Изобретение относится к.электротехнике к может быть использовано для регулирования угловой скорости многоскоростных асинхронных электродвигателей, с короткозамкнутым ротором и независимыми статорными обмотками.
Цель изобретения - упрощение за счет логически функционального выполнения в электроприводе датчика частоты вращения о
На фиг.1 представлена функциональная схема электропривода; на фиг.2 - блок формирования импульсов; на фиг.З - блок импульсно-фазового управления.
Регулируемый электропривод (фиг.1) содержит двухскоростной асинхронный электродвигатель 1 с двумя независимыми статорными обмотками, выводы которых подключены соответственно к тиристорному преобразователю 2 напряжения и управляемому выпрямителю 3, управляющие входы которых соединены с блоком 4 импульсно-фазового управления, блок 5 задания уровня управляющего сигнала и последовательности работы тиристорного преобразователя 2 напряжения и управляемого выпрямителя 3 с тремя выходами, соединенными с соответствующими входами блока 4 импульсно-фазового управления, датчик 6 частоты вращения в виде логически функционального блока, составленный Из двух блоков 7 и 8 формирования импульсов, блока 9 переключений, блока JO формирования сигнала запрета, блока 11 формирования интервала измерения, блока 42 контроля последовательности чередования фаз измеряемых сигналов, блока 13 измерения сигнала - частоты вращения и блока 14 коррекции результата измерения частоты вращения, при этом блоки 7 и 3 формирования импульсов входами соединены соответственно с выводами статорных обмоток асинхронного электродвигателя 1, а выходами подключены к блоку 9 переключений, два вторых входа которого соединены с выходами 15 и 16 блока 5 задания, определяющими последовательность работы тиристорного преобразователя 2 и управляемого выпрямителя 3, а выход соединен с первым входом блока I1 формирования интервала измерения и через блок 12 контроля последовательности чередования фаз измеряемых сигналов с вторым входом блока И формирования интерва
5
0
5
0
5
0
45
50
55
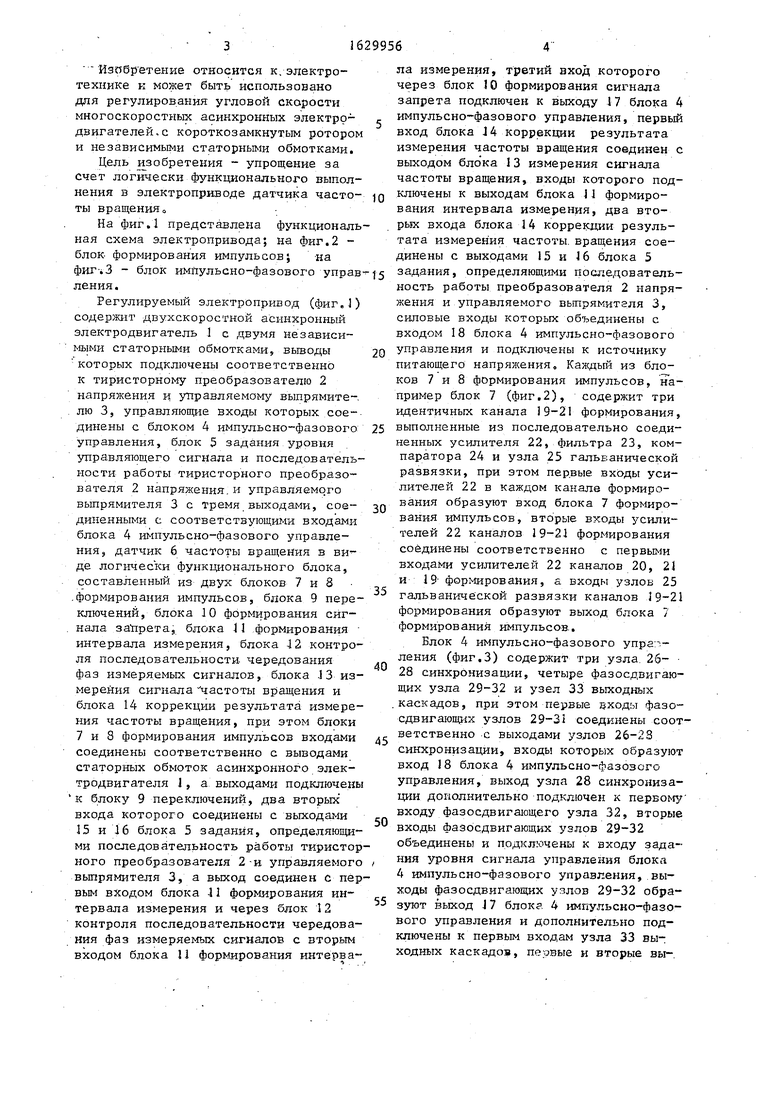
