/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для сбора табачных листьев | 1989 |
|
SU1692350A1 |
| Устройство для сбора табачных листьев | 1990 |
|
SU1692351A1 |
| Табакоуборочный комбайн | 1979 |
|
SU791296A1 |
| Устройство для отделения листьев от стеблей | 1986 |
|
SU1387901A1 |
| ТАБАКОУБОРОЧНЫЙ КОМБАЙН | 2000 |
|
RU2178966C2 |
| Устройство для отделения листьев табака | 1987 |
|
SU1491385A1 |
| АППАРАТ ДЛЯ ОТДЕЛЕНИЯ ЛИСТЬЕВ ТАБАКА ОТ СТЕБЛЕЙ | 1972 |
|
SU358997A1 |
| МАШИНА ДЛЯ УБОРКИ ТАБАКА | 1969 |
|
SU234775A1 |
| ЛИСТООТДЕЛЯЮЩИЙ РАБОЧИЙ ОРГАН ТАБАКОУБОРОЧНОГО КОМБАЙНА | 1994 |
|
RU2086091C1 |
| Листоотделяющий рабочий орган табакоуборочной машины | 1989 |
|
SU1616541A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для уборки листьев табака и других сельскохозяйственных культур. Целью изобретения является повышение эффективности выполнения технологического процесса сбора листьев табака путем увеличения полноты сбора и обеспечение ориентированной укладки листьев в накопитель. На транспортном средстве с возможностью возвратно-поступательного перемещения посредством горизонтальных направляющих 1 установлена каретка 3. Каретка 3 несет жестко связанную с ней штангу 4, на которой смонтированы механизмы 5 вертикального перемещения в виде гидроцилиндров 6. На штоках 7 гидроцилиндров 6 размещены левая 10 и правая 11 траверсы С-образной формы. На каждой траверсе 10 и 11 установлены датчики 24 и 23 обнаружения стебля. На нижнем конце траверс 10 и 11 смонтированы управляемые устройства горизонтального перемещения 14 и 15, несущие листоотделяющий механизм 22 и датчик обнаружения листа, управляющий его работой. Листоотделяющий механизм 22 выполнен в виде двух расположенных симметрично одна другой частей, состоящих из размещенных друг над другом и закрепленных на кронштейнах 20 и 21 датчик контакта стебля, ножа, датчика листа, вакуумного захвата. В момент расположения стебля растения в плоскости действия датчиков 23 и 24 подается сигнал в блок управления, и каретка 3 начинает перемещаться со скоростью агрегата, но в обратном направлении. Одновременно происходит срабатывание устройств горизонтального перемещения 14 и 15. После касания датчиков контакта со стеблем растения осуществляются смыкание листоотделяющего механизма 22 и отделение листьев с дальнейшей их ориентированной укладкой в накопитель 12. 2 з.п.ф-лы, 5 ил.
12
fS 1 1 18 20 17
д
(Л
X
к
С71
О
сл
О5 00
17 19 22 21 Фиг.1
средством горизонтальных направляющих 1 установлена каретка 3. Каретка 3 несет жестко связанную с ней штангу 4, на которой смонтированы механизмы 5 вертикального перемеи1ения в виде гидроцилиндров 6, На штоках 7 гидроцилиндров 6 размещены .к ная 10 и 11 траверсы С-образной формы. На каждой траверсе 10 и 11 установлены датчики 24 и 23 (обнаружения стеб,-1я. На нижнем конце Т1)аверс 10 и 11 смонтиро- ваны управляемые устройства горизонтального перемещения 14 и 15, несущие листо- отделяющий механизм 22 и датчик обнаружения листа, управляющий его работой. Листоотделяющий механизм 22 выполнен в виде двух расположенных симметрично одна
Изобретение относится к сельскохозяйственному манппюстроению и .может быть иснользовано для уборки листьев табака и других се. 1ьскохозяйствепньгх культур.
изобретения яв.пяется пов1 11иение эффект и в нос г и выполнения технологического процесса сбора листьев табака путем обеспечения увеличения нолноты сбора и ориентированной ук.1адк11 листьев в накопигель.
