Изобретение относится к электротехнике, в частности к электродвигателям с вентильным управлением, ведомых напряжением питающей сети, либо генератором стабильной частоты.
Цель изобретения - повышение равномерности вращения и упрощение сборки.
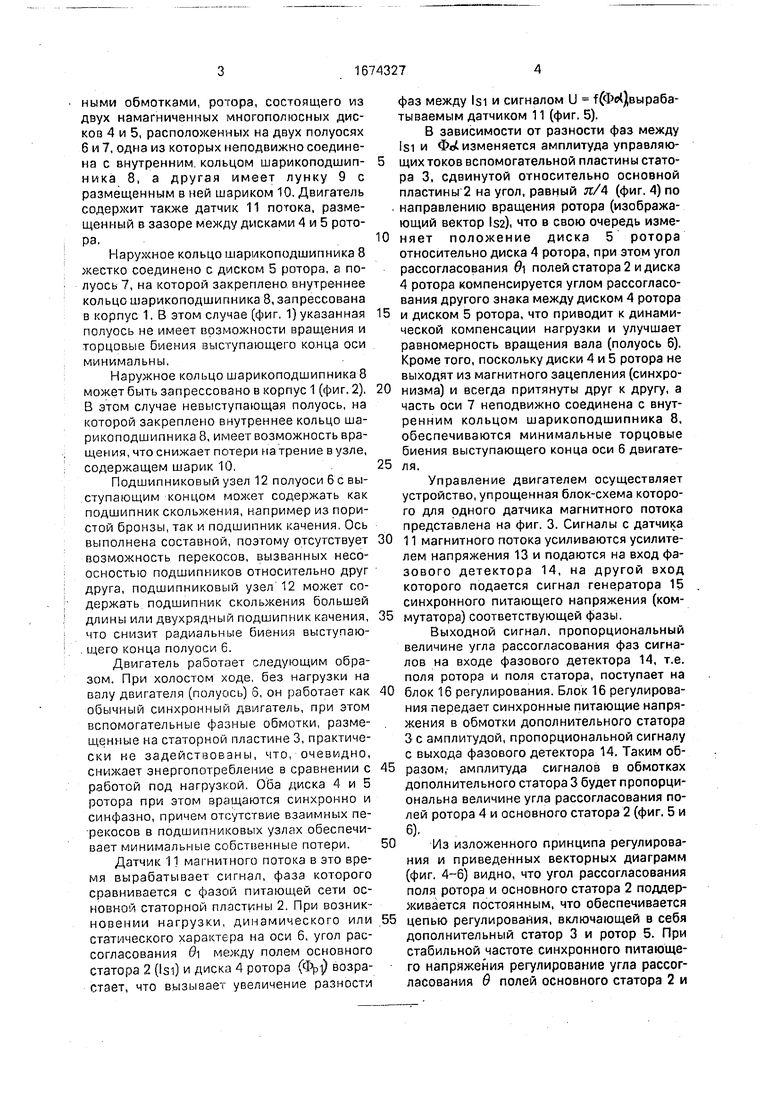
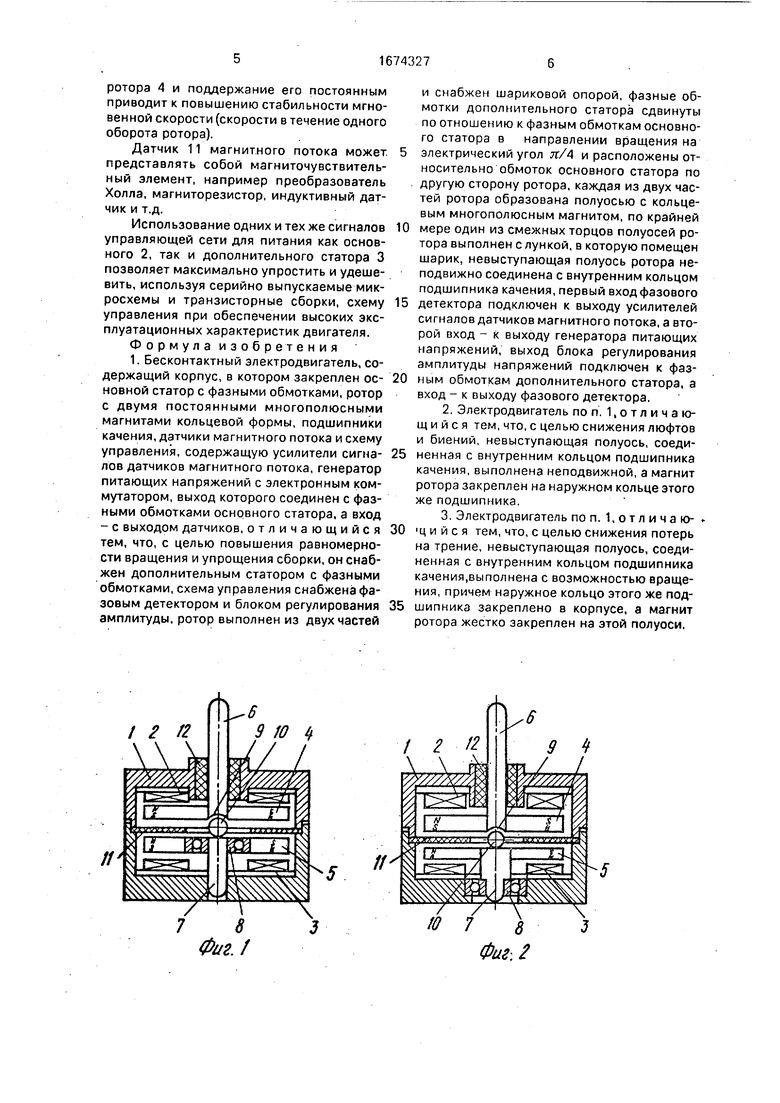
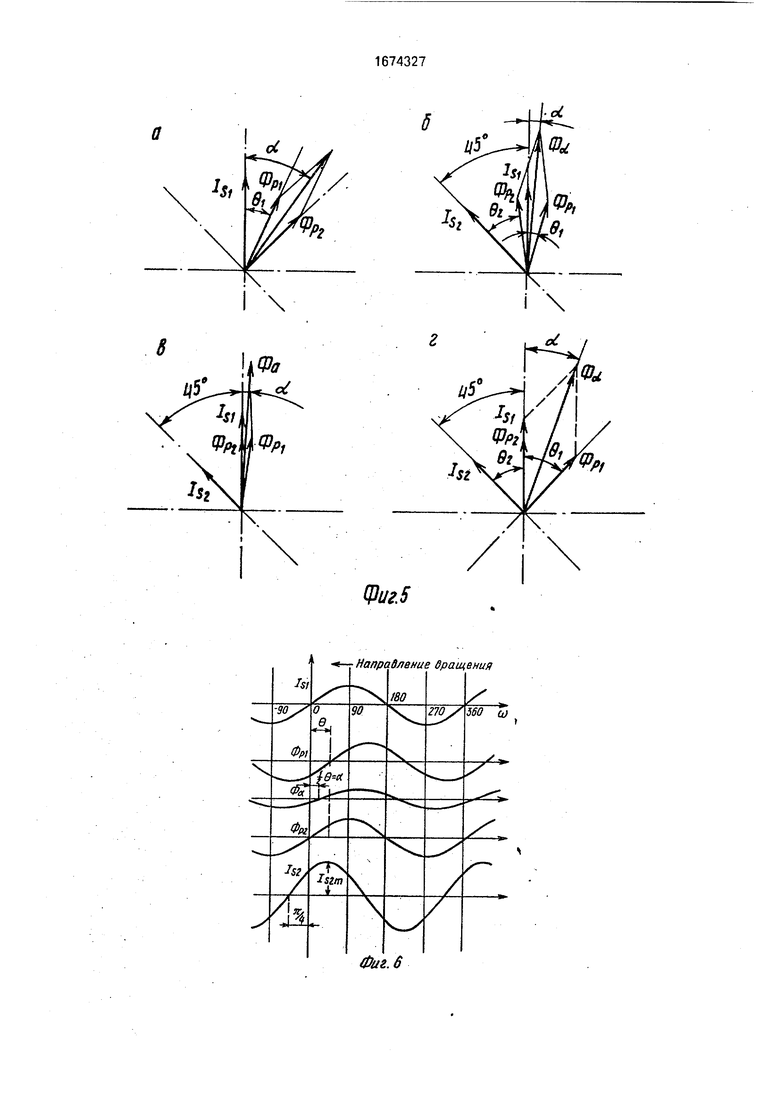
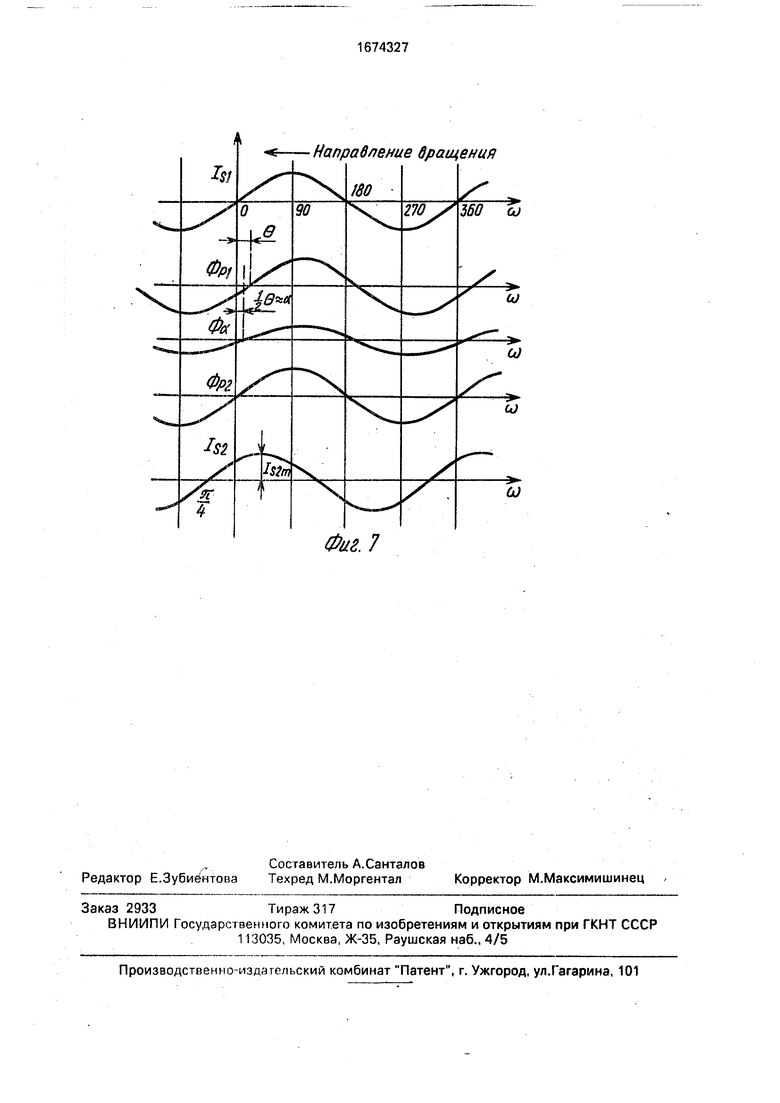
На фиг. 1 - схематично приведен первый вариант конструкции предлагаемого двигателя; на фиг. 2 - второй вариант конструкции; на фиг. 3 - вариант блок-схемы управления; на фиг. 4а, б - векторная диаграмма управляющих токов