ла измерения, третий вход которого через блок 10 формирования сигнала запрета подключен к выходу 47 блока 4 импульсно-фазового управления, первый вход блока J4 коррекции результата измерения частоты вращения соединен с выходом блока 13 измерения сигнала частоты вращения, входы которого подключены к выходам блока I формирования интервала измерения, два вторых входа блока 14 коррекции результата измерения частоты вращения соединены с выходами 15 и 16 блока 5 задания, определяющими последовательность работы преобразователя 2 напряжения и управляемого выпрямителя 3, силовые входы которых объединены с входом 18 блока 4 импульсно-фазового управления и подключены к источнику питающего напряжения. Каждый из блоков 7 и 8 формирования импульсов, например блок 7 (фиг.2), содержит три идентичных канала 19-21 формирования, выполненные из последовательно соединенных усилителя 22, фильтра 23, компаратора 24 и узла 25 ГЗЛЬЕанической развязки, при этом первые входы усилителей 22 в каждом канале формирования образуют вход блока 7 формирования импульсов, вторые входы усилителей 22 каналов 19-21 формирования соединены соответственно с первыми входами усилителей 22 каналов 20, 21 и 19 формирования, а входы узлоь 25 гальванической развязки каналов 19-21 формирования образуют выход блока 7 формирования импульсов.
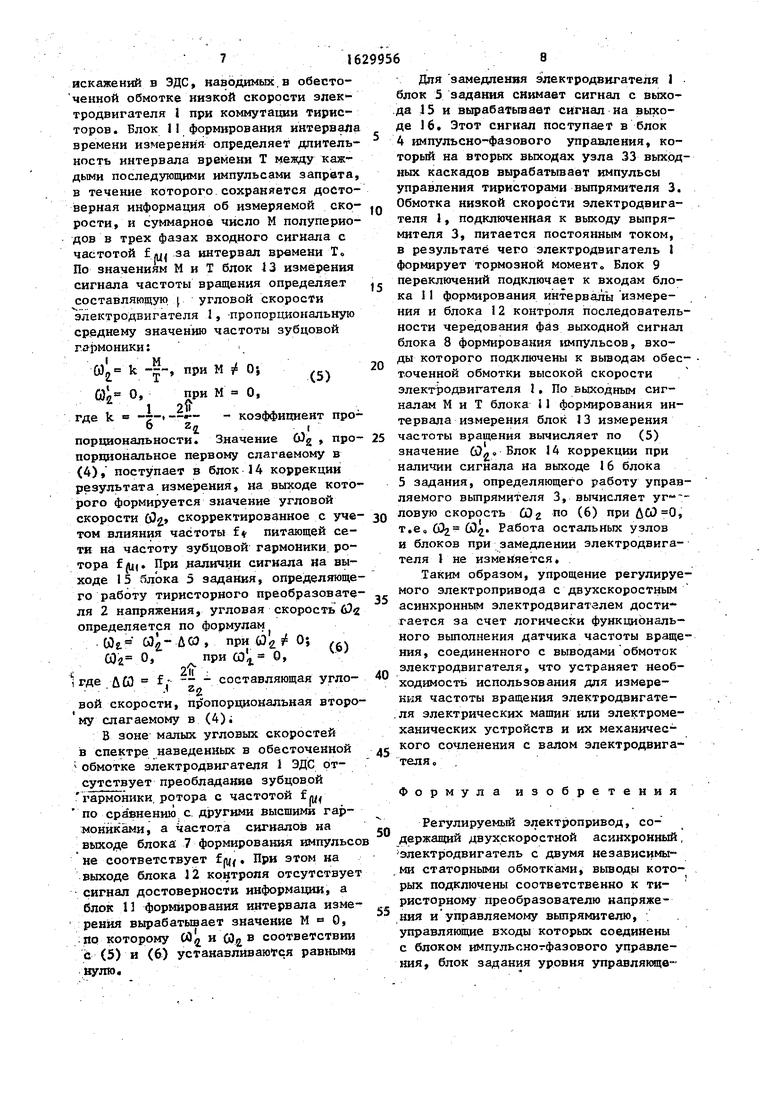
Блок 4 импульсно-фазового упрал- ления (фиг.З) содержит три узла 26- 28 синхронизации, четыре фазосдвигаю- щих узла 29-32 и узел 33 выходных каскадов, при этом первые входы фазо- сдвигающих узлов 29-31 соединены соответственно с выходами узлов 26-23 синхронизации, входы которых образуют вход 18 блока 4 импульсно-фазозого управления, выход узла 28 синхронизации дополнительно подключен к первому входу фазосдвигающего узла 32, вторые входы фазосдвигающих узлов 29-32 объединены и подключены к входу задания уровня сигнала управления блока 4 импульсно-фазового управления, выходы фазосдвигающих учлов 29-32 образуют выход J 7 блок 4 импульсно-фазового управления и дополнительно подключены к первым входам узла 33 выходных каскадов, п jBbie и вторые выгде
-n +
i L
Z2. ,
«k.
