Изобретение относится к электротехнике, а именно к перевозбуждению гистере- зисных электродвигателей, работающих в прецизионных электроприводах, например з приводах ротора гироскопа.
Целью изобретения является уменьшение потребляемой мощности и повышение стабильности частоты вращения ротора за счет стабилизации магнитного состояния материала ротора и уменьшения его магнитного дебаланса.
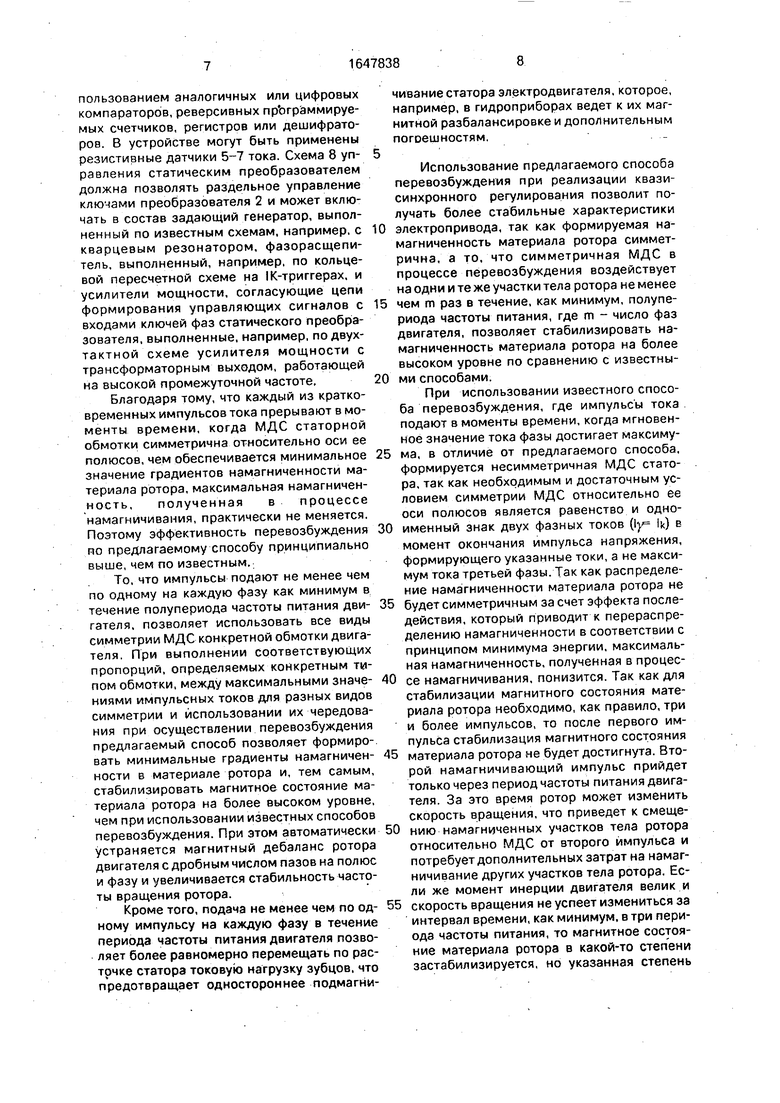
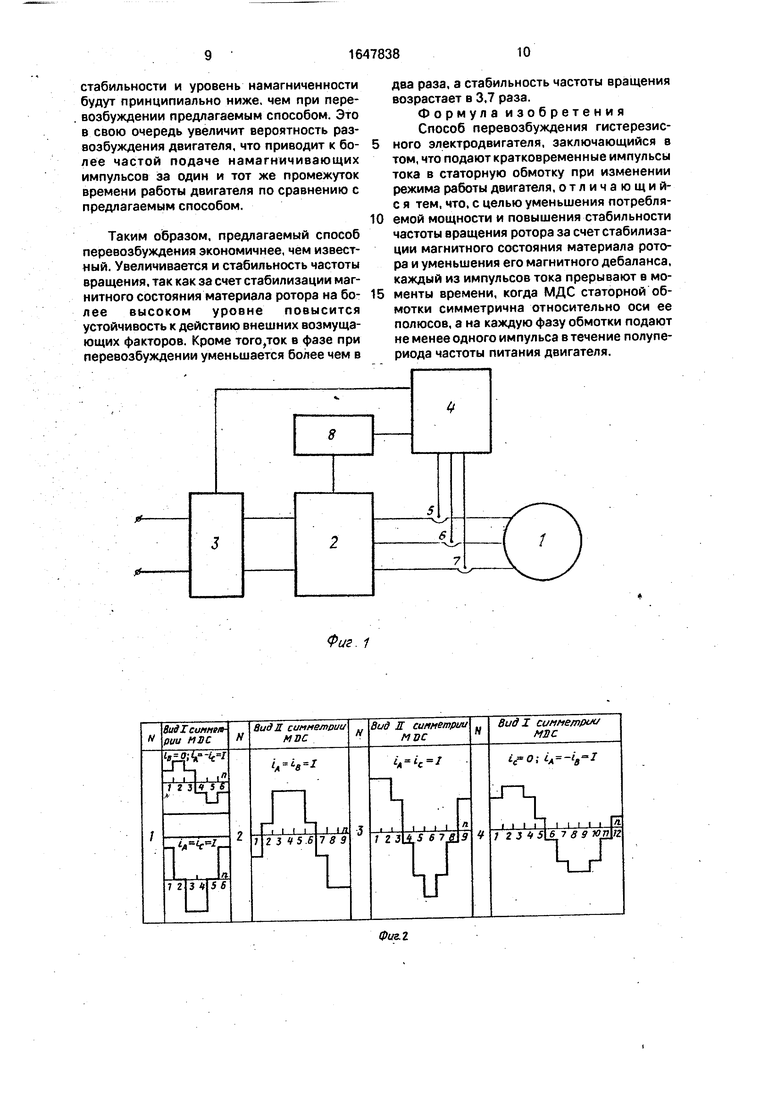
