Изобретение относится к электротехнике и может быть использовано для управления электроприводом преимущественно сменного ротора центрифуги.
Цель изобретения повышение надежности устройства путем увеличения точности определения частоты вращения
На чертеже изображена структурная схема устройства.
Устройство содержит сменный ротор 1, находящийся на оси асинхронного электродвигателя 2, получамцего напряжение питания от преобразователя 3 частоты. С ротором 1 оптически связан датчик 4 оптических меток, выход которого подключен к входу частотомера
5и измерителя 6 интервалов времени. Выход частотомера 5 соединен с первыми входами блока 7 регулирования час- тоты и частотного дискриминатора 8. Выход блока 9 задания частоты вращения соединен с вторым входом блока 7 регулирования частоты, выход которого подключен к первому входу преобразо- вателя 8 частоты, второй вход которого соединен с выходом частотного дискриминатора 8. Первый выход измерителя 6 интервалов времени подключен
к входу число-импульсного дискримина- тора 10.
Первый вход схемь. 11 совпадений соединен с вторым выходом измерителя
6интервалов времени, а второй вход с выходом число импульсного дискрими- натора 10 и с входом генератора 12 пачек импульсов. Выход схемы совпаде ния подключен к первым входам первого оперативного запоминакхцего устройства (ОЗУ) 13 и второго ОЗУ 14, выходы которых подключены соответственно к первому и второму входам блока 15 вычитания. Выход генератора 12 пачек импульсов соединен с входом счетчика 16, выход которого подключен к входу дешифратора 17. Первый выход дешифратора 17 подключен к второму входу первого ОЗУ 13, второй выход дешифратора 17 соединен с вторым входом втог рого ОЗУ 14, - с третьим вхо- дом блока 15 вычитания, четвертый - с первыми входами блока 18 нормирования и третьего ОЗУ 19. Выход блока 15 вычитания подключен к входу сумматора 20, выход которого соединен с вторым входом блока 18 нормирования. Второй вход третьего ОЗУ 19 подключен к выходу блока 18 нормирования, первый выход - к входу блока 21 выделения
минимума, а второй выход.- к первому входу блока 22 декодирования. Второй вход последнего соединен с выходом блока 21 выделения минимума, а выход- с входом четвертого ОЗУ 23, выход которого подключен к второму входу частотного дискриминатора 8.
Устройство для управления электроприводом работает следукщим образом.
В начале работы блок 9 задания частоты вращения задает на блок 7 регулирования частоты код, соответст- вунщий фиксированной частоте вращения например 500 об/мин. Через несколько секунд ротор 1 приобретает частоту вращения, близкую к заданной фиксированной частоте. На выходе датчика 4 оптических меток появляется последовательность импульсов, период следо-. вания которых (номинально постоянньй) фактически варьирует от импульса к импульсу. Изменения периода следования импульсов определяются в основном технологическим разбросом при нанесении меток на ротор 1.
Значения варьирующих интервалов времени последовательно вырабатываются на втором выходе измерителя 6 интервалов времени и поступают на первый вход схемы 11 совпадений в виде многоразрядного двоичного кода. Количество измеряемых интервалов должно быть не меньше 2 М - удвоенного
ч я КС
максимально возможного количества меток на роторе 1. Количество измеряемых интервалов определяется число-импульсным дискриминатором 10, выраба- тывакщим разрешающий сигнал на втором входе схемы 11 совпадений в интервале следования 2Н/ импульсов с второ-го выхода измерителя 6 интервалов времени. Измеренные значения интервалов времени с выхода схемы 11 совпадения поступают на первые входы первого ОЗУ 13 и второго ОЗУ 14 и запоминаются ими.
По окончании импульса на выходе число-импульсного дискриминатора 10 генератор 12 пачек импульсов вырабатывает последовательность импульсов, количество которых должно быть не меньше (,,+М,„) (М,„,,-М„,„-И ). Импульсы этой последовательности подсчитываются счетчиком 16. Дешифратор 17, подключенный к выходу этого счетчика, вырабатывает на своем первом выходе коды чтения 1-го,2-го,...