0-s)
i
CD
z - число пар полюсов ротора;
р - число полюсов рабочей обмотки;
S - скольжение;
f - частота питающей сети;
kg,- целое число,
причем максимальную амплитуду в спектре ЭДС имеют гармоники первого по10
15
20
51629956
ходы которого образуют соответственно выходы управления тиристорным преобразователем 2 напряжения и управляемым выпрямителем 3 блока 4 им- пульсно-фазового управления, входы которого, определяющие последовательность работы преобразователя 2 напряжения и управляемого выпрямителя. 3, соединены с вторым и третьим входами узла 33 выходных каскадов.
Регулируемый электропривод работает следующим образом.
Для разгона электродвигателя J блок 5 задания формирует требуемый уровень сигнала управления и на выходе 15 - сигнал, определяющий работу тиристорного преобразователя 2 напряжения„ Эти сигналы поступают в блок 4 импульсно-фазово о управления, который на первых выходах узла 33 выходных каскадов вырабатывает импульт сы управления тиристорами преобразователя 2 напряжения. Сдвиг импульсов управления на угол оЈ относительно нулей соответствующих фазных напряжений питающей сети, определяемых узлами 26-28 синхронизации, осуществляется фазосдвигающими узлами 29-31. Угол 0Ј сдвига определяется уровнем сигнала управленияs изменение которого приводит к изменению величины переменного напряжения, подводимого к обмотке высокой скорости электродвигателя 1, В обесточенной обмотке низкой скорости электродвигателя 1 отсутствует ЭДС поля рабочей гармо- ники, поскольку электрические оси обмоток с различным числом полюсов сдвинуты на 90°, а наводятся ЭДС высших гармоник, в спектре которых преобладают ЭДС зубцовых гармоник ротора Частота f«j ЭДС, наводимых этими гармониками в статорных обмотках, определяется выражением
гд
из ро
в об ны си ЭД ти бл ды из ку зу ны си
25 на вх д го то
30 си ня Бл хо вы им в к в 12
д5 м
50 н в р т н
55 т д уп те к
35
40
рядка, частота ется из (1)
i ч Ј
1 S 63,
:(U)
при
которых определя- о Учитывая, что
(2)
10
15
20
ZVi,
(и, -
(3)
1Р
где С0 - угловая скорость магнитного
поля;
tui - угловая скорость ротора, из (1) можно определить угловую скорость двигателя
«i- . 1 - -Ч-г «
ЭДС с частотой f «у, , наведенные в каждой фазе трехфазной обмотки, образуют трехфазную систему переменных напряжений, сдвинутых одно относительно другого на 120°. Сигналы ЭДС с выводов обмотки низкой скорости электродвигателя I поступают в блок 7 формирования импульсов, каждый из трех каналов которого выделяет из входного сигнала зубтювую гармонику ротора с частотой fлд и преобразует гармонический сигнал в импульсный. Усилитель 22 усиливает входной сигнал, Формирование импульсного сиг25 нала осуществляет компаратор 24, на вход которого поступает сигнал с выхода полосового фильтра 23, настроенного на рабочий диапазон изменения частоты f/u(. Гальваническое разделение
30 силовой цепи от цепи управления выполняет узел 25 гальванической ратвязки, Блок 9 переключения по сигналу с выхода 15 блока 5 задания подкгючает выходной сигнал блока 7 формирования импульсов к входам блока 11 йормиро- вания, интервала измерения и блока 12 контроля последовательности чередования фаз измеряемых сигналов. Блок 12 контроля осуществляет проверку достоверности информации, используемой для измерения скорости, т.е„ проверку соответствия частоты выходного сигнала блока 7 формирования импульсов и частоты f у зубцовсй гард5 моники ротора. Контроль достоверности информации осуществляется путем контроля последовательности чередования фаз входного сигнала. достоверности информации поступает
