3150
Изобретение относится к горному делу и может быть использовано в системе автоматизированного управления гидрофицированными крепями, секционным орошением в струговых лавах и т.п
Целью изобретения является повышение помехозащищенности устройства за счет введения силового контура.
На фиг.1 изображен датчик, общий В1-щ{ на фиг. 2 - разрез А-А на фиг. 1 j на фиг. 3 - вид Б на фиг.2.
Датчик включает каретку 1, перемещающуюся по круглой направляющей 2 горной машины, гидрораспределитель (гидроклапан) 3, упругий элемент, например, гидропатрон 4, толкатель 5, воспринимающий элемент 6, выполненный в виде стакана с выпуклым дном, направляющую 7. Элементы 3-7 датчика смонтированы на плите 8, которая в свою очередь крепится на кронштейне забойного конвейера таким образом, чтобы каретка 1 при ее перемещении по круглой направляющей 2 горной машины взаимодействовала через воспринимающий элемент и толкатель с гидропатроном А и гидроклапаном 3.
Датчик перемещения горной машины работает следующим образом.
Угледобывающий комбайн при своем движении, например с помощью цепи или тяги на определенном расстоянии от себя, перемещает каретку 1. Это расстояние определяется исходя из того, что автоматически перемещается секция, напротив которой в данный момент находится каретка 1. При взаимодействии каретки 1 с воспринимающим элементом 6 последний, преодолевая сопротивление гидропатрона А, перемещается и толкателем 5 открывает
135
0
гидроклапан 3, на вькоде которог о появляется гидравлический сигнап на перемещение секции.
Каретка 1 может быть изготовлена из захвата комбайна за круглую направляющую 2 путем наварки на захват кулачка 9. В качестве круглой направляющей 2 используется направляющая, имеющаяся в комплексе.
В качестве направляющей 7 использован кулак с исполнительного органа очистного комбайна.
Предлагаемьп1 датчик по сравнению с известными не реагирует на наличие в лаве кусков породы и угля, благодаря гшлропатрону 4 Кроме того, в предлагаемом датчике отсутствуют узлы, проложенные вдоль всей лавы (монорельсов, гибких лент, цепей). Использование в датчике круглой направляющей комплекса делает его конструкцию единой с конструкцией комплекса.
Формул
изобретения
Датчик перемещения горной машины, включающий воспринимающий элемент с направляющей, гидрораспределитель и