.MH чисел, записзи- ных в первом ОЗУ 13. Одновременно де- щифратор 17 вырабатывает на своем втором выходе коды чтения (Мд,„„ + 1), (лдмн 2) ,.. . ,2Мд,„-го чисел, записанных во втором ОЗУ 14. Дешифратор 17 вырабатывает на своем третьем выходе синхроимпульс, поступающий на третий вход блока 15 вычитания. Во время действия этого импульса блок 15 вычитания производит вычитание кодов, поступающих с первого ОЗУ 13 и второго ОЗУ 14. Код разности (который может учитывать или не учитывать ее знак) поступает на вход сумматора 20. В момент поступления от генератора 12 пачек импульсов М „„-го импульса дешифратор 17 вырабатывает на своем четвертом выходе импульс, поступающий на первые входы блока 18 нормирования и третьего ОЗУ 19. Под действием этого импульса блок 18 нормирования делит число на выходе сумматора 20 на коэффициент, связанный с M,, например на М,,, а третье ОЗУ 19 запоминает результат деления и соответ- ствуняцее данному циклу значение М (т.е. в данном случае значение М,). В следующем цикле поступления импульсов от генератора 12 пачек импульсов дешифратор 17 вырабатывает на своем первом выходе коды чтения 1-го, 2-го, ..., (Ммин+ )-го . чисел записанных в первом ОЗУ 13. Одновременно дешифратор 17 вырабатывает на своем втором выходе коды чте- ия (), (М„„„+3),...,2()го чисел.записанных во втором ОЗУ 14. Аналогично предыдущему циклу сумматор 20 производит суммирование разностей чисел, поступающих на первый и второй входы блока )5 вычитания. Блок 18 нормирования производит деление полученной суммы на (), а третье ОЗУ 19 запоминает результат деления и соответствующее данному циклу значение М (т.е. в данном случае
значение Мд„ц„+О. I
В последнем цикле поступления импульсов от генератора 12 пачек импульсов дешифратор 17 вырабатывает на своем первом выходе коды чтения 1-го, 2-го, ...« чисел, записанных в первом ОЗУ 13. Одновременно дешифратор I7 вырабатывает на своем втором выходе коды чтения (М.,о,с+1 , М «кс + +2,.,. ,)го чисел записанных во
47786
втором ОЗУ 14, Лиллогично предмауп1им циклам сумматор 20 производит суммирование разностей чисел, поступающих
g на первый i второй входы блока 15 вычитания. Блок 18 нормирования производит деление полученной суммы на мчкс третье ОЗУ 19 запоминает результат деления и соответствующее дан0 ному циклу значение М (т.е. в данном случае значение ) Блок 21 выделения минимума определяет минимальную из запомненных в третьем ОЗУ нормированных сумм, а блок декодирования
5 преобразует число М, соответствугацее минимальной сумме, в код предельно допустимой частоты вращения ротора. Этот код запоминается в четвертом ОЗУ 23, с выхода которого поступает ;0 на второй вход частотного дискриминатора 8.
Далее блок 9 задания частоты вращения вырабатывает на втором входе блока 7 регулирования частоты сигналы
5 для увеличения частоты вращения в соответствии с заданной программой разгона. На первый вход блока 7 регулирования частоты поступают сигналы с выхода частотомера 5. С выхода блока
0 7 регулирования частоты на первый
вход преобразователя 3 частоты поступают сигналы увеличивающейся частоты, ротор разгоняется. Сигналы фактической и предельно допустимой частот
g вращения поступают на входы частотного дискриминатора 8. Если фактическая частота вращения ротора превышает предельно допустимую, сигнал частотного дискриминатора 8, поступая на
0 второй вход преобразователя 3 частоты, производит остановку электродвигателя 2 с ротором 1.
Использование данного устройства позволит повысить надежность работы
5 центрифуг, поскольку исключаются случаи ошибок при считывании количества меток на роторе и, следовательно, случаи неправильного измерения частоты вращения.
0
Формула изобретения