50 на вход блока 11 формирования интервала измерения, на другой вход которого подается сигнал запрета, вырабатываемый блоком 10 формирования сигнала запрета в виде последовательное55 ти импульсов, начало которых совпадает с моментами подачи импульсов управления на тиристоры преобразователя 2 напряжения, а длительность каждого импульса равна длительности
35
40
искажений в ЭДС, наводимых в обесто- ценной обмотке низкой скорости электродвигателя 1 при коммутации тиристоров. Блок II формирования интервала времени измерения определяет длительность интервала времени Т между каждыми последующими импульсами запрета, в течение которого сохраняется достоверная информация об измеряемой скорости, и суммарное число М полупериодов в трех фазах входного сигнала с частотой fщ за интервал времени То По значениям М и Т блок 13 измерения сигнала частоты вращения определяет составляющую (, угловой скорости электродвигателя 1, пропорциональную среднему значению частоты зубцовой гармоники: .1 . М
С0„ k ™, при М Q-,
О,
Ч где k
Q О,
(5)
при М
1 oft
, -.. - коэффициент про6 гг,
порциональности. Значение й)Ј , про- порциональное первому слагаемому в (4), поступает в блок 14 коррекции результата измерения, на выходе которого формируется значение угловой скорости Ј$2 скорректированное с уче том влияния частоты f4 питающей сети на частоту зубцовой гармоники ротора Ј(ц(. При наличии сигнала на выходе 15 блока 5 задания, определяющего работу тиристорного преобразовате- ля 2 напряжения, угловая скорость 63g определяется по формулам(
Wt CdЈ-uC3, приСО О; ,,}
С0г 0, при С0 г О,
i где йй е f; составляющая угло 2л
вой скорости, пропорциональная второ му слагаемому в (4).
В зоне малых угловых скоростей в спектре наведенных в обесточенной
1 обмотке электродвигателя 1 ЭДС отсутствует преобладание зубцовой
гармоники ротора с частотой f
по сравнению с другими высшими гармониками, а частота сигналов на выходе блока 7 формирования импульсо не соответствует f ц. При этом на выходе блока 12 контроля отсутствует сигнал достоверности информации, а блок 11 формирования интервала измерения вырабатывает значение М О, по которому СОд и (Ог в соответствии с (5) и (6) устанавливаются равными нулю.
0
5
Для замедления электродвигателя 1 блок 5 задания снимает сигнал с выхода 15 и вырабатывает сигнал на выходе 16. Этот сигнал поступает в блок
4импульсно-фазового управления, который на вторых выходах узла 33 выходных каскадов вырабатывает импульсы управления тиристорами выпрямителя 3. Обмотка низкой скорости электродвигателя 1, подключенная к выходу выпрямителя 3, питается постоянным током,
в результате чего электродвигатель I формирует тормозной момент Блок 9 переключений подключает к входам блока 11 формирования интервалы измерения и блока 12 контроля последовательности чередования фаз выходной сигнал блока 8 формирования импульсов, входы которого подключены к выводам обес- точенной обмотки высокой скорости электродвигателя 1, По выходным сигналам М и Т блика 11 формирования интервала измерения блок 13 измерения частоты вращения вычисляет по (5) значение (Од. Блок 14 коррекции при наличии сигнала на выходе 16 блока
5задания, определяющего работу управляемого выпрямителя 3, вычисляет
0 ловую скорость С02 по (6) при , т.ед 032 63. Работа остальных узлов и блоков при замедлении электродвигателя 1 не изменяется.
Таким образом, упрощение регулируемого электропривода с двухскоростным асинхронным электродвигателем достигается за счет логически функционального выполнения датчика частоты вращения, соединенного с выводами обмоток электродвигателя, что устраняет необходимость использования для измерения частоты вращения электродвигателя электрических машин или электромеханических устройств и их механического сочленения с валом электродвигателя.
