ел
о
00 00
3150
Изобретение относится к ультразвуковой измерительной медицинской aima ратуре для медико-биологических исследований головного мозга.
Цель изобретения - повышение точности измерения при длительных динамических исследованиях.
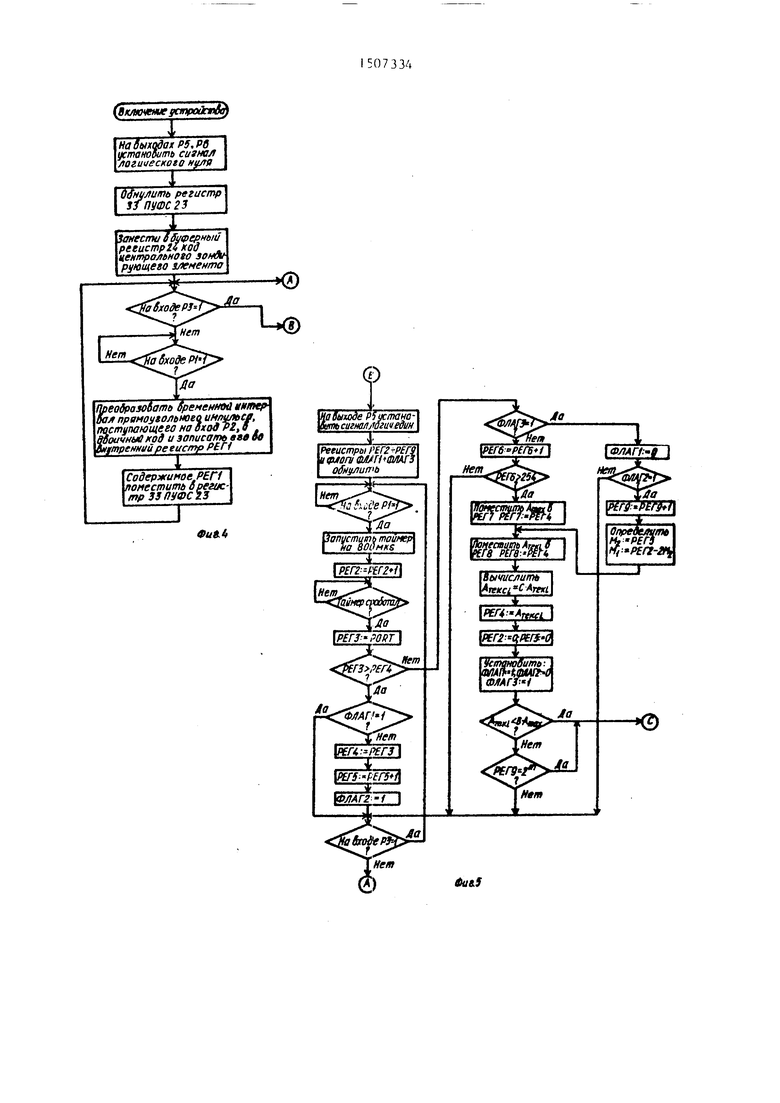
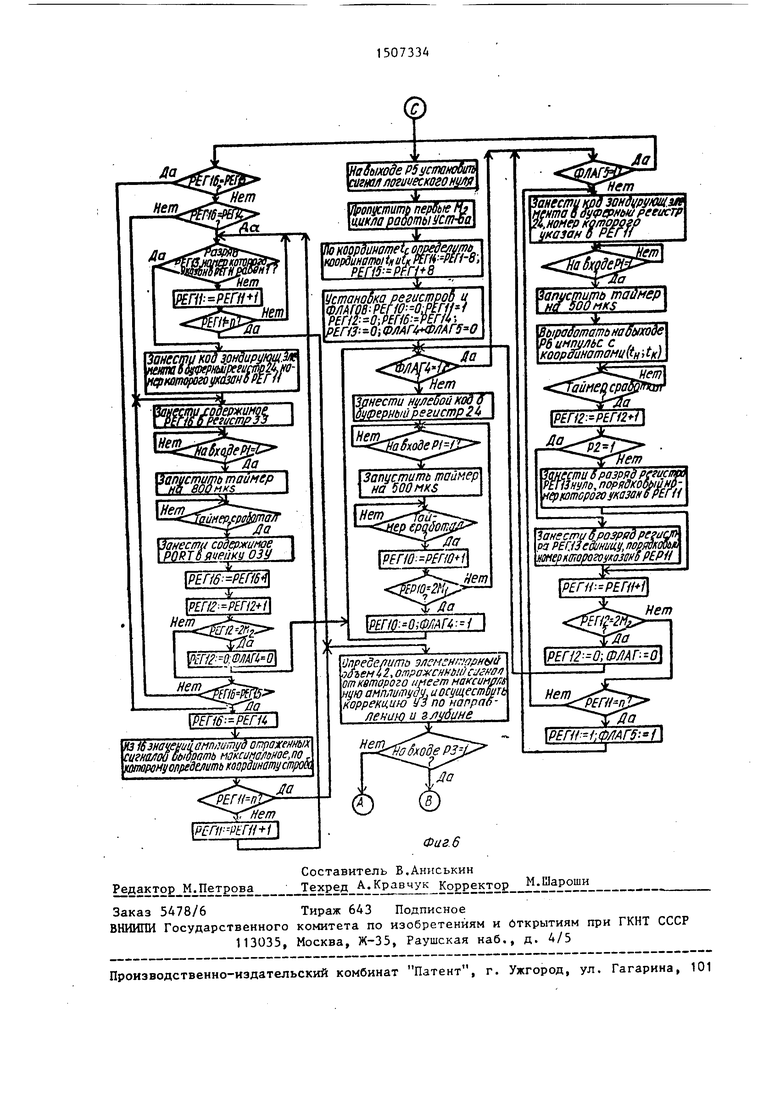
На фиг.1 представлена структурная схема устройства; на фиг.2 и 3 - вре менные диаграммы работы блоков устройства; на фиг.4, 5 и 6гблок-схема алгоритма работы цифрового автомата.
Устройство содержит синхронизатор 1, соединенный с генератором 2 строба с задатчиком 3, с индикатором 4 и генератором 5 возбуясдения, приемник 6, первый блок 7 выборки и хранения, интегратор 8, регистратор 9, ультра- |звуковой датчик 10, сумматор 11, последовательно соединенные второй блок 12 выборки и хранения, ограничитель-формирователь 13, первый триггер 14, цифровой автомат 15, регистр 16, многоканальный ключ 17, мультиплексор 18, второй триггер 19, переключатель 20 режима, аналого-цифрово преобразователь 21 и блок 22 строби- рования.
Устройство работает следующим образом.
Цикл работы устройства начинается с импульса запуска, вьфабатываемого синхронизатором 1 с частотой 250 Гц. В каждом цикле устройство излучает ультразвуковые колебания, принимает эхосигнал, обрабатывает его и подготавливает блоки устройства к следующему циклу.
В ультразвуковом поле излучающего элемента ультразвуковой луч распространяется параллельным пучком в ближней зоне (зона дифракции Френеля) . Протяженность ближней зоны связана с размерами излучающего элемента известными соотношениями: для излучающего элемента квадратной формы