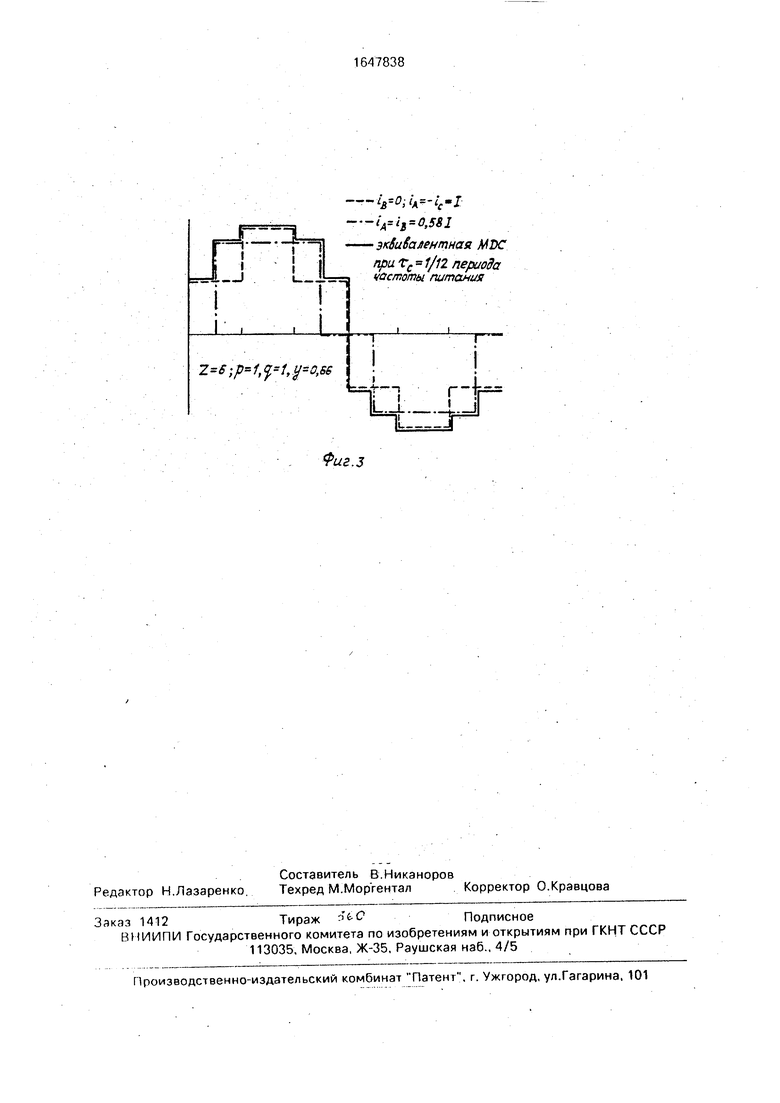
На фиг.1 приведено устройство, реализующее предлагаемый способ (трехфазный гистерезисный двигатель); на фиг.2 - формы МДС статора для рассматриваемых в качестве примера обмоток статора в зависимости от вида симметрии МДС; на фиг.З - формы МДС при чередовании видов симметрии относительно одних и тех же участков тела ротора при соответствующих пропорциях, определяемых конкретным типом обмотки, между максимальными значениями импульсов тока для разных видов симметрии.