Устройство для управления электроприводом, преимущественно сменного 5 ротора центрифуги, содержащее преобразователь частоты, датчик оптических меток, блок заданий частоты вращения, частотный дискриминатор, блок регулирования частоты, частотомер, измеритель интервалов времени, число-импульсный дискриминатор, два оперативных запоминаиицих устройства, блок декодирования , выход датчика оптических меток подключен к входам измерителя интервалов времени и частотомера, выход которого подключен к первым входам частотного дискриьшнатора и блока регулирования частоты, второй вход которого подключен к выходу блока задания частоты вращения, а выход - к первому входу преобразователя частоты, второй вход которого подключен к выходу частотного дискриминатора, пер вый выход измерителя интервалов времени подключен к входу число-импульсного дискриминатора, отличающееся тем, что, с целью повышения надежности путем увеличения точ- ности определения частоты вращения, в него введены счетчик, дешифратор, сумматор, блок вычитания, генератор пачек импульсов, блок нормирования, блок выделения минимума, схема совпа- дений и два оперативных запоьмнакщих устройства, при этом первый вход схе- М1Л совпадений соединен с вторым выходом измерителя интервалов времени, а второй вход - с илходом частотно-им- пульсного дискриминатора и с входом генератора пачек импульсов, выход
схемы совпадения подключен к первым входам первого и второго оперативных запоминающих устройств, выходы которых подключены соответственно к первому и второму входам блока вычитания,, выход генератора пачек импуль- сов соединен с входом счетчика, выход которого подключен к входу дешифратора, первый, второй, третий и четвертьй выходы дешифратора подключены соответственно к вторым входам первого и второга оперативных запоминающих устройств, третьему входу блока вычитания, к первым входам блока нормирования и третьего оперативного запоминающего устройства, выход блок вычитания подключен к входу сумматора, выход которого соединен с вторым входом блока нормирования, второй вход третьего оперативного запоминающего устройства подключен к выходу блока нормирования, первый выход - к входу блока выделения минимума, а второй выход - к первому входу блока декодирования, второй вход которого соединен с выходом блока выделения минимума, а выход - с входом четвертого оперативного запоминающего устройства, выход которого подключен к второму входу частотного дискриминатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем сменного ротора центрифуги | 1986 |
|
SU1599965A1 |
| Устройство для управления асинхронным электродвигателем переменного тока сменного ротора центрифуги | 1987 |
|
SU1702508A1 |
| ИЗМЕРИТЕЛЬ ОТНОСИТЕЛЬНЫХ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК | 2001 |
|
RU2291452C2 |
| КОРРЕЛЯЦИОННЫЙ АНАЛИЗАТОР ЧАСТОТНЫХ СВОЙСТВ ЛИНЕЙНОЙ СИСТЕМЫ | 2003 |
|
RU2242013C2 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ШУМОВОЙ ИНТЕРМОДУЛЯЦИИ | 2003 |
|
RU2252425C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКА | 1992 |
|
RU2065667C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Измеритель частоты | 1989 |
|
SU1691768A1 |
| Устройство для прогнозирования ресурса работы механических систем | 1984 |
|
SU1247897A1 |
| ИЗМЕРИТЕЛЬ ОТНОСИТЕЛЬНЫХ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК | 2017 |
|
RU2668951C1 |
Изобретение относится к электротехнике и может быть использовано для привода центрифуги. Целью изобретения является повышение надежности путем увеличения точности определения частоты вращения. В устройство для управления электроприводом преимущественно сменного ротора центрифуги введена логическая схема обработки сигналов с выхода измерителя 6 интервалов времени и число импульсного дискриминатора 10, включающая схему 11 совпадения, генератор 12 пачек импульсов, счетчик 16, дешифратор 17, сумматор 20, блок 15 вычитания, блок 18 нормирования, блок 21 выделения минимума. Логическая схема компенсирует влияние скольжения на малой частоте вращения. Это исключает возможность неправильного считывания меток с датчика 4 оптических меток.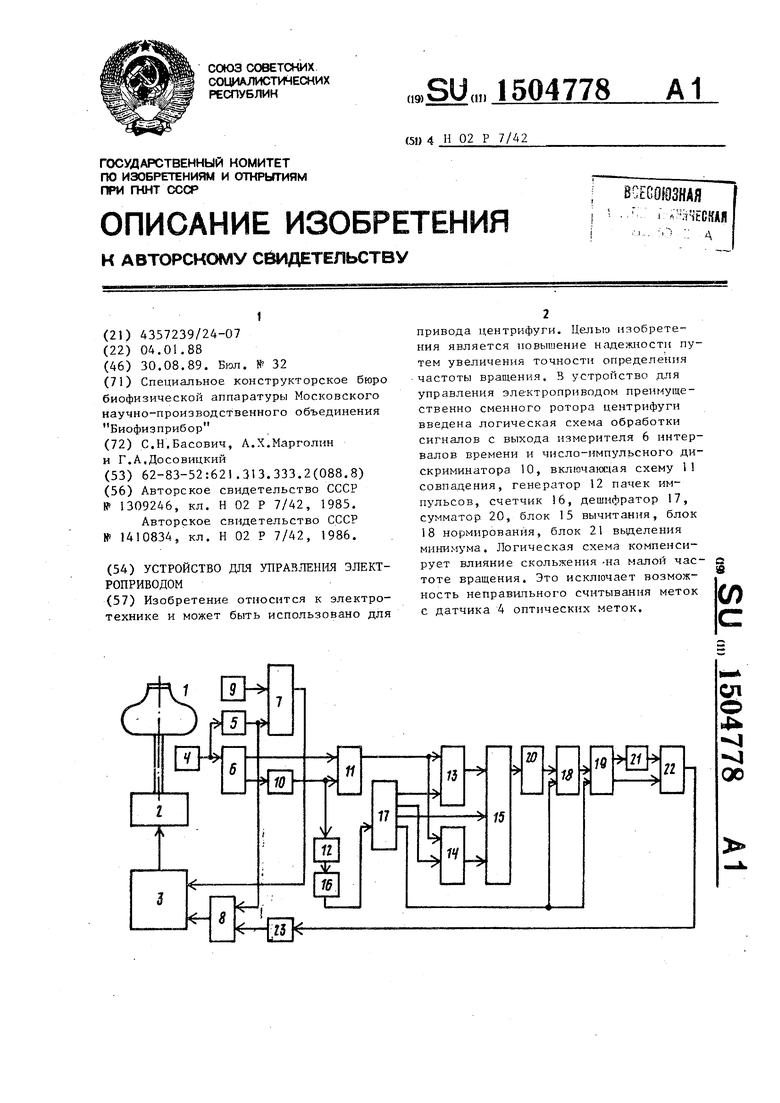
| Устройство для управления электроприводом | 1985 |
|
SU1309246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1410834, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