0 элемента круглой
(2)
где Ij - протяженность ближней зоны; 55
А - длина упругой волны;
а - сторона квадратного излучающего элемента;
0
Q
5
5
0
5
0
5
0
5
b - радиус излучающего элемента круглой формы.
При проведении биологических исследований геометрические размеры излучающего эпемента или группы их составных элементов выбирают такими, чтобы исследуемые структуры располагались в ближней зоне.
Устройство имеет три режима работы: Поиск, Регистрация и Коррекция.
В режиме Поиск на выходе переключателя 20 режима вырабатывается сигнал лог. О (фиг.2ж), который поступает на третий вход цифрового автомата 15 и на второй управляющий вход мультиплексора 18, коммутирующий выход генератора 2 строба - на выход мультиплексора 18, а в буферный регистр 16 записывается двоичный код центрального зондирующего элемента. В каждом-цикле работы устройства длительность прямоугольного импульса триггера 19, поступающего на второй вход цифрового автомата 15-,
преобразуется им в двоичный код координаты импульса строба, который фиксируется во внутреннем регистре и одновременно выводится в регистр блока 22 стробирования.
В режиме Поиск датчик 10 устанавливают на поверхности гоЛовы в требуемом направлении ультразвукового зондирования и путем визуального анализа амплитуды отраженного сигнала на экране индикатора 4, путем юстировки относительно поверхности головы осуществляют поиск необходимой пульсирующей внутричерепной структуры головного мозга, наведение ультразвукового луча на нее по максимальной амплитуде отраженного от нее сигнала и фиксацию датчика 10.