Устройство для реализации способа содержит гистерезисный электродвигатель 1, подключенный к статическому преобразователю 2, вход которого соединен с сетью постоянного тока через блок 3 импульсного намагничивания, который соединен с первым выходом формирователя 4 параметров намагничивающих импульсов, вход которого соединен с датчиками 5-7 фазных токов двигателя 1. Второй выход формирователя 4 соединен со схемами 8 управления статического преобразователя 2.
Устройство работает следующим образом.
В схемы формирователя 4 параметров намагничивающих импульсов предварительно вводят условия симметрии МДС, определяемые параметрами распределения статорной обмотки двигателя 1, в соответствии с которыми будут формироваться намагничивающие импульсы тока.
Ё
CN
4 | 00 Сл 00
Так для статора при числе зубцов z б, числе пар полюсов р 1, укорочении двухслойной обмотки у 0,6 и числе пазов на полюс и фазу q 1 максимальное значение зубцовой МДС Fn FI - Fy (где п - номер зубца; I, у , к - МДС соответственно фаз А, В, С), номера зубцов, соответствующих максимуму МДС Fn, n 1,2,3,...г, при виде симметрии I условие симметрии МДС: И 0, ly -Ik, при симметрии If ly I k (условно обозначим обмотку № 1).
Для статора z 9, р 1 ,q 1,5, у 0,6, Fn 2Fi или Fm 2Fi - Fy. При этом номера зубцов, соответствующих Fn для первого случая п 1,4,7, а для второго случая п 2,3,5,6,8,9. Вид симметрии II, условие симметрии МДС iy Ik (обмотка № 2).
Для статора с z 9, р 1, q 1,5, у 0,8 Fn 3F| или Fn 2Fi - Fy. При этом номера зубцов, соответствующих Fn для первого случая п 3,6,9, а для второго п 1,2,4,5,7,8. Вид симметрии II, условие симметрии МДС ly ik (обмотка № 3).
Для статора с z 12, р 1, q 2, у 0,8 Fn 3Fi - Fy. При этом номера зубцов, соответствующих Fn, n 1,2.., условие симметрии li 0, iy -Ik , iy Ik (обмотка № 4).
Положение переднего фронта импульсов напряжения, формирующих намагничивающие импульсы тока, определяются схемой формирователя 4 намагничивающих импульсов, например, из условия tk 1/2 тс, где tk - момент подачи импульса напряжения; тс- интервал времени между двумя со- редними моментами времени, при которых выполняются условия симметрии МДС. Он задается заранее либо формируется на основе текущей информации с датчиков 5-7 фазных токов и введенных условий симметрии МДС. Сформированные интервалы подачи импульсов напряжения запоминаются схемой формирователя 4 параметров намагничивающих импульсов и могут обновляться перед новым циклом намагничивания.
Так как существует конкретный набор возможных видов симметрии МДС, причем их положение в пространстве определено однозначно - максимум симметричной МДС определяется формой записи Fn МДС зубцов для конкретных зубцов п, и для других зубцов условие симметрии МДС не выполняется, то при работе двигателя с синхронной скоростью вращения ротора со значительным моментом инерции одни и те же участки тела ротора находятся под зубцами с максимальной симметричной МДС через промежутки времени, определяемые скоростью вращения ротора и пространственным положением зубцов с максимальной симметричной МДС.