для 2- и 3- фазного двигателей; на фиг. 5а, б, в, г диаграммы изображающих векторов токов при компенсации угла рассогласования полей основного статора и ротора, вызванного изменением нагрузки на валу двигателя (а, б, в - в различные моменты времени при пуске двигателя, г - при электромеханической мощности, близкой к максимальной); на фиг. 6 и 7 - кривые распределения магнитного поля - развертка векторов пространственной волны потоков при различных нагрузках на валу двигателя.
Бесконтактный двигатель состоит из (фиг. 1, фиг, 2) корпуса 1, основной и вспомогательной плат 2 и 3 статора с фазО
XJ
GJ Ю VI
ными обмотками, ротора, состоящего из двух намагниченных многополюсных дисков 4 и 5, расположенных на двух полуосях 6 и 7, одна из которых неподвижно соединена с внутренним кольцом шарикоподшипника 8, а другая имеет лунку 9 с размещенным в ней шариком 10. Двигатель содержит также датчик 11 потока, размещенный в зазоре между дисками 4 и 5 ротора.
Наружное кольцо шарикоподшипника 8 жестко соединено с диском 5 ротора, а полуось 7, на которой закреплено внутреннее кольцо шарикоподшипника 8, запрессована в корпус 1. В этом случае (фиг. 1) указанная полуось не имеет возможности вращения и торцовые биения выступающего конца оси минимальны.