Затем производится захват объекта локаций (участка внутричерепной структуры) путем определения глубины его залегания относительно датчика 10. Это осуществляется задатчиком 3 так, чтобы метка строба на индикаторе 4, вырабатьгеаемая под управлением импульса строба, совмещалась с участком отраженного от исследуемой структуры сигнала. Тогда длительность прямоугольного импульса, сформированного на выходе триггера 19 и поступающего на второй вход Р2 цифрового автомата 15, несет информацию о глубине залегания исследуемой внутриче
515
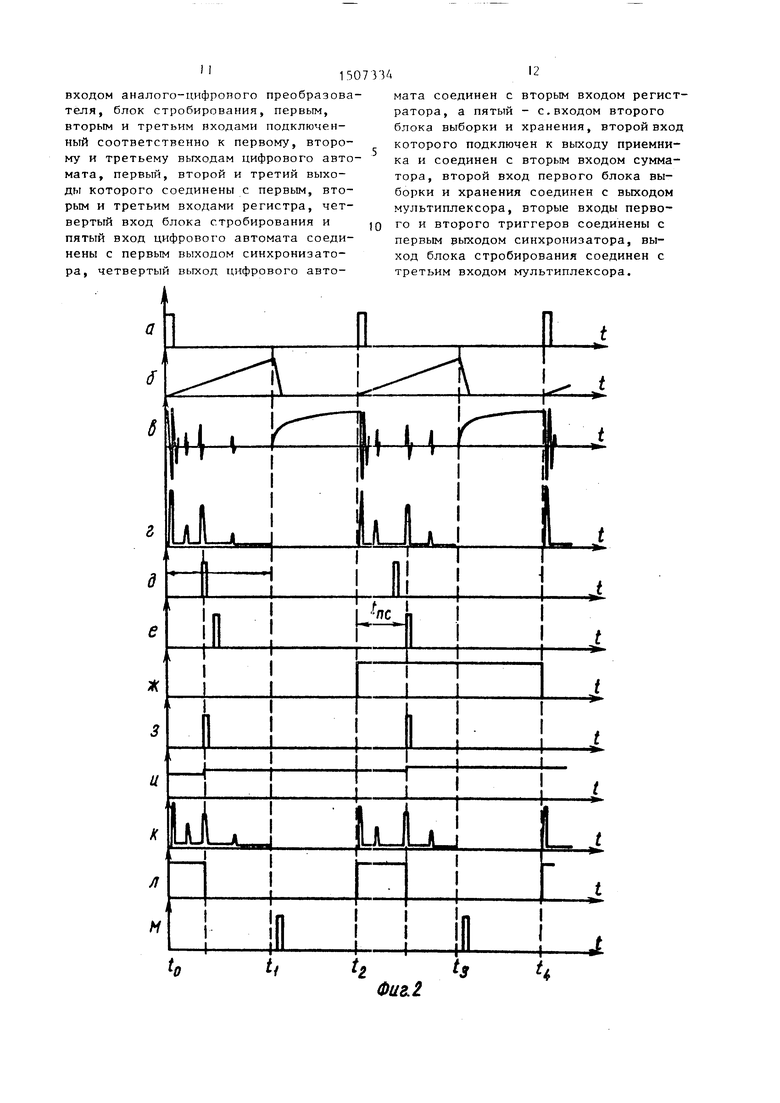
репной структуры. Режим Поиск поясняется временными диаграммами (интервал времени ), представленными на фиг.2, где обозначено: а - сигнал на первом входе синхронизатора 1; б - сигнал развертки индикатора 4; в - сигнал на выходе генератора 5 возбуждения, соединенного с входом ограничителя-формирователя 13 и с вторым аналоговым входом - выходом многоканального ключа 17; г - сигнал на выходе приемника 6; д - сигнал на выходе генератора 2 строба; е - сигнал на выходе блока 22 стробиро- вания; ж - сигнал на выходе переключателя 20 режима; з - сигнал на выходе мультиплексора 18; и - сигнал на выходе блока 7 выборки и хранения; к - сигнал на выходе сумматора 11; л - сигнал на выходе триггера 19 ; м - сигнал i на втором выходе слнхро
низатора 1; t,, t, - ни, соответствуюпше
моменты време- окончанию приема отраженных сигналов.