каретку с элементом для взаимодействия с воспринимающим элементом, отличающийся тем, что, с целью повьш1ения помехозащищенности за счет введения силового контура, воспринимающий элемент выполнен в виде стакана с выпуклым дном, внутри которого размещен упругий элемент, при этом стакан установлен в направляющей с возможностью прямолинейного перемещения и возможностью взаимодействия с гидрораспределителем посредством толкателя, жестко закрепленного в дне стакана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фронтальный очистной агрегат | 1981 |
|
SU1036920A2 |
| КОМПЛЕКС ДЛЯ ВЫЕМКИ УГЛЯ ТОНКИХ И СРЕДНЕЙ МОЩНОСТИ КРУТЫХ И КРУТОНАКЛОННЫХ ПЛАСТОВ | 1991 |
|
RU2006580C1 |
| АГРЕГАТ СТРУГОДОСТАВОЧНЫЙ, СТАВ СТРУГОДОСТАВОЧНОГО АГРЕГАТА, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ НАПРАВЛЯЮЩИХ, АГРЕГАТНАЯ КРЕПЬ, ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДХВАТА ПРИЗАБОЙНОЙ КРОВЛИ, ОПОРНАЯ БАЗА КОЛЬЦЕВОГО СТРУГА | 2000 |
|
RU2182668C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА ДЛЯ ДОБЫЧИ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2463450C1 |
| Фронтальный очистной агрегат | 1980 |
|
SU926276A2 |
| Выемочный комплекс для крутых пластов | 1980 |
|
SU1021787A1 |
| Устройство для шагового перемещения горной машины | 1979 |
|
SU863879A1 |
| Механизированная крепь | 1985 |
|
SU1271977A1 |
| Струговая установка | 1989 |
|
SU1754895A1 |
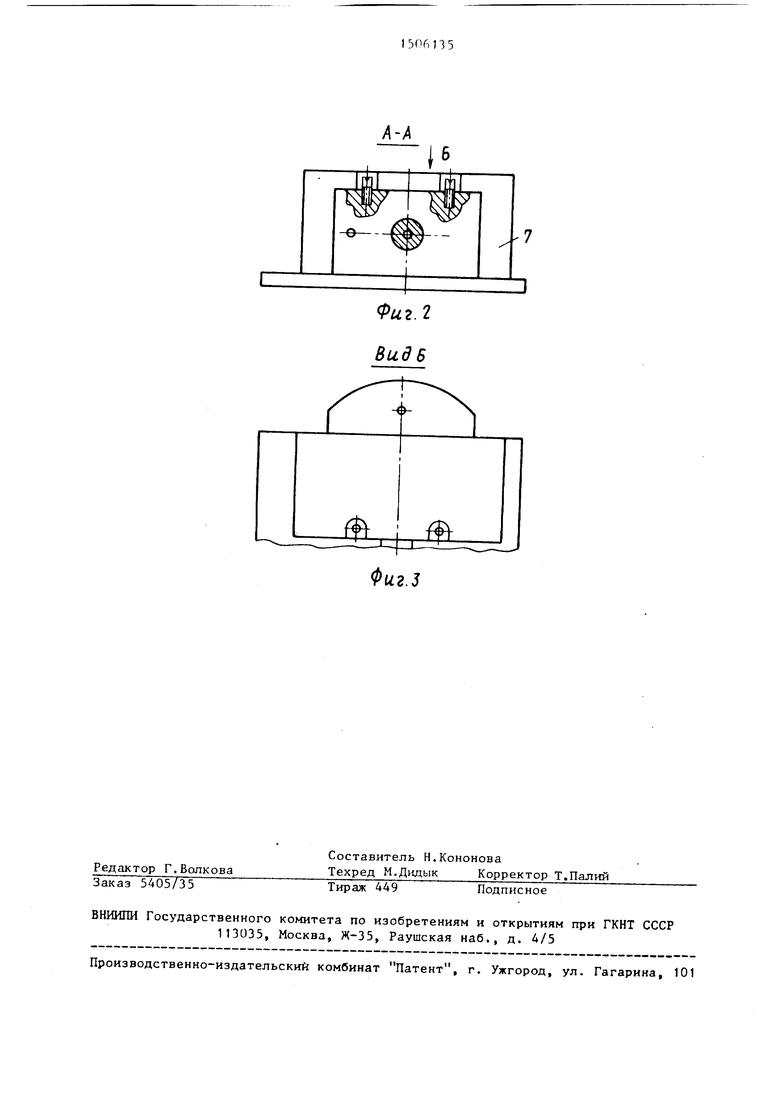
Изобретение относится к горному делу и может быть использовано в системе автоматизированного управления гидрофицированными крепями, секционным орошением в струговых лавах и т.п. Цель - повышение помехозащищенности устройства за счет введения силового контура. Для этого воспринимающий элемент (ВЭ) 6 датчика выполнен в виде стакана с выпуклым дном. Внутри стакана размещен упругий элемент (гидропатрон) 4. ВЭ 6 установлен в направляющей 7 с возможностью прямолинейного перемещения и взаимодействия с гидрораспределителем (гидроклапан) 3 посредством толкателя 5, жестко закрепленного в дне стакана. По круглой направляющей 2 горной машины перемещается каретка 1, которая взаимодействует с ВЭ 6. Последний, преодолевая сопротивление гидропатрона 4, перемещается и толкателем 5 открывает гидрораспределитель 3. На его выходе появляется гидравлический сигнал на перемещение секции. Датчик не реагирует на наличие в лаве кусков породы и угля благодаря гидропатрону 4. Круглая направляющая 2 комплекса делает конструкцию датчика единой с конструкцией комплекса. 3 ил.
Фиг.З
| МЕХАНИЧЕСКИЙ ОПЕРАТОР ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СЕКЦИЯМИ МЕХАНИЗИРОВАННЫХ КРЕПЕЙ | 0 |
|
SU376578A1 |