Наружное кольцо шарикоподшипника 8 может быть запрессовано в корпус 1 (фиг. 2). В этом случае невыступающая полуось, на которой закреплено внутреннее кольцо шарикоподшипника 8, имеет возможность вращения, что снижает потери на трение в узле, содержащем шарик 10.
Подшипниковый узел 12 полуоси 6 с выступающим концом может содержать как подшипник скольжения, например из пористой бронзы, так и подшипник качения. Ось выполнена составной, поэтому отсутствует возможность перекосов, вызванных несоосностью подшипников относительно друг друга, подшипниковый узел 12 может содержать подшипник скольжения большей длины или двухрядный подшипник качения, что снизит радиальные биения выступающего конца полуоси 6.
Двигатель работает следующим образом. При холостом ходе, без нагрузки на валу двигателя (полуось) 6, он работает как обычный синхронный двигатель, при этом вспомогательные фазные обмотки, размещенные на статорной пластине 3, практически не задействованы, что, очевидно, снижает энергопотребление в сравнении с работой под нагрузкой. Оба диска 4 и 5 ротора при этом вращаются синхронно и синфазно, причем отсутствие взаимных перекосов в подшипниковых узлах обеспечивает минимальные собственные потери.
Датчик 11 магнитного потока в это время вырабатывает сигнал, фаза которого сравнивается с фазой питающей сети основной статорной пластины 2. При возникновении нагрузки, динамического или статического характера на оси 6, угол рассогласования 6- между полем основного статора 2 (Isi) и диска 4 ротора (Фр) возрастает, что вызывает увеличение разности
фаз между Isi и сигналом U КФе()выраба- тываемым датчиком 11 (фиг. 5).
В зависимости от разности фаз между Isi и Ф«. изменяется амплитуда управляющих токов вспомогательной пластины статора 3, сдвинутой относительно основной пластины 2 на угол, равный л/4 (фиг. 4) по направлению вращения ротора (изображающий вектор Is2)i что в свою очередь изменяет положение диска 5 ротора относительно диска 4 ротора, при этом угол рассогласования в полей статора 2 и диска 4 ротора компенсируется углом рассогласования другого знака между диском 4 ротора
и диском 5 ротора, что приводит к динамической компенсации нагрузки и улучшает равномерность вращения вала (полуось 6). Кроме того, поскольку диски 4 и 5 ротора не выходят из магнитного зацепления (синхронизма) и всегда притянуты друг к другу, а часть оси 7 неподвижно соединена с внутренним кольцом шарикоподшипника 8. обеспечиваются минимальные торцовые биения выступающего конца оси 6 двигателя.
Управление двигателем осуществляет устройство, упрощенная блок-схема которого для одного датчика магнитного потока представлена на фиг. 3. Сигналы с датчика
11 магнитного потока усиливаются усилителем напряжения 13 и подаются на вход фазового детектора 14, на другой вход которого подается сигнал генератора 15 синхронного питающего напряжения (коммутатора) соответствующей фазы.
Выходной сигнал, пропорциональный величине угла рассогласования фаз сигналов на входе фазового детектора 14, т.е. поля ротора и поля статора, поступает на
блок 16 регулирования. Блок 16 регулирования передает синхронные питающие напряжения в обмотки дополнительного статора 3 с амплитудой, пропорциональной сигналу с выхода фазового детектора 14. Таким образом, амплитуда сигналов в обмотках дополнительного статора 3 будет пропорциональна величине угла рассогласования полей ротора 4 и основного статора 2 (фиг, 5 и 6).
Из изложенного принципа регулирования и приведенных векторных диаграмм (фиг. 4-6) видно, что угол рассогласования поля ротора и основного статора 2 поддерживается постоянным, что обеспечивается
цепью регулирования, включающей в себя дополнительный статор 3 и ротор 5. При стабильной частоте синхронного питающего напряжения регулирование угла рассогласования в полей основного статора 2 и
ротора 4 и поддержание его постоянным приводит к повышению стабильности мгновенной скорости (скорости в течение одного оборота ротора).
Датчик 11 магнитного потока может представлять собой магниточувствитель- ный элемент, например преобразователь Холла, магниторезистор, индуктивный датчик и т.д.