После осуществлет{я поиска и-за- хвата объекта локации устройство переключателем 20 режима переводят в режим Регистрация. На выходе переключателя 20 режима вьфабатывает- ся сигнал лог. 1, поступающий на второй вход мультиплексора 18 и на третий вход РЗ цифрового автомата ,15, под управлением которого выход блока 22 стробирования коммутируется на выход мультиплексора 18, а его внутренний таймер устанавливается на Т мин и на пятом выходе Р5 вьфабаты- вается сигнал лог. 1, разрешающей регистратору 9 производить регистрацию сигнала, поступающего на первый его вход. Импульс строба, вырабаты- ваемый на выходе мультиплексора 18, поступает на второй управляющий вход блока 7 выборки и хранения и осуществляет вьщеление из эхосигнала, отраженного от исследуемой структуры, ко- торьй запоминается блоком 7 выборки и хранения до момента выборки в следующем цикле (фиг.2и). Просуммированный во времени сигнал с выхода блока 7 выборки и хранения поступает на интегратор 8, осуществляющий сглаживание высокочастотных составляющих в спектре сигнала, с выхода которого он поступает на первый вход регистратора 9 для регистрации в виде развер- нутой во времени пульсовой кривой.
0
334
5
0
5
0
5
0
5
0
5
Переход устройства из реж1тма Регистрация в режим Коррекция и об- - ратно осуществляется под управлением цифрового автомата 15 по истечении временного интервала в Т мин или если максимальная амплитуда отраженного сигнала в текущем пульсовом цикле стала менее В А,,, где В - коэ1})фициент установки, (,6-0,8) , а - максимальная амплитуда отраженного сигнала в первом пульсовом пикле с момента перевода устройства в режим Регистрация.
Цри выполнении одного из двух условий устройство переходит в режим Коррекция, при котором амплитуду отраженного эхосигнала тз каждом цикле с помощью аналого-цифрового преобразователя 21 вводят на четвертый вход ЦИФРОВ1ЭГО автомата 15, где вычисляется выполнение условия перевода. Режим Регистрация поясняется на фиг. 2 в интервале tf-t-i.
Режим Коррекция введен для удержания выбранного направления ультразвукового зондирования от механических смещений датчика 10 относительно объекта локации, возникающих в процессе проведения исследований.
Режим Коррекция обеспе -;ивается путем:
электронного сканирования ультразвуковым лучом- прилегающего к обт.ек- ту локации объема мозговой ткани;
запоминания сигналов, отраженных от элементарных объемов сканируемой мозговой ткани (под элементарным объемом мозговой ткани понимается объем, ограниченный геометрическими размерами ультразвукового луча зон- . дирующего элемента и временным интервалом импульса строб ;
анализа амплитудных значений сигналов, отраженных от элементарных объемов мозговой ткани, с целью определения пространственной ориентации исследуемой структуры по отнощению к рабочей поверхности двумерной пье- зоматрицы датчика 10;
коррекции направления ультразвукового зондирования и временного положения импульса строба.
При этом электронное сканирование объема мозговой ткани, содержащего пульсирующую внутричерепную структуру, с целью наведения ультразвукового луча на нее по максимальной ампли- туда отраженного от ее стенки сигна7150
ла ввиду того, что амплитуда отраженного сигнала от одного и того же участка гтульсирующей структуры изменяется в такт с сердечной деятельностью, производят последовательно во времени в окрестностях характерной точки на пульсовой кривой. Та- кой характерной точкой может быть максимальная амплитуда отраженного сигнала.
Для этого в режиме Регистрация после того, как в i-м пульсовом цикле в момент времени t,. будет определена точка максимальной амплитуды Ь; со значением в ней, равным проверяются два условия перехода устройства в режим Коррекция и, если будет принято решение о продолжении работы устройства в исходном ре- жиме,то цифровой автомат вычисляет зна чение С-А -ещСгде ,8-0,95) и подсчитывает количество циклов М и М работы устройства с помощью двух внутренних программно-организаванньгх счетчиков.
В режиме Коррекция устройство под управлением цифрового автомата 15 в первые М цикла работы продолжает излучать и принимать отраженные сигналы,, а затем с первого, второго и третьего выходов его в буферный регистр 16 записывается нулевой двоичный код, закрывающий все ключи многозлементного ключа 17, и запускаются внутренние счетчики Сч1 на М пассивных цикла работы устройства, во время которых датчик 10 ультразву ковые колебания в полость черепа не излучает, и счетчик Сч2 - на 2М активных цикла работы устройства, в течение которых осуществляется электронное сканирование. Далее следуют вновь М пассивных цикла, а затем вновь 2М активных цикла работы устройства и т.д., пока оно не завер шит коррекцию направления ультразву- ,кового зондирования и временного по- «ложения импульса строба.
