Изобретение относится к приборо- .строению и может быть использовано для ,контроля качества изготовления и сборки, а также режимов работы подшипниковых узлов различных приборов.
Целью изобретения является расширение области применения путем осуществления неразрушающего контроля окончательно собранных узлов.
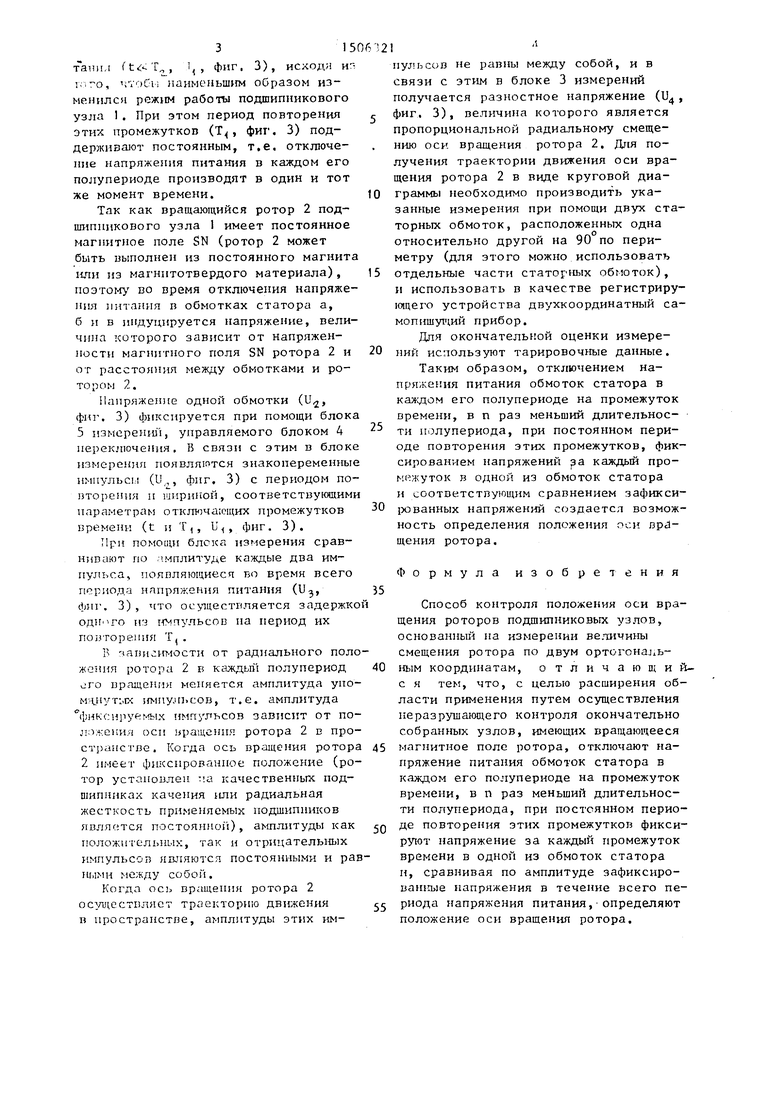
На фиг. 1 показан исследуемый подшипниковый узел; на фиг. 2 - функциональная схема для осуществления способа} на фиг, 3 - временные диаграммы сигналов соответствующих блоков функциональной схемы.
Функциональная схема для реализации предлагаемого способа содержит подшипниковый узел 1, имеющий вра
щающийся ротор 2 с магнитным полем SN, статорные обмотки а, б, в (фиг. 1), источник 3 питания, блок
4переключения, блок 5 измерений (фиг. 2), причем источник 3 питания подключен к блоку 4 переключения, который соединен с блоком 5 измерений и статорными обмотками а, б и в, которые подключены также к блоку
5измерений.
Способ реализуется следующим об- Разом.
При помощи блока 4 переключения отключают на промежутки времени напряжение питания статорных обмоток а, бив. Длительность этих промежутков подбирают в п раз меньше длительности- полупериода напряжения пиел
о о
Од
to
315
т анил , i , фиг. 3), исходя i.i-o, 47oCii наименьшим образом изменился режим работы подшипникового узла 1. При этом период повторения этих промежутков (Т, фиг. 3) под- держинают постоянным, т.е. отключение напряжения питания в каждом его полупериоде производят в один н тот же момент времени.
