Изобретение относится к акустическим измерителям расстояний в различных средах. Преимущественная область использования - гидроакустика (эхолоты, измеряющие расстояния до дна, гидролокаторы), химическая промышленность (измерения уровней жидких и сыпучих твердых сред), а также другие области техники, в которых необходимо измерять расстояния в жидких, газовых или твердых средах.
Известен ультразвуковой уровнемер (О.И.Бабиков. Контроль уровня с помощью ультразвука, Л.: Энергия, 1971 г., с.62-63), содержащий синхронизатор, соединенный с формирователем строба и генератором зондирующих сигналов, выход которого соединен с акустической системой, находящейся в акустическом контакте со средой лоцирования и с входом приемного тракта, а его выход - со вторым входом формирователя строба, выход которого соединен с входом первого ждущего мультивибратора, а также со схемой "И", второй вход которой соединен с выходом генератора тактовых импульсов. Выход схемы "И" соединен со счетным входом счетчика, выходы которого через регистр соединены с цифровым индикатором. Выход первого ждущего мультивибратора соединен с входом разрешения записи регистра и с входом второго ждущего мультивибратора, выход которого соединен с входом сброса счетчика.
Синхронизатор вырабатывает периодически повторяющиеся синхроимпульсы, запускающие формирователь строба, а также генератор зондирующих сигналов, с выхода которого радиоимпульс поступает на акустическую систему, излучающую в среду лоцирования акустический сигнал, распространяющийся в ней со скоростью с и отражающийся от границы среды лоцирования или объекта, удаленных от акустической системы на расстоянии rх. Эхоимпульс принимается акустической системой и соответствующий ему электрический сигнал поступает на вход приемного тракта, где происходит его обработка по заданному алгоритму (усиление, фильтрация, детектирование и т.д.), после чего он поступает на второй вход формирователя строба и прекращает его работу.
Строб-импульс с выхода формирователя поступает на один из входов схемы "И", на второй вход которой подаются с генератора тактовых импульсов тактовые импульсы, частота которых fT равна с/2, где с - скорость звука в среде лоцирования (см. А.А.Хребтов. Судовые эхолоты, Л.: Судостроение, 1982. с.54). Пачка импульсов с выхода схемы "И" поступает на счетный вход счетчика, с выходов которого цифровой код, соответствующий числу импульсов n в пачке, записывается в регистр и поступает на цифровой индикатор, показывающий число просчитанных импульсов n. Это число численно равно измеряемому расстоянию rх, если выполняется условие fT=с/2.
Для записи цифрового кода в регистр, а также для сброса счетчика перед новым циклом лоцирования вырабатываются два следующих друг за другом видеоимпульса. Для этого задний фронт импульса строба запускает первый ждущий мультивибратор, сигнал с выхода которого поступает на вход разрешения записи регистра, а также запускает второй ждущий мультивибратор, сигнал с выхода которого поступает на вход сброса счетчика.
Причинами, препятствующими достижению технического результата, являются ограниченные эксплуатационные возможности измерителя, обусловленные тем, что скорость звука с в среде лоцирования может меняться от многих факторов - температуры, давления, концентрации различных примесей. Измерения могут проводиться также в средах с различными значениями скорости с. Поэтому перед каждым измерением необходимо определять скорость с и устанавливать частоту тактовых импульсов fT равной с/2. Это значительно усложняет процесс измерения rx и снижает их точность. Данный измеритель не может работать в автоматическом режиме.
Все блоки данного устройства имеются в заявленном объекте.