Объем мозговой ткани, прилегающий к исследуемому участку структуры (участок артериального сосуда) и подвергающийся электронному сканированию, ограничен геометрическими размерами рабочей поверхности датчика 10 и глубиной, определяемой времен- ным интервалом , где t временное положение импульса строба, смещенного на восемь дискретов левее
,-
,«
.г jn- , 25
о-
50 ,
35
40
45
8
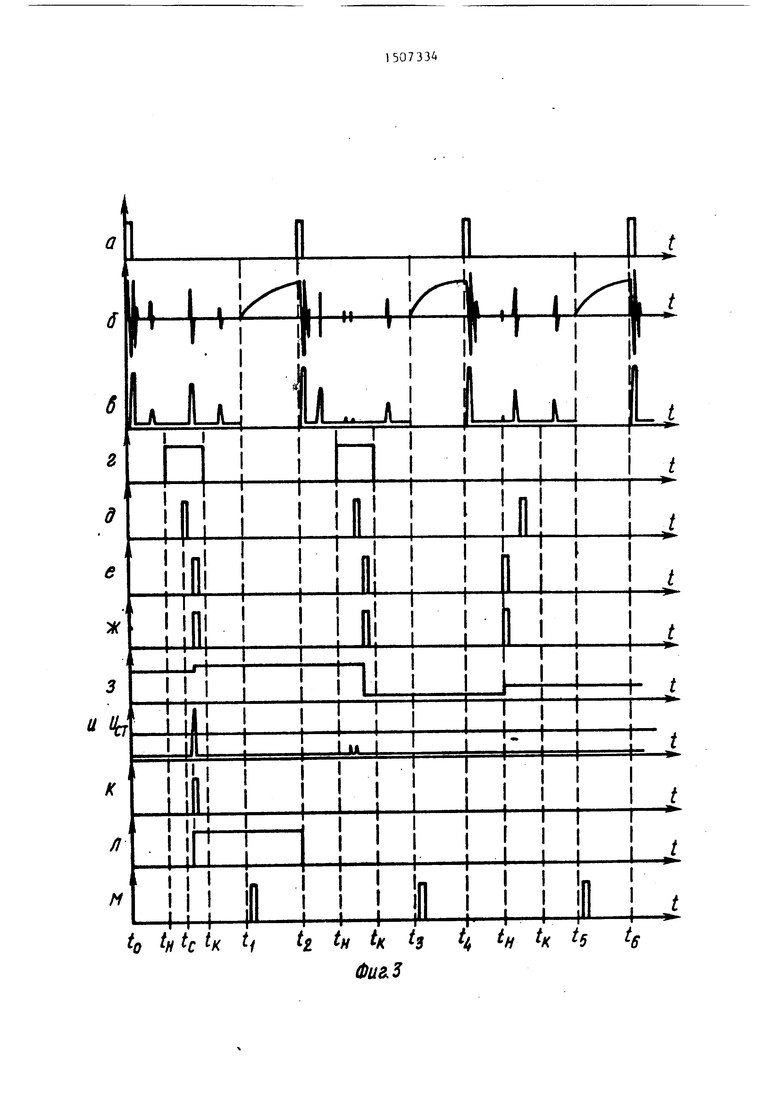
а t к - временное положение импульса строба, смещенного на восемь дискретов правее относительно момента времени tf (фиг.З). Электронное сканирование ультр&звуковым лучом объема мозговой ткай производится путем программно-управляемого стробирова- ния эхосигнала и перемещения зондирующего элемента по рабочей .поверхности пьезоматрицы датчика 10.
На фиг.З представлены временные диаграммы работы устройства в режиме Коррекция, где обозначено: а - сигнал на первом выходе синхронизатора 1; б - сигнал на выходе генератора 5 возбуждения; в - сигнал на выходе приемника 6; г - сигнал на тестом выходе Р6 цифрового автомата 15; д - сигнал на выходе генератора 2 строба; е - сигнал на выходе блока 22 стробирования; ж - сигнал на выходе мультиплексора 18;- з - сигнал на выходе блока 7 выборки и хранения; И - сигнал на выходе блока 12 выборки и хранения; к - сигнал на выходе ограничителя-формирователя 13; л - сигнал на выходе триггера 14; м - сигнал на втором,,выходе синхронизатора 1; 1ц соответствует переднему, а t - заднему фронту импульса на шестом выходе Р6 цифрового автомата 15; а t (. соответствует переднему фронту импульса на выходе генератора 2 строба.