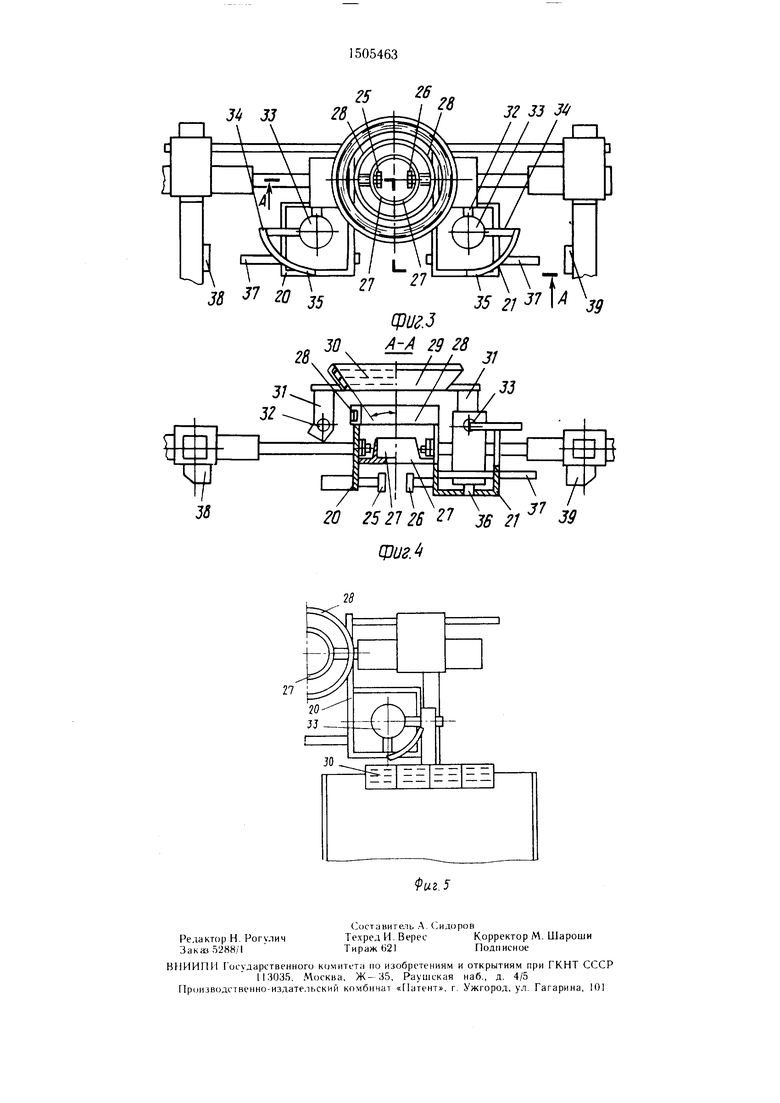
На фиг. 1 изображен агрегат для сбора табачны.х .шстьс в; на фи. 2 -- то же, 1И1Д на i})m . 3 .листоотде.пяющий орган; на фиг. .4разрез . : на |1нг. 2; на
фиг. 5 листо)тде.ля1О1ЦИ11 орган, iipaiian часть.
Arpci ;i i д. 1Я сбора 1 абачпых . содержит I р;и1С 1Орг11ое средство 1 ипа коклирснсн1 и 1 тракгор (не ноказап), на кото ром смонтированы горизонтальные наираи- .1ЯК)нп1е 1 с установленно на них с н(озмож ностью i()3H) а т но-поступательного нерсме- Н1ения чп-редством цилиндра 2 упраи. карет1 о11 I, несущей жестко связанную с ней miTiHry 4. На KcjHnax иосмедней -мги тированы к хан11змы ;i вертика.льного щ ре мещенмя. содержащие цилиндры (, на ;iiio- ках 7 Которых посрсдл тиом (JKiainieB 8 и ii;i ||ран.:|ЯН)Н1их 9 шдвешены левая И) и правая II rpaiU jicbi C -o6pa3Hoii ф(1)мы. На H i/iv:ii;x горизонта.И)НЫ частях iiaHeiic И) и 1 I установлены накопители 12 и 13 симмегрично распо.тоженные устройства 14 и 15 гориюн- тально|() пе)емещеиия. состоящие ir; цилиндров 16 и 17, со игюками KS и 19 р1лх жестко соединены к)оп1И1 еГ|ны 20 и 21. песупще на себе листоотделяющий .механизм 22. На каждо11 г)аве)се 10 и 1 ж. ст- ко установтены датчики 23 и 24 обнару жения сгеб.тя соответст иеннг).
Листоотде.тяюццп механизм 22 ныио.тнег; в виде двух симметрична) ()жeнны но отношению д)уг к частчч, с(.)ст чя1цих из размеп1енных над .ipyr(v.i м закрепдругой частей, состоящих из размещенных друг над другом и закрепленных на кронштейнах 20 и 21 датчиков контакта стебля, ножа, датчика листа, вакуумного захвата. В момент расположения стебля растения в плоскости действия датчиков 23 и 24 подается сигнал в блок управления, и каретка 3 начинает перемещаться со скоростью агрегата, но в обратном наиравлении. Одновременно происходит срабатывание устройств го)изонтального перемещения 14 и 15. После касания датчиков контакта со стеблем растения осуществляются смыкание листоот- деляипцего механизма 22 и отделение листьев с дальнейшей их ориентированной ук- .тадкой в накопитель 12. 2 з.п.ф-лы, 5 ил.