Известен также измеритель расстояний (см. Горбатов А.А., Рудашевский Г.Е. Акустические методы и средства измерения расстояний в воздушной среде, М.: Энергия, 1973 г., с.71-76), содержащий синхронизатор, соединенный с формирователем строба и генератором зондирующих сигналов, выход которого соединен с акустической системой, находящейся в акустическом контакте со средой лоцирования, и с входом приемного тракта, а его выход - со вторым входом формирователя строба, выход которого соединен с входом первого ждущего мультивибратора, а также со схемой "И", второй вход которой соединен с выходом генератора тактовых импульсов. Выход схемы "И" соединен со счетным входом счетчика, выходы которого через регистр соединены с цифровым индикатором. Вход первого ждущего мультивибратора соединен с входом разрешения записи регистра и с входом второго ждущего мультивибратора, выход которого соединен со входом сброса счетчика. Вход тактового генератора соединен с выходом блока управляющего сигнала, а его входы соединены с блоком датчиков.
Синхронизатор вырабатывает периодически повторяющиеся синхроимпульсы, запускающие формирователь строба, а также генератор зондирующих сигналов, с выхода которого радиоимпульс поступает на акустическую систему, излучающую в среду лоцирования акустический сигнал, распространяющийся в ней со скоростью с и отражающийся от границы среды лоцирования или объекта удаленных от акустической системы на расстоянии rх. Эхоимпульс принимается акустической системой и соответствующий ему электрический сигнал поступает на вход приемного тракта, где происходит его обработка по заданному алгоритму (усиление, фильтрация, детектирование и т.д.), после чего он поступает на второй вход формирователя строба и прекращает его работу.
Строб-импульс с выхода формирователя поступает на один из входов схемы "И", на второй вход которой подаются с генератора тактовых импульсов тактовые импульсы, частота которых fT равна с/2, где с - скорость звука в среде лоцирования. Пачка импульсов с выхода схемы "И" поступает на счетный вход счетчика, с выходов которого цифровой код, соответствующий числу импульсов n в пачке записывается в регистр и поступает на цифровой индикатор, показывающий число просчитанных импульсов n. Это число численно равно измеряемому расстоянию rх, если выполняется условие fT=с/2.
Для записи цифрового кода в регистр, а также для сброса счетчика перед новым циклом лоцирования вырабатываются два следующих друг за другом видеоимпульса. Для этого задний фронт импульса строба запускает первый ждущий мультивибратор, сигнал с выхода которого поступает на вход разрешения записи регистра, а также запускает второй ждущий мультивибратор, сигнал с выхода которого поступает на вход сброса счетчика.
Для подстройки частоты тактовых импульсов fT на вход тактового генератора с блока управляющих сигналов поступает напряжение, подстраивающее частоту тактового генератора, в зависимости от изменений температуры, давления, влажности и других параметров среды лоцирования. Напряжения, соответствующие значениям этих параметров, на входы блока управляющих сигналов поступают с блока датчиков.
Причинами, препятствующими достижению технического результата, являются ограниченные эксплуатационные возможности измерителя, обусловленные тем, что количество датчиков, установленных в блоке датчиков, ограничено и ряд параметров (состав среды лоцирования, наличие примесей и др.) не учитывается, что значительно снижает точность измерения. Кроме того, блок управляющего сигнала вырабатывает регулирующее напряжение только для какой-либо одной среды лоцирования, например воздушной. При переходе на другую среду лоцирования необходимо полностью менять набор датчиков и блок управляющих сигналов. Данное устройство также не может работать в автоматическом режиме.
Признаки, совпадающие с заявляемым объектом: синхронизатор, генератор зондирующих сигналов, акустическая система, приемный тракт, формирователь строба, схема "И", счетчик, регистр, цифровой индикатор, генератор тактовых импульсов, первый и второй ждущие мультивибраторы.