Коррекция временного положения импульса строба и направления ультразвукового зондирования осуществляется в два этапа.
На первом этапе производится электронное сканирование объема мозговой ткани с грубым быстрым анализом отраженных сигналов. Для этого активным сначала становится первый зондирующий элемент, который в начале сле- лующего цикла излучит ультразвуковые колебания, примет отраженные сигналы, а устройство проанализирует временной интервал на наличие в нем хотя бы одного отраженного сигнала от внутричерепных структур. Если отраженные сигналы от внутричерепных структур в выделенном интервале присутствуют, то триггер 14 вырабатывает на своем выходе сигнал лог, 1 (интервал на фиг.З), в противном случае на выходе триггера 14 будет выработан сигнал лог. О (интервал t4-t на фиг.З). Цифровой
915
автомат 15 произведет анализ сигнала на первом входе РД и при наличии лог. Ч осуществит запоминание номера текущего активного зондирующего элемента. В следующем цикле активным становится второй зондирующий элемент, образованный из первого путем его перемещения на один шаг, равный ширине пьезоэлемента матричного датчика 10 и т.д., пока не будут опрошены все его зондирующие Элементы. В результате первого этапа во внутренней памяти цифрового автомата 15 будут запомнены номера тех зондирующих элементов, которые при приеме отраженных сигналов во
временном интервале содержат хотя бы один сигнал, отраженный от внутричерепных структур.
На втором этапе производится более тщательный анализ отраженных сигналов во временном интервале ,, при включении каждого, например, из
Устройство для ультразвукового из мерения характеристик внутричерепной гемоликвородинамики, содержащее синтрех зондирующих элементов. В резуль-35 хронизатор, подключенный к генератотате во внутренней памяти -цифрового автомата 15 будут записаны три двоичных кода амплитудных значений сигналов, отраженных от трех элементарных объемов мозговой ткани, а также коор- Q динаты импульсов стробов и порядковых номеров зондирующих элементов, определяющие эти три элементарных объема. Далее производится анализ значений трех амплитуд отраженных сигналов и выбирается из них макси- мальное, по которому определяется координата импульса строба и порядковый номер зондирующего элемента. В 1 езультате цифровой автомат 15 проводит запись кода в регистр 16, под управлением которого включается необходимый зондирующий элемент и запись кода в блок 22 стробирования для выработки коврдинаты строба и тем самым осуществляется коррекция направления зондирования. Сигналом с пятого выхода цифрового автомата разрешается запись в регистраторе 9. На фиг.4 представлен алгоритм работы цифрового автомата 15 в режиме Поиск.
ру строб-импульса, вторым входом соединенному с задатчиком, к первому входу индикатора и к генератору возбуждения, выходом соединенному с вхо дом приемника, выход которого подключен через блок выборки и хранения и интегратор к.входу регистратора, ультразвуковой датчик и сумматор, выходом подключенный к второму входу индикатора, отличающееся тем, что, с целью повьш1ения точности измерения при длительных динамических исследованиях, в него дополнительно введены последовательно соеди- 4Q диненные дополнительный блок выборки k хранения, ограничитель-формирователь, триггер, цифровой автомат, регистр и многоканальный ключ, подключенный к ультразвуковому датчику, а вторым входом соединенный с генератором возбуждения, мультиплексор, соединенный через второй триггер с вторым входом цифрового автомата, а входом - в выходом генератора строб- импульса, переключатель режима, соединенный с вторым входом мультиплексора и третьим входом цифрового автомата, аналого-цифровой преобразователь, входом подключенный к выходу первого блока выборки и хранения, а выходом - к четвертому входу цифрового автомата, пятый вход которого подключен к выходу синхронизатора, второй вход которого соединен с вторым
45
50
При появлении на третьем входе цифрового автомата 15 сигнала лог. 1 осуществляется режим регистрации по алгоритму на фиг.5.
При выполнении необходимых одного из двух условий цифровой автомат 15
0
10
переходит в алгоритм режима коррекции на фиг. 6.
Цифровой автомат 15 может быть реализован на микросхеме однокрис- тальной микроэвм.
Блок 22 стробирования выполняется программно-управляемым формирователем и может включать генератор им - пульсов, счетчик, дешифратор адреса, деишфратор срарнения кодов и регистр памяти двоичного кода.
Ультразвуковой датчик 10 выполняется в виде многоэлементной двухмерной йьезоматрицы. Для уменьшения количества проводов буферный регистр 16 и ключ 17 необходимо размещать в едином корпусе с датчиком.