Так как вращающийся ротор 2 подшипникового узла 1 имеет постоянное магнитное поле SN (ротор 2 может быть выполнен из постоянного магнита или из магнитотвердого материала), поэто1-г во время отключения напряжения питания в обмотках статора а, бив индуцируется напряжение, величина которого зависит от напряженности магнитного поля SN ротора 2 и от расстояния между обмотками и ротором 2.
Напряжение одной обмотки (U, фиг. 3) фиксируется при помощи блока 5 иэмеренш, управляемого блоком 4 переключения, В связи с этим в блоке измере ип появляются знакопеременные импульсм (и.,, фпг. 3) с периодом повторения и шириной, соответствующими параметрам откл1 1ча сщих промежутков времени (t и Т,, Ь , фиг. 3).
При помощи блока измерения сравнивают по амплитуде каждые два импульса, появляющиеся во время всего периода напряжения питания (U, фпг. 3), что осуществляется задержко одного из импульсов на период их noi3TopeiiHH Tj .
В зависимости от радиального положения ротора 2 в каждый полупериод го вращегшя меняется амплитуда упо- M UiyTi.ix гмпульсов, т.е. амплитуда фиксируег-Фич импульсов зависит от по- . жения оси вращенпя ротора 2 в пространстве. Когда ось вра1цения ротора 2 имеет фиксированное положение (ротор установлен -.la качественных подшипниках или радиальная жесткость применяемых подшипников является постоя.нной), амплитуды как положительных, так и отридателыдах импульсов являются постоянными и равными между собой.
Когда ос1з вращения ротора 2 ос дцсствляет траекторию дви;кения в пространстве, амплитуды этих импульсов не равны между собой, и в связи с этим в блоке 3 измерений полу 1ается разностное напряжение (U , фиг. 3), величина которого является пропордиональной радиапьному смещению оси вращения ротора 2. Для получения траектории движения оси вращения ротора 2 в виде круговой диаграммы необходимо производить ука- занпые измерения при помощи двух ста- торных обмоток, расположенных одна относительно другой на 90 по периметру (для этого можно использовать отдельные части статорш 1х обмоток), и использовать в качестве регистрирующего устройства двухкоординатный са- мопишуг1ий прибор.
Для окончательной оценки измерений используют тарировочные данные.
Таким образом, отключением напряжения питания обмоток статора в калуцом его полупериоде на промежуток времени, в п раз меньший длительности полупериода, при постоянном периоде повторения этих промежутков, фиксированием напряжений а каждый промежуток в одной из обмоток статора и соответствующим сравнением зафикси- 1Х)ванных напряжений с(;здаетсл возможность определения положения оси вращения ротора.
Формула изобретения
Способ контроля положения оси вращения роторов подшипниковых узлов, основанный на измерении величины смещения ротора по двум opToroHajib- №iM координатам, отличающий с я тем, что, с целью расширения области применения путем осуществления неразрушающего контроля окончательно собранных узлов, имеющих вращающееся магнитное поле ротора, отключают напряжение питания обмоток статора в каждом его полупериоде на промежуток времени, в п раз меньший длительности полупериода, при постоянном периоде повторения этих промежутков фиксируют напряжение за каждый промежуток времени в одной из обмоток статора и, сравнивая по амплитуде зафиксированные напряжения в течение всего периода напряжения питания, определяют положение оси вращения ротора.
