем, что устройство для связи двух энергосистем, содержащее две машины переменного тока с жестко соединенными валами, по крайней мере, одна из которых является асинхронизированной синхронной машиной, управляемый преобразователь частоты для питания обмоток возбуждения, регулятор с каналом управления реактивной мошностью и блок скольжения, снабжено блоком уровня напряжения возбуждения с датчиком уровня напряжения возбуждения, подключенным к входу обмоток возбуждения асинхронизированной синхронной машины и исполнительный элемент с замыкаюшими и размь1каюшими контактами, причем блок скольжения подключен к регулятору реактивной мощности. Блок скольжения может быть подсоединен к входу канала управления реактивной .мощности регулятора через замыкающие контакты. В случае наличия у канала управления реактивной мощностью интегрального регулятора реактивной мощности, размыкающие контакты исполнительного элемента подсоединены к входу интегрального регулятора. На фиг. 1 дана общая схема устройства; на фиг. 2, 3 - фрагменты структурной схемы регулятора асинхронизированной асинхронной мащины; на фиг. 4 - графики изменения параметров режима синхронизированной синхронной мащины устройства. Устройство содержит асинхронизированную синхронную машину (АСМ) 1, преобразователь 2 частоты (ПЧ) системы возбуждения АСМ, трансформатор 3 питания ПЧ, регулятор 4 АСМ, датчик 5 углового положения вала машин, датчик 6 вектора опорного напряжения энергосистемы 1, синхронная мащина (СМ) 7, блок 8 уровня напряжения возбуждения -АСМ, датчик 9 уровня напряжения возбуждения АСМ. исполнительный элемент 10, регулятор 11 канала управления реактивной мощностью регулятора 4 АСМ, задатчик 12 реактивной мощности, блок 13 обратной связи, блок 14 скольжения регулятора 4, замыкающие контакты 15 исполнительного элемента 10, интегральный регулятор 16 (корректор) реактивной мощности регулятора 4, размыкающие контакты 17 исполнительного элемента 10, датчик 18 реактивной мощности. К обмоткам статора АСМ 1 подводится напряжение энергосистемы I с частотой Iff. К обмоткам ротора АСМ 1 подводится напряжение возбуждения требуемой частоты и амплитуды от тиристорного преобразователя 2 частоты (ПЧ). Питание ПЧ 2 осуществляется от источника через трансформатор 3. Управление работой ПЧ 2 осуществляется с помощью регулятора 4. Выход датчика 5 углового положения общего вала машин устройства и выход датчика 6 вектора опорного напряжения соединены с входами регулятора 4. К обмоткам статора СМ 7 подводится напряжение энергосистемы II с частотой . Система регулирования СМ 7 на чертеже не показана. Вход датчика 9 уровня напряжения возбуждения блока 8 уровня напряжения возбуждения подключен к обмоткам возбуждения АСМ 1, а к выходу датчика 9 подключен исполнительный элемент 10. На фиг. 2 показан фрагмент структурной схемы регулятора 4. К входу регулятора 11 канала управления реактивной мощностью подключены выходы задатчика 12 реактивной мощности, блока 13 обратной связи и