Так, для двигателя с обмоткой № 1 минимальное время Тс. между возможными
положениями симметричной МДС с видом симметрии I, так же как и с видом симметрии II (фиг.2), равно времени перемещения точки тела ротора между соседними зубцами или временем поворота ротора на угол
0 у 2я/г , где г - число зубцов, т.е. тс p/(z f). Для двигателя с числом пар полюсов р 2 частотой питающего напряжения f 1000 Гц и z 12 гс 167 с или 1 /6 периода питающего напряжения. При этом указанное ми5 нимальное время при чередовании видов симметрии равно тс 1/(12f).
Ясно, что возможность использования всех видов симметрии или одного выбранного вида с последовательным перемеще0 нием максимальной симметричной МДС по всем зубцам статора ограничивается с одной стороны возможностью формирования требуемой величины импульса тока за указанный промежуток времени, а с другой сто5
роны - условием постоянства скорости
ротора за цикл перевозбуждения.
Поэтому вопрос о количестве импульсов тока и длительности цикла перевозбуждения может быть решен экспериментальным
0 путем, либо этот процесс выбора может быть автоматизирован и реализован в рассматриваемом устройстве, для чего формирователь 4 параметров намагничивающих импульсов первоначально формирует пара5 метры импульсов из условия использования всех видов симметрии при минимальной длительности цикла перевозбуждения, например, за полупериод частоты питающего напряжения. Если импульсы тока не дости0 гают требуемой величины, то формирователь 4 параметров намагничивающих импульсов симметрично уменьшает количество используемых интервалов симметрии, т.е. увеличивает интервал гс, тем самым
5 увеличивая длительность импульсов напряжения до тех пор, пока импульс тока не достигнет требуемой величины к моменту окончания импульса напряжения. Ясно, что при этом будет подано максимальное коли0 чество импульсов, обеспечивающих симметричное намагничивание материала ротора до требуемого уровня при минимальной длительности цикла перевозбуждения. О том, что требуемый уровень намагничен5 ности достигнут, судят по идентичности реакции двигателя после прерывания каждого поданного импульса тока, например, по равенству интегральных значений тока за интервал времени между намагничивающими
импульсами тока или по равенству абсолютных значений тока, измеренных через один и тот же интервал времени после прерывания каждого импульса тока, после чего по- дачу импульсов прекращают.
При несоответствии параметров фазных токов наперед заданным значениям, которые могут так же формироваться в процессе работы двигателя 1 формирователем 4, например, при превышении величины фазных токов над заданным значением, схемой формирователя 4 параметров намагничивающих импульсов, формируется сигнал, на разрешение подачи управляющих сигна- лов, сформированных схемой формирователя 4, на блок 3 импульсов намагничивания и на схему 8 управления статического преобразователя 2.
При формировании импульсов тока в со- ответствии с условием симметрии МДС вида I ii 0, у -Ik на блок 3 импульсного намагничивания выдается разрешение на подключение источника повышенного напряжения к входу статического преобразо- вателя 2 и сигнал на отключение i-й фазы статического преобразователя 2 через его схему 8 управления. При этом импульсные токи двух оставшихся фаз равны и противоположны по знаку в любой момент времени действия импульса напряжения. Требуемую величину импульсов тока устанавливают, регулируя амплитуду импульсов напряжения. Задний фронт импульсов напряжения и соответствующий этому моменту времени максимум импульсного тока фаз совпадают во времени. Ясно, что сдвигая во времени в ту или иную сторону сформированную в формирователе 4 последовательность интервала подачи импульсов, можно формиро- вать симметрично намагниченность материала ротора при разных углах между вектором поля статора и вектором намагниченности ротора, осуществляя тем самым режим квазисинхронного регулирования, который отличается от известных способов реализации такого режима повышенной однозначностью характеристик за счет формирования симметричной намагниченности материала ротора и ее повышенной ста- бильности.
Значительный момент инерции гироскопического гистерезисного двигателя и малый интервал времени цикла перевозбуждения позволяет при реализации пере- возбуждения намагничивать материал ротора симметричной МДС практически без пространственного сдвига. При малых моментах инерции двигателя необходимо вводить коррекцию временного положения
намагничивающих импульсов для устранения пространственного сдвига между наведенной намагниченностью от первого импульса и последующими, что может быть осуществлено путем контроля положения ротора.