Фиг.1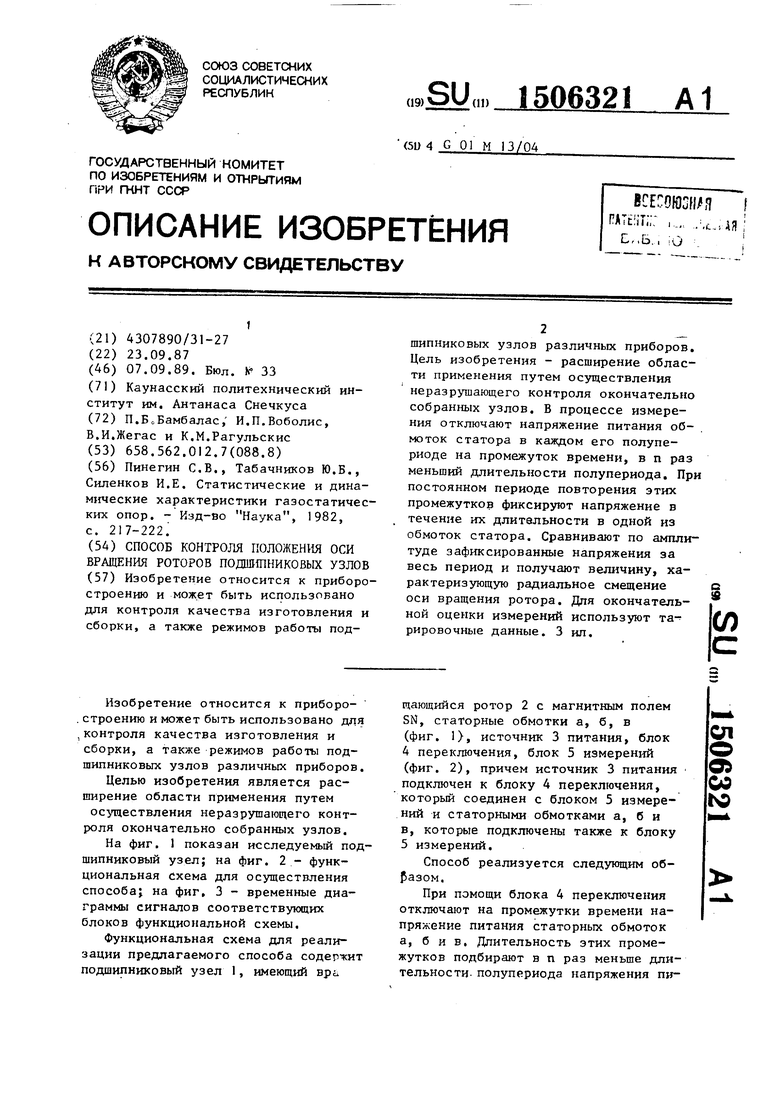
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перевозбуждения гистерезисного электродвигателя | 1988 |
|
SU1647838A1 |
| Способ контроля подшипников трехфазной электрической машины | 1983 |
|
SU1117750A1 |
| Устройство для косвенного контро-ля НЕРАВНОМЕРНОСТи ВОздушНОгО зАзОРАэлЕКТРичЕСКиХ ВРАщАющиХСя МАшиН | 1979 |
|
SU813603A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ КОЛОНКОВЫЙ БУРОВОЙ СНАРЯД | 2007 |
|
RU2337225C1 |
| СПОСОБ ПОВЫШЕНИЯ НАДЕЖНОСТИ РАБОТЫ ЦЕНТРОБЕЖНОГО ПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА УГЛЕВОДОРОДНОГО СЫРЬЯ И СИСТЕМА ДИАГНОСТИРОВАНИЯ ЕГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ | 2007 |
|
RU2360148C1 |
| Бесконтактный электродвигатель | 1989 |
|
SU1674327A1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Устройство для проведения лабораторных работ по электротехнике | 1984 |
|
SU1211799A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ С МНОГОПРОФИЛЬНЫМ МНОГОСЕКЦИОННЫМ СКОЛЬЗЯЩИМ РОТОРОМ | 2018 |
|
RU2711052C1 |
| Устройство для питания вращающихся тензорезистивных цепей | 1982 |
|
SU1081567A1 |

Изобретение относится к приборостроению и может быть использовано для контроля качества изготовления и сборки, а также режимов работы подшипниковых узлов различных приборов. Цель изобретения - расширение области применения путем осуществления неразрушающего контроля окончательно собранных узлов. В процессе измерения отключают напряжения питания обмоток статора в каждом его полупериоде на промежуток времени, в N раз меньший длительности полупериода. При постоянном периоде повторения этих промежутков фиксируют напряжение в течение их длительности в одной из обмоток статора. Сравнивают по амплитуде зафиксированные напряжения за весь период и получают величину, характеризующую радиальное смещение оси вращения ротора. Для окончательной оценки измерений используют тарировочные данные. 3 ил.
U2.Z
| Пинегин С.В., Табачников Ю.Б., Силенков И.Е | |||
| Статистические и динамические характеристики гаэостатичес- ких опор | |||
| - Кзд-во Наука, 1982, с | |||
| Искусственный двухслойный мельничный жернов | 1921 |
|
SU217A1 |