блока 14 скольжения АСМ 1 через замыкающие контакты 15 исполнительного элемента 10. На фиг. 3 показан фрагмент структурной схемы регулятора 4, когда канал управления реактивной мощностью содержит интегральный регулятор 16 (корректор) реактивной мощности, к входу которого через размыкающие контакты 17 исполнительного элемента 10 подключены выходы задатчика 12 реактивной мощности и датчика 18 реактивной мощности, а выход подключён к входу регулятора 11 канала управления реактивной мощностью АСМ4. Устройство работает следующим образом. Пока разность между частотами объединяемых энергосистем не достигла заданной величины (например 1,5,Гц) и напряжение возбуждения на кольцах ротора АСМ не достигло своего потолочного значения (Vt IHOM.) контакты 15 разомкнуты, а контакты 17 замкнуты, поэтому устройство работает в обычном (номинальном) режиме. При достижении напряжения возбуждения своего потолочного значения (V| V|J,Q) и при дальнейщем увеличении скольжения между частотами объединяемых энергосистем от датчика 9 уровня напряжения возбуждения АСМ срабатывает исполнительный элемент 10 (например, реле) и размыкает свои замыкающие контакты 15. Тем самым к каналу управления реактивной мощности подключается выход блока 14 скольжения, в силу чего при дальнейщем росте скольжения между частотами объединяемых энергосистем АСМ переводится в режим потребления реактивной мощности из сети. При этом величина потребляемой из сети реактивной мощности изменяется пропорционально скольжению между частотами объединяемых энергосистем. Аналогично работает устройство и при наличии корректора 16 в канале управления реактивной мощностью. При этом размыкающие контакты 17 размыкаются, а корректор 16 запоминает величины последнего сигнала управления по реактивной мощности. При снижении величины скольжения между частотами объединяемых энергосистем и при напряжении возбуждения АСМ V Vt схема авто1 тноМ . матически возвращается в исходное положениеВ аварийных или послеаварийных условиях в энергосистемах могут возникнуть ситуации, когда кратковременно (в течение
нескольких десятков секунд) разность между частотами объединяемых энергосистем превышает 1,5 Гц. В этих условиях особенно важно сохранить величину перетока активной мощности в энергодефицитную систему.
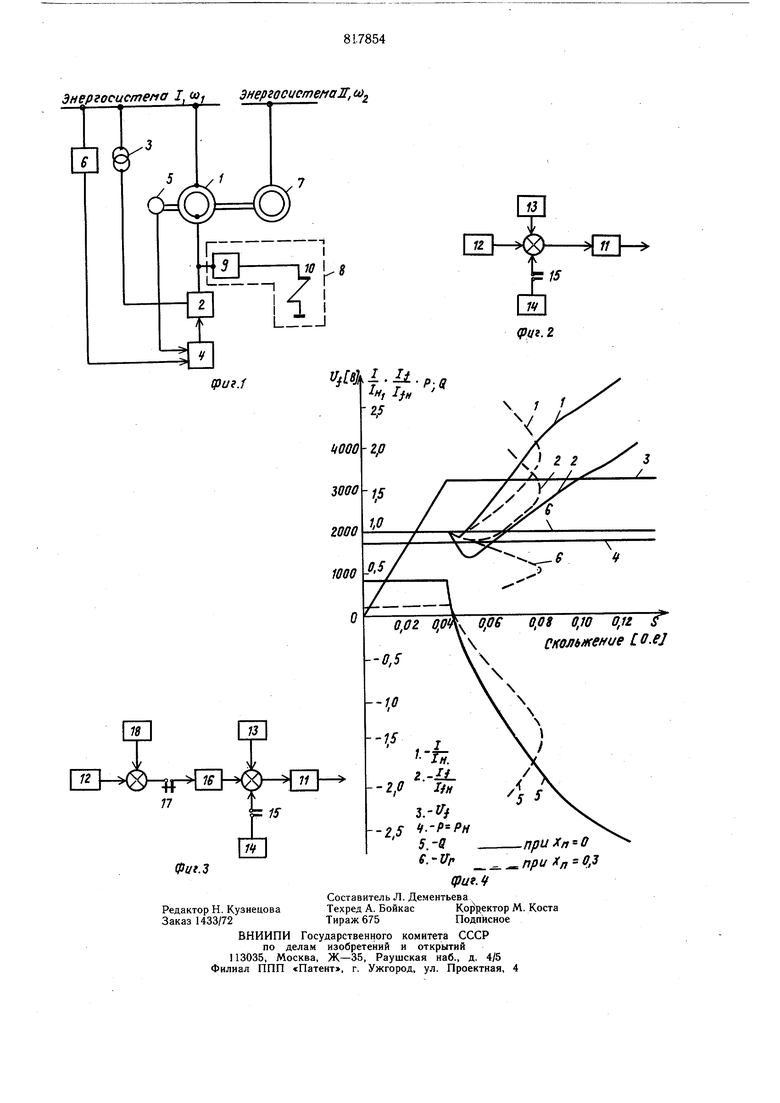
При превышении разности между частотами объединяемых энергосистем номинального расчетного диапазона, как уже указывалось, определяемого конструкцией машин устройства, резерв по амплитудному значению напряжения возбуждения асинхронизированной синхронной машины исчерпан (Vf Vjfj), поэтому при заданном (например номинальном) перетоке активной мощности через устройство для связи двух энергосистем расщирение диапазона разности между частотами объединяемых энергосистем против расчетного номинального можно лишь, как предлагается в изобретении, если асинхронизированную синхронную машину перевести в режим потребления реактивной мощности из сети. На фиг. 