Использование одних и тех же сигналов управляющей сети для питания как основного 2, так и дополнительного статора 3 позволяет максимально упростить и удешевить, используя серийно выпускаемые микросхемы и транзисторные сборки, схему управления при обеспечении высоких эксплуатационных характеристик двигателя.
Формула изобретения
1. Бесконтактный электродвигатель, содержащий корпус, в котором закреплен ос- новной статор с фазными обмотками, ротор с двумя постоянными многополюсными магнитами кольцевой формы, подшипники качения, датчики магнитного потока и схему управления, содержащую усилители сигма- лов датчиков магнитного потока, генератор питающих напряжений с электронным коммутатором, выход которого соединен с фазными обмотками основного статора, а вход - с выходом датчиков, отличающийся тем, что, с целью повышения равномерности вращения и упрощения сборки, он снабжен дополнительным статором с фазными обмотками, схема управления снабжена фазовым детектором и блоком регулирования амплитуды, ротор выполнен из двух частей
и снабжен шариковой опорой, фазные обмотки дополнительного статора сдвинуты по отношению к фазным обмоткам основного статора в направлении вращения на электрический угол л/4 и расположены относительно обмоток основного статора по другую сторону ротора, каждая из двух частей ротора образована полуосью с кольцевым многополюсным магнитом, по крайней мере один из смежных торцов полуосей ротора выполнен с лункой, в которую помещен шарик, невыступающая полуось ротора неподвижно соединена с внутренним кольцом подшипника качения, первый вход фазового детектора подключен к выходу усилителей сигналов датчиков магнитного потока, а второй вход - к выходу генератора питающих напряжений, выход блока регулирования амплитуды напряжений подключен к фазным обмоткам дополнительного статора, а вход - к выходу фазового детектора.
2.Электродвигатель по п. 1,отличающий с я тем, что, с целью снижения люфтов и биений, невыступающая полуось, соединенная с внутренним кольцом подшипника качения, выполнена неподвижной, а магнит ротора закреплен на наружном кольце этого же подшипника
3.Электродвигатель по п. 1,отличаю- сц и и с я тем, что, с целью снижения потерь на трение, невыступающая полуось, соединенная с внутренним кольцом подшипника качения,выполнена с возможностью вращения, причем наружное кольцо этого же подшипника закреплено в корпусе, а магнит ротора жестко закреплен на этой полуоси,
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2653725C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
| ДИСКОВОЕ УНИВЕРСАЛЬНОЕ МОТОР-КОЛЕСО СМИРНОВА | 1995 |
|
RU2129964C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| Многосекционный двигатель постоянного тока с кольцевыми скользящими контактами | 2017 |
|
RU2667889C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Электрический двигатель для транспортных средств | 2021 |
|
RU2774121C1 |
Изобретение относится к электротехнике, в частности к синхронным электродвигателям с вентильным управлением. Целью изобретения является повышение равномерности вращения и упрощение сборки. Электродвигатель, содержащий корпус 1, основную плату 2 статора с фазными обмотками, ротор с двумя постоянными многополюсными магнитами 4 и 5 кольцевой формы, подшипник 8 качения, датчик 11 магнитного потока и схему управления, содержащую усилители сигналов датчиков магнитного потока, генератор с электронным коммутатором, соединенным с фазными обмотками основного статора. Он содержит также дополнительную плату 3 статора с фазными обмотками, сдвинутыми по отношению к фазным обмоткам основного статора в направлении вращения на угол φ/4 электрических радиан и расположенными относительно обмоток основного статора по другую сторону ротора, ротор выполнен из двух частей, не связанных механически. В схему управления введены фазовый детектор, первые входы которого подключены к выходам усилителей сигналов датчиков 11 магнитного потока, а вторые входы - к соответствующим выходам генератора питающих напряжений, и блок регулирования амплитуды напряжений в фазных обмотках дополнительного статора, вход блока подключен к выходу фазового детектора. 2 з.п. ф-лы, 7 ил.
9 W 4
//
Фиг. 2
Фиг. J
фиг. 4
fst
-90
в,
в-к
ЛА,
Г«Л7
/1
л.
Фиг. 5
Направление вращения
180
/
90
560 ш
s
/
Фиг. 6
Направление вращений /30
Фиг. 7
Ь)
| МАЗЬ ДЛЯ ЛЕЧЕНИЯ ТРОМБОФЛЕБИТА | 1997 |
|
RU2107492C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США №4518907, Н02 К 29/04, 1985 | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