Формула изобретения
Устройство для ультразвукового измерения характеристик внутричерепной гемоликвородинамики, содержащее синхронизатор, подключенный к генератоQ
5
ру строб-импульса, вторым входом соединенному с задатчиком, к первому входу индикатора и к генератору возбуждения, выходом соединенному с входом приемника, выход которого подключен через блок выборки и хранения и интегратор к.входу регистратора, ультразвуковой датчик и сумматор, выходом подключенный к второму входу индикатора, отличающееся тем, что, с целью повьш1ения точности измерения при длительных динамических исследованиях, в него дополнительно введены последовательно соеди- Q диненные дополнительный блок выборки k хранения, ограничитель-формирователь, триггер, цифровой автомат, регистр и многоканальный ключ, подключенный к ультразвуковому датчику, а вторым входом соединенный с генератором возбуждения, мультиплексор, соединенный через второй триггер с вторым входом цифрового автомата, а входом - в выходом генератора строб- импульса, переключатель режима, соединенный с вторым входом мультиплексора и третьим входом цифрового автомата, аналого-цифровой преобразователь, входом подключенный к выходу первого блока выборки и хранения, а выходом - к четвертому входу цифрового автомата, пятый вход которого подключен к выходу синхронизатора, второй вход которого соединен с вторым
5
0
150
входом аналого-цнфроного преобразователя, блок стробирования, первым, вторым и третьим входами подключенный соответственно к первому, второму и третьему выходам цифрового автомата, первый, второй и третий выходы которого соединены с первым, вторым и третьим входами регистра, четвертый вход блока стробирования и пятый вход цифрового автомата соединены с первым выходом синхронизатора, четвертый выход цифрового авто12
мата соединен с вторым входом регистратора, а пятый - с.входом второго блока выборки и хранения, второй вход которого подключен к выходу приемника и соединен с вторым входом сумматора, второй вход первого блока выборки и хранения соединен с выходом мультиплексора, вторые входы первого и второго триггеров соединены с первым рьгходом синхронизатора, выход блока стробирования соединен с третьим входом мультиплексора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ внутричерепной диагностики и устройство для его осуществления | 1989 |
|
SU1708307A1 |
| Устройство для ультразвуковой локации головного мозга | 1987 |
|
SU1507333A1 |
| Устройство для оценки функционального состояния головного мозга | 1989 |
|
SU1814871A1 |
| АКУСТИЧЕСКИЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЯ | 2005 |