4 построены графики изменения параметров режима асинхронизированной синхронной машины устройства для связи двух энергосистем в зависимости-от скольжения (считая режим квазиустановившимся) по уравнениям установившегося режима. Из полученных кривых видно, что если при Р F const; Л ком. const увеличивать скольжение (S 0,04), то необходимо по статору мащины перейти в режим потребления реактивной мощности из сети. При этом происходит перегрузка обмоток статора и ротора по току. Если машина подключена непосредственно к шинам бесконечной мощности (Х 0) V Jx const на фиг. 4 - сплошные графики), то предельное увеличение
скольжения наступает при Q
Если машина подключена к шинам бесконечной мощности через линию электропередачи (Ху| 0; Vt,f const на фиг. 4 - пунктирные графики), то предельное скольжение наступает при Q , гдеХ } + Х,
Как видим, в режимах глубокого потребления реактивной мощности из сети асинхронизированная синхронная мащина остается управляемой и передача активной мощности величины Р RJ из одной энергосистемы в другую не прерывается. Допуская кратковременно примерно двойную перегрузку
по току со статора и 1,5-кратную перегрузку по току ротора, можно допустить работу асинхронлзированной синхронной машины с удвоением, против расчетного, значением скольжения при данном Vf
обстоятельство - резервиспользования
асинхронизированной синхронной машины в устройство для связи двух энергосистем. Устройство может быть применено как к устройствам для связи энергосистем, содержащим две асинхронизированные синхронные мащины, так и к отдельно работающим асинхронизированным синхронным машинам (двигатели, генераторы, компенсаторы).
Формула изобретения
15
I. Устройство для связи двух энергосистем, содержащее две машины переменного тока с жестко соединенными валами, по крайней мере, одна из которых является асинхро0 низированной синхронной машиной, управляемый преобразователь частоты для питания обмоток возбуждения, регулятор с каналом управления реактивной мощностью и блок скольжения, отличающееся тем, чтс с целью повыщения надежности при повышенной разности между частотами энергосистем, оно снабжено блоком уровня напряжения возбуждения с датчиком уровня напряжения возбуждения, подключенным к входу обмоток возбуждения асинхронизирован0 ной синхронной машины и исполнительный элемент с замыкающими и размыкающими контактами, причем блок скольжения подсоединен через замыкающие контакты к вхо,ду канала управления реактивной мощности регулятора.
5 2. Устройство по п. 1, отличающееся тем, НТО канал управления реактивной мощности снабжен интегральным регулятором реактивной мощности, размыкающие контакты исполнительного элемента подсоединены к входу указанного интегрального регулятора.
Источники информации, принятые во внимание при экспертизе 1. Гройс Е. С. Перспективные области применения электропередач и вставок постоянного тока. Электричество, 1978, № 3.
2- Авторское свидетельство СССР по заявке № 2644154/07, 14.07.78.