;1ен1Н:.гч на кропп тейнах 20 и 21 датчиков 25 и 26 контакта стебля, ножа 27, выпол- пенного в виде двух, охватывающих стебель, полуколец, датчика 28 обнаружения листа
5 (naiii)HMep, тактильного с .магнитоуправляе- мыми контактами), а также вакуумного захвата 29, состоящего из двух охватывающих cie6e;ib, конических поверхностей с присосками 30 и всасывающими каналами.
Вакуумный захват 29 жестко кре1щтся
0 к звену .31, коюрое и арнирно через ось 32 соединено с новоротным корпусом 33. Звено 31 унравляется подвижным подпружиненным iiopoM 34 посредством неподвижного копира ;5. Поворот корпуса 33 осущесгвляется вокруг гюлуоси 36 подпружииенной рейкой 37
5 при взаимодействии с упорами 38 и 39, рас- ,тоже и1ыми на траверсах И) и II. Блок управ.тения устройства не показан.
. работает следуюци1м об()азом. Нри движении вдо, 1Ь рядов табачных расд геиий с юстоянной скоростью У исходное ио. южение каретки 3 к 1айпе левое. С момен- la попадания стебля растения п плоскость /ич и твия датчиков 23 и 24 обнарл жения стеб- .тя, один из кото)ых (23) яв.тяегся из, 1у- чате.тем сиетово1 о ното1;а, другой (24) - - фо
5 юдиодом, иодаегся сигна„т в б,ток уп|)ав, нмянаретка 3 начинает двигаться со
CK(j|)ocTbKi агрс1 ата У. но в обратном направлении. При этом иодвен1енпые к ка)ет- кс траис рсы 10 и 11 остан)тся неиодвиж- HiiivH (Л носи гельно обрабатываемогс; расте0 ния. Одновременно с запуском каретки 3 поступает команда на сближение устройств И и 15 г()изонтальпого переме цепия. (л /.т.11жеппе происходит до касания каждого из датчиков 25 со стеблем расте 1ия, после
5
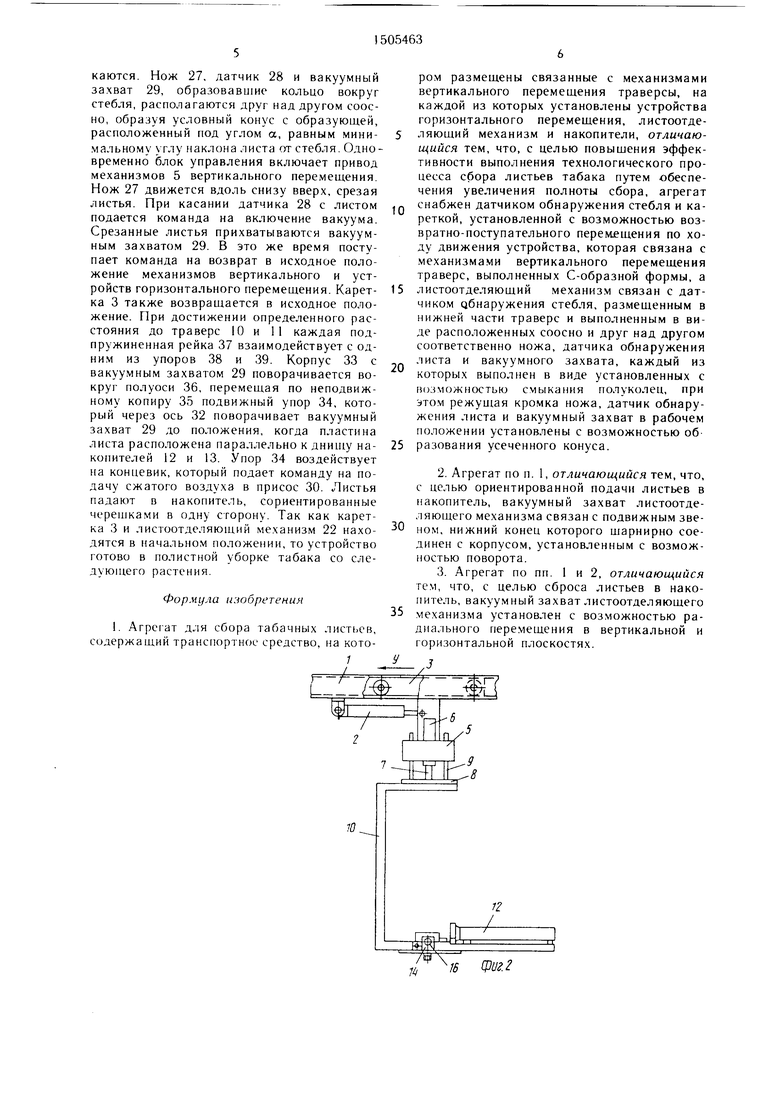
4LM4) юдает ся сигаал в блок управления, поступает команда на ск танов устройств 14 и 15 г(;ризонтального перемещения. С.имметричпо рас1И).тоженпые части .т стоот Д(.-.тяюп1его механизма 22 смыкаются. Нож 27, датчик 28 и вакуумный захват 29, образовавшие кольцо вокруг стебля, располагаются друг над другом соос- но, образуя условный конус с образующей, расположенный под углом а, равным минимальному углу наклона листа от стебля. Одновременно блок управления включает привод механизмов 5 вертикального перемещения. Нож 27 движется вдоль снизу вверх, срезая листья. При касании датчика 28 с листом подается команда на включение вакуума. Срезанные листья прихватываются вакуумным захватом 29. В это же время поступает команда на возврат в исходное положение механизмов вертикального и устром размещены связанные с механизмами вертикального перемещения траверсы, на каждой из которых установлены устройства горизонтального перемещения, листоотде5 ляющий механизм и накопители, отличающийся тем, что, с целью повыщения эффективности выполнения технологического процесса сбора листьев табака путем обеспечения увеличения полноты сбора, агрегат