При формировании импульсов в соответствии с условием симметрии вида II ly ik управляющий сигнал с выхода формирователя 4 подается на блок 3 импульсного намагничивания, разрешая подключение источника повышенного напряжения к входу статического преобразователя 2, и на схему 8 управления статического преобразователя 2, при этом токи двух фаз двигателя 1 имеют одинаковый знак, что реализуется подключением фаз J и k к одному полюсу питающего напряжения. Токи фаз у и k в этот момент не равны, хотя и имеют одинаковый знак. Для достижения равенства указанных токов сравнивают текущие значения и отключают, воздействуя на схему 8, фазу, в которой ток больше, до момента их равенства. Далее процесс повторяют, поддерживая равенство токов фаз у и k. Требуемую величину импульсов тока устанавливают, регулируя амплитуду импульсов напряжения. При этом с целью повышения надежности устройства ограничивают амплитуду импульсов напряжения при превышении током третьей фазы, равного сумме токов фаз у и k, установленного допустимого значения.
При реализации перевозбуждения с использованием всех видов симметрии МДС в формирователь 4 параметров намагничивающих импульсов вводят соответствующие условия симметрии и устройство работает аналогично рассмотренным вариантам.
Формы МДС при чередовании видов симметрии МДС относительно одних и тех же участков тела ротора при соответствующей пропорциональности амплитуд намагничивающих импульсов тока приведены на фиг.З для обмотки Kb 1.
Устройство, реализующее предлагаемый способ, может быть выполнено на основе статического преобразователя 2 как с синусоидальной формой выходного напряжения, так и на основе трехфазного мостового инвертора, что зависит от конкретных задач, решаемых электроприводом. Блок 3 импульсного намагничивания может быть выполнен по известным схемам стабилизатора тока с управляемой установкой тока. Схема формирователя 4 параметров намагничивающих импульсов может быть выполнена по известным схемам, реализующим заложенные в ее работу алгоритмы, с использованием аналогичных или цифровых компараторов, реверсивных пр ограммируе- мых счетчиков, регистров или дешифраторов. В устройстве могут быть применены резистивные датчики 5-7 тока. Схема 8 управления статическим преобразователем должна позволять раздельное управление ключами преобразователя 2 и может включать в состав задающий генератор, выполненный по известным схемам, например, с кварцевым резонатором, фазорасщепи- тель. выполненный, например, по кольцевой пересчетной схеме на IK-триггерах. и усилители мощности, согласующие цепи формирования управляющих сигналов с входами ключей фаз статического преобразователя, выполненные, например, по двухтактной схеме усилителя мощности с трансформаторным выходом, работающей на высокой промежуточной частоте.
Благодаря тому, что каждый из кратковременных импульсов тока прерывают в моменты времени, когда МДС статорной обмотки симметрична относительно оси ее полюсов, чем обеспечивается минимальное значение градиентов намагниченности материала ротора, максимальная намагниченность, полученная в процессе намагничивания, практически не меняется. Поэтому эффективность перевозбуждения по предлагаемому способу принципиально выше, чем по известным.
То, что импульсы подают не менее чем по одному на каждую фазу как минимум в течение полупериода частоты питания двигателя, позволяет использовать все виды симметрии МДС конкретной обмотки двигателя, При выполнении соответствующих пропорций, определяемых конкретным типом обмотки, между максимальными значениями импульсных токов для разных видов симметрии и использовании их чередования при осуществлении перевозбуждения предлагаемый способ позволяет формировать минимальные градиенты намагниченности в материале ротора и, тем самым, стабилизировать магнитное состояние материала ротора на более высоком уровне, чем при использовании известных способов перевозбуждения. При этом автоматически устраняется магнитный дебаланс ротора двигателя с дробным числом пазов на полюс и фазу и увеличивается стабильность частоты вращения ротора.
Кроме того, подача не менее чем по одному импульсу на каждую фазу в течение периода частоты питания двигателя позволяет более равномерно перемещать по расточке статора токовую нагрузку зубцов, что предотвращает одностороннее подмагничивание статора электродвигателя, которое, например, в гидроприборах ведет к их магнитной разбалансировке и дополнительным погрешностям.