|
RU2297646C1 |
| Ультразвуковой эхо-импульсный толщиномер | 1988 |
|
SU1566212A1 |
| ЭХОЛОКАТОР | 1990 |
|
RU2020511C1 |
| Устройство для контроля качества материалов | 1988 |
|
SU1631408A1 |
| Анализатор дефектов к ультразвуковому дефектоскопу | 1988 |
|
SU1585751A1 |
| Устройство для ультразвукового контроля | 1982 |
|
SU1071957A1 |
| УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2221494C2 |
Изобретение относится к медико-биологическим исследованиям головного мозга. Цель изобретения - повышение точности измерения при длительных и динамических исследованиях. Устройство содержит синхронизатор 1, соединенный с генератором 2 строба и генератором 5 возбуждения, приемник 6 и индикатор 4, первый 7 и второй 12 блоки выборки и хранения, регистратор 9, ультразвуковой матричный датчик 10, сумматор 11, последовательно соединенные ограничитель - формирователь 13, первый 14 и второй 19 триггеры, цифровой автомат 15, регистр 16, многоканальный ключ 17, мультиплексор 18, переключатель 20 режима, аналого-цифровой преобразователь 21 и блок 22 стробирования. Устройство обеспечивает автоматическую коррекцию направления зондирования и временного интервала стробирования эхосигнала. 6 ил.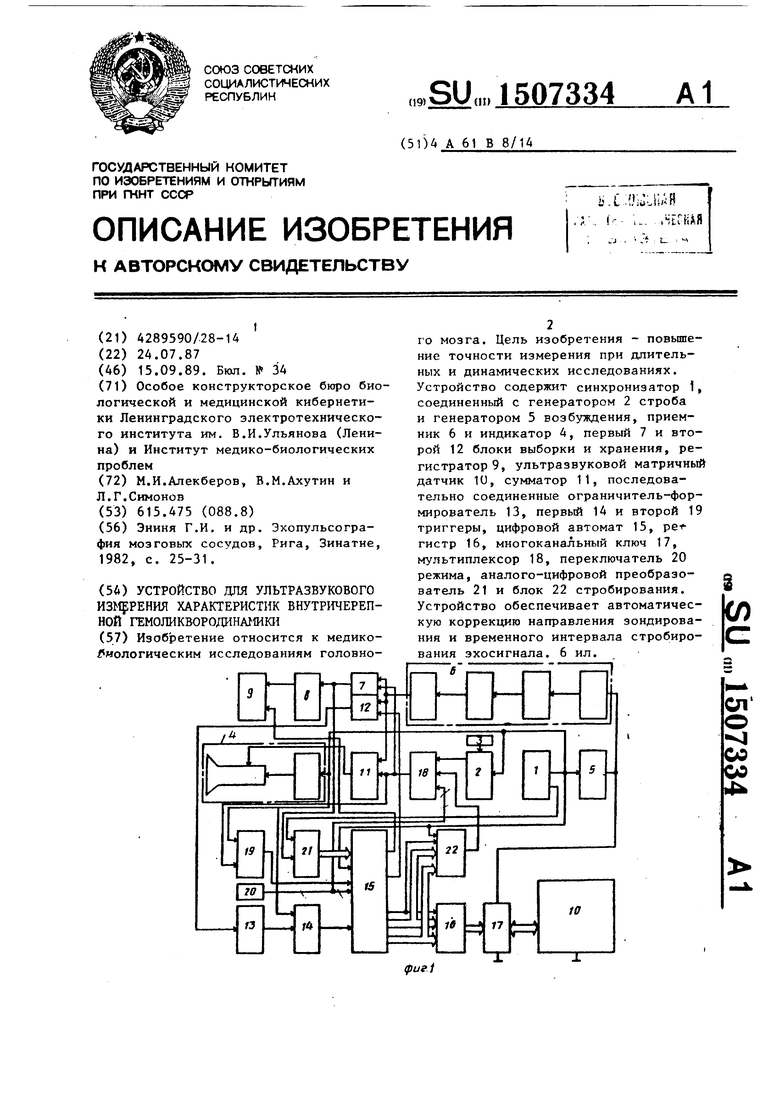
Фиг. 2
м
0 Н С К ff К
ФиаЗ
4 н tK t5 is
кАЮчеме дстоойсяб
Т
навыхаЗахР5,Рв истанобигпь сигнал /югиаескогони/гя
(Цнилить регистр 33 пуфе 2
Занести вНуферныи регистр i( код ,, центрамном рующеео з/ еченто
1
Преобразобатй {репенноа внт Вал npaMoytoflbHOea uHmijitCf, nqcmj/пающееа на Вход , в . оичныО код и записать вав ва igmpeMtfaupeeucmpPfif I
Содержите РЕП
Ф«д4
ptr6 I нет
Да
rff perfff/
преоемт it peri
Mt PEi Iff.:
РЕП-УЛ
Нвт
ФалУ
РЕП5- Рт 8
Установка регис/проо и ФЛАГОВ- /
mii-(3-Mm- Ent,
РЕПЗ- О; ФЛАПг ЛАП О
Да
шпистит таймер j
Занести содержимое PORTSflvei
} ячейку ОЗУ
РЕП6: РЕЩ
.
ilnpedefujmi) элсн нпорнь ооъем « f, ompaxcHt buic eKSi откаторого имеет наксина/а ную амплшщау, иосущестот коррекцию УЗ по напраб- лению и глубине
абшоде Рбустнобал W логического иилц
Занести крд зонд1/рут.з мента овуФерньш рееистр И номер которого указано РЁГ11
Шпустит на 50ОМ
ь тайнер
MKS
Втработатнаоыхоое 1 6инпильсс ,. . координатами (tn w
3анести Н1/ле5ойкод S 5уферныйрегистр 2ff
Ла
ет
нестабразряар( П3ну/ б, порйОкоЬ..,...,, нф которого yKdsaf/о ГН
Да
Нет
Занести орозряЗрет единицу,
он РЕиЗединщу, nopt.
терморогоушано РЕР11
РЕ.
(1: 0;ФМГ4 Т
Нет
РЕП2-- 0;ФМГ.0
Нет
Да
РВП --1;фМГ5- П J
| Эниня Г.И | |||
| и др | |||
| Эхопульсогра- фия мозговьгх сосудов, Рига, Зинатне, 1982, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