.„ снабжен датчиком обнаружения стебля и кареткой, установленной с возможностью возвратно-поступательного перем ещения по ходу движения устройства, которая связана с механизмами вертикального перемещения траверс, выполненных С-образной формы, а
ройств горизонтального перемещения. Карет- 15 листоотделяющий механизм связан с дат- ка 3 также возвращается в исходное поло-чиком обнаружения стебля, размещенным в
жение. При достижении определенного расстояния до траверс 10 и 11 каждая подпружиненная рейка 37 взаимодействует с одним из упоров 38 и 39. Корпус 33 с вакуумным захватом 29 поворачивается вокруг полуоси 36, перемещая по неподвижному копиру 35 подвижный упор 34, который через ось 32 поворачивает вакуумный захват 29 до положения, когда пластина листа расположена параллельно к днищу накопителей 12 и 13. Упор 34 воздействует на концевик, который подает команду на подачу сжатого воздуха в присос 30. Листья падают в накопитель, сориентированные черешками в одну сторону. Так как каретка 3 и листоотделяющий механизм 22 находятся в начальном положении, то устройство готово в полистной уборке табака со следующего растения.
Формула изобретения
. Агрег ат д;1Я сбора табачных листьев, содержащий транспортное средство, на кото/
20
25
30
35
нижней части траверс и выполненным в виде расположенных соосно и друг над другом соответственно ножа, датчика обнаружения листа и вакуумного захвата, каждый из которых выполнен в виде установленных с возможностью смыкания полуколец, при этом режущая кромка ножа, датчик обнаружения листа и вакуумный захват в рабочем положении установлены с возможностью образования усеченного конуса.
- J
ром размещены связанные с механизмами вертикального перемещения траверсы, на каждой из которых установлены устройства горизонтального перемещения, листоотделяющий механизм и накопители, отличающийся тем, что, с целью повыщения эффективности выполнения технологического процесса сбора листьев табака путем обеспечения увеличения полноты сбора, агрегат
снабжен датчиком обнаружения стебля и кареткой, установленной с возможностью возвратно-поступательного перем ещения по ходу движения устройства, которая связана с механизмами вертикального перемещения траверс, выполненных С-образной формы, а
0
5
0
5
нижней части траверс и выполненным в виде расположенных соосно и друг над другом соответственно ножа, датчика обнаружения листа и вакуумного захвата, каждый из которых выполнен в виде установленных с возможностью смыкания полуколец, при этом режущая кромка ножа, датчик обнаружения листа и вакуумный захват в рабочем положении установлены с возможностью образования усеченного конуса.
- J
38 31 го }s
28 ±- fV ,,
-r/z/
.J
г /5 Л/5 27 }g
25 26
сриг.
35 //J7M
.JJ
| Табакоуборочный комбайн | 1983 |
|
SU1130231A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