Использование предлагаемого способа перевозбуждения при реализации квазисинхронного регулирования позволит получать более стабильные характеристики
электропривода, так как формируемая намагниченность материала ротора симметрична, а то, что симметричная МДС в процессе перевозбуждения воздействует на одни и те же участки тела ротора не менее
чем m раз в течение, как минимум, полупериода частоты питания, где m - число фаз двигателя, позволяет стабилизировать намагниченность материала ротора на более высоком уровне по сравнению с известными способами.
При использовании известного способа перевозбуждения, где импульсы тока подают в моменты времени, когда мгновенное значение тока фазы достигает максимума, в отличие от предлагаемого способа, формируется несимметричная МДС статора, так как необходимым и достаточным условием симметрии МДС относительно ее оси полюсов является равенство и одноименный знак двух фазных токов (ly Ik) в момент окончания импульса напряжения, формирующего указанные токи, а не максимум тока третьей фазы. Так как распределение намагниченности материала ротора не
будет симметричным за счет эффекта последействия, который приводит к перераспределению намагниченности в соответствии с принципом минимума энергии, максимальная намагниченность, полученная в процессе намагничивания, понизится. Так как для стабилизации магнитного состояния материала ротора необходимо, как правило, три и более импульсов, то после первого импульса стабилизация магнитного состояния
материала ротора не будет достигнута. Второй намагничивающий импульс прийдет только через период частоты питания двигателя. За это время ротор может изменить скорость вращения, что приведет к смещению намагниченных участков тела ротора относительно МДС от второго импульса и потребует дополнительных затрат на намагничивание других участков тела ротора. Если же момент инерции двигателя велик и
скорость вращения не успеет измениться за интервал времени, как минимум, в три периода частоты питания, то магнитное состояние материала ротора в какой-то степени застабилизируется, но указанная степень
стабильности и уровень намагниченности будут принципиально ниже, чем при пере- . возбуждении предлагаемым способом. Это в свою очередь увеличит вероятность раз- возбуждения двигателя, что приводит к более частой подаче намагничивающих импульсов за один и тот же промежуток времени работы двигателя по сравнению с предлагаемым способом.
Таким образом, предлагаемый способ перевозбуждения экономичнее, чем известный. Увеличивается и стабильность частоты вращения, так как за счет стабилизации магнитного состояния материала ротора на более высоком уровне повысится устойчивость к действию внешних возмущающих факторов. Кроме того,ток в фазе при перевозбуждении уменьшается более чем в
два раза, а стабильность частоты вращения возрастает в 3,7 раза.
Формула изобретения Способ перевозбуждения гистерезисного электродвигателя, заключающийся в том, что подают кратковременные импульсы тока в статорную обмотку при изменении режима работы двигателя, отличающий- с я тем, что, с целью уменьшения потребляемой мощности и повышения стабильности частоты вращения ротора за счет стабилизации магнитного состояния материала ротора и уменьшения его магнитного дебаланса, каждый из импульсов тока прерывают в моменты времени, когда МДС статорной обмотки симметрична относительно оси ее полюсов, а на каждую фазу обмотки подают не менее одного импульса в течение полупериода частоты питания двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| СПОСОБ ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ РЕАКЦИЕЙ ЯКОРЯ | 2011 |
|
RU2465713C2 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| Гистерезисный электродвигатель | 1977 |
|
SU748695A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Многофазный мотор-генератор с магнитным ротором | 2015 |
|
RU2609524C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
Изобретение относится к электротехнике. Цель изобретения - уменьшение потребляемой мощности и повышение стабильности частоты вращения. Способ перевозбуждения гистерезисного электродвигателя заключается в том, что в статорную обмотку подают кратковременные импульсы тока, прерывают эти импульсы в моменты времени, когда МДС статорной обмотки симметрична относительно оси ее полюсов, а на каждую фазу обмотки подают не менее одного импульса в течение полупериода частоты питания двигателя. 3 ил.
Фиг 1
ВидТсинне - рии МНС
N
BudS симметоии
мое
/, « /
1
fd-V r
|i i i iI I in 3 «5 8 9
72 3 Ч 5 6
Вид I симметрии МВС
л -15
Фиг.з
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ перевозбуждения гистерезисного электродвигателя | 1977 |
|
SU748694A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