0
5
Формула изобретения
Регулируемый электропривод, содержащий двухскоростной асинхронный, электродвигатель с двумя независимыми статорными обмотками, выводы которых подключены соответственно к ти- ристорному преобразователю напряжения и управляемому выпрямителю, управляющие входы которых соединены с блоком импульсногфазового управления, блок задания уровня управлякяце™
го сигнала и последовательности работы тиристорного преобразователя напряжения и управляемого выпрямителя с тремя выходами, соединенными с со- , ответствующими входами блока импульс- но-фазового управления, датчик частоты вращения , отличающий- с я тем, что, с целью упрощения, датчик частоты вращения выполнен в виде jg логически функционального блока, снабженного двумя блоками формирования импульсов, блоком переключений, блоком формирования сигнала запрета,
подключены к первому и второму входам блока переключений, третий и четвертый входы которого соединены с выходами блока задания уровня управляющего сигнала и последовательности работы тиристорного преобразователя и управляемого выпрямителя, а выход соединен с первым входом блока формирования интервала измерения и через блок контроля с вторым входом блока формирования интервала измерения, третий вход которого через блок формирования сигнала запрета гоединен с
блоком формирования интервала измере- 15 Д°полнительным выходом блока импульсния, блоком контроля последовательности чередования фаз измеряемых сигналов, блоком измерения сигнала частоты вращения и блоком коррекции результата измерения частоты враще- - 20 ния, а блок импульсно-фазового управления снабжен дополнительным выходом, при этом два блока формирования импульсов входами соединены соответственно с выводами статорных обмоток 25 асинхронного двигателя, а выходами
но-фазового управления, а выход через блок измерения сигналов частоты вращения соединен с входом блока коррекции результатов измерения частоты вращения, два других входа которого соединены с выходами блока задания уровня управляющего сигнала и последовательности работы тиристорного преобразователя и управляемого выпрями- теля, выход блока коррекции является выходом датчика частоты вращения.
, jg
9956Ю
подключены к первому и второму входам блока переключений, третий и четвертый входы которого соединены с выходами блока задания уровня управляющего сигнала и последовательности работы тиристорного преобразователя и управляемого выпрямителя, а выход соединен с первым входом блока формирования интервала измерения и через блок контроля с вторым входом блока формирования интервала измерения, третий вход которого через блок формирования сигнала запрета гоединен с
Д°полнительным выходом блока импульсно-фазового управления, а выход через блок измерения сигналов частоты вращения соединен с входом блока коррекции результатов измерения частоты вращения, два других входа которого соединены с выходами блока задания уровня управляющего сигнала и последовательности работы тиристорного преобразователя и управляемого выпрями- теля, выход блока коррекции является выходом датчика частоты вращения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Вентильный электродвигатель | 1979 |
|
SU904135A1 |
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
Изобретение относится к электротехнике. Цель - упрощение конструкции электропривода. Регулируемый электропривод содержит асинхронный двигатель 1 с двумя обмотками статора, которые соответственно подключены к тиристорному преобразователю 2 напряжения и управляемому выпрямителю 3,. Датчик 6 частоты вращения выполнен з виде логически функционального бпока, составленного из формирователей 7 и 8 импульсов, входами соединенных с обмотками статора асинхронного двигателя, а выходом - с блоком 9 переключений, блока 10 формирования сигнала запрета, блока 11 формирования интервала измерения, блока 12 контроля, блока 13 ивмерения сигнала частоты вращения и блока 14 коррекции. Работа датчика основана на выделении в цепях статора зубцовых гармоник ротора при одновременной фильтрации сигналов, вызываемых работой преобразователя 2, Это осущест-1- вляется за счет контроля последова- тельности чередования фаз в блоке 11. 3 ил. i а SS (Л с
Фиг. 2
ss
1
«5
i
Выход /7 л .
фиг.З
| Электропривод переменного тока | 1985 |
|
SU1378002A1 |
| Системы тиристорного управления судовыми и электромеханичмами.-Л.: Судостроение, 1978, с.25-30 | |||
| Aufziige mit geregeltem Drehstro- mantrieb,- Deutsche Fo rder- technik, 1985, Bd.31, S.38-45. | |||