От ряда перечисленных недостатков свободен акустический измеритель расстояний (см. Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983 г., с.172), имеющий наибольшее количество совпадающих признаков с заявляемым объектом и содержащий синхронизатор, соединенный с формирователем строба и генератором зондирующих сигналов, выход которого через мультиплексор соединен с акустической системой, находящейся в акустическом контакте со средой лоцирования, а также со второй акустической системой, находящейся также в акустическом контакте с той же средой лоцирования, и на известном расстоянии r0 от которой расположен отражатель. Выход мультиплексора через приемный тракт соединен со вторым входом формирователя строба, выход которого соединен с входом первого ждущего мультивибратора, а также со схемой "И", второй вход которой соединен с выходом генератора тактовых импульсов. Выход схемы "И" соединен со счетным входом счетчика, выходы которого через регистр соединены с цифровым индикатором. Выход первого ждущего мультивибратора соединен с входом разрешения записи регистра и с входом второго ждущего мультивибратора, выход которого соединен со входом сброса счетчика.
Синхронизатор вырабатывает периодически повторяющиеся синхроимпульсы, запускающие формирователь строба, а также генератор зондирующих сигналов, с выхода которого радиоимпульс через мультиплексор поступает на акустическую систему, находящуюся в акустическом контакте со средой лоцирования и на расстоянии rх от которой расположена граница среды лоцирования или объект, до которого необходимо определить расстояние. При переключении мультиплексора радиоимпульс поступает на вторую акустическую систему, находящуюся в акустическом контакте с той же средой лоцирования и на известном расстоянии r0 от которой расположен отражатель. Электрические сигналы, соответствующие акустическим сигналам, отраженным от объекта (или от отражателя), с выхода мультиплексора поступают на приемный тракт, где происходит его обработка по заданному алгоритму, после чего он поступает на второй вход формирователя строба и прекращает его работу.
Строб-импульс с выхода формирователя поступает на один из входов схемы "И", на второй вход которой подаются с генератора тактовых импульсов тактовые импульсы, частота которых fT равна с/2, где с - скорость звука в среде лоцирования. Пачка импульсов с выхода схемы "И" поступает на счетный вход счетчика, с выходов которого цифровой код, соответствующий числу импульсов n в пачке, записывается в регистр и поступает на цифровой индикатор, показывающий число просчитанных импульсов n. Это число численно равно измеряемому расстоянию rx, если выполняется условие fT=с/2.
Для записи цифрового кода в регистр, а также для сброса счетчика перед новым циклом лоцирования вырабатываются два следующих друг за другом видеоимпульса. Для этого задний фронт импульса стробы запускает первый ждущий мультивибратор, сигнал с выхода которого поступает на вход разрешения записи регистра, а также запускает второй ждущий мультивибратор, сигнал с выхода которого поступает на вход сброса счетчика.
Перед началом измерений расстояния rx к генератору зондирующих сигналов с помощью мультиплексора подключают вторую акустическую систему и изменяют частоту тактового генератора до тех пор, пока цифровой индикатор не покажет величину r0, равную расстоянию между второй акустической системой и отражателем. Таким образом, осуществляется калибровка измерителя. После этого подключают к генератору зондирующих сигналов акустическую систему и измеряют расстояние rх.
Причинами, препятствующими достижению технического результата, являются ограниченные эксплуатационные возможности измерителя расстояний, обусловленные тем, что он не может работать в автоматическом режиме. Оператору необходимо периодически подключать вторую акустическую систему к генератору зондирующих сигналов и осуществлять вручную подстройку частоты генератора тактовых импульсов.
Все блоки данного измерителя расстояний содержатся в заявленном устройстве.
Задачей данного изобретения является расширение эксплуатационных возможностей измерителя расстояний, позволяющее ему работать в автоматическом режиме.
Технический результат изобретения заключается в том, что измеритель может работать в автоматическом режиме без присутствия оператора, выполняя автоматическую калибровку при изменении параметров среды лоцирования.
Технический результат достигается тем, что в устройство, содержащее синхронизатор, соединенный с формирователем строба и генератором зондирующих сигналов, выход которого через мультиплексор соединен с акустической системой находящейся в акустическом контакте со средой лоцирования, а также со второй акустической системой, находящейся в акустическом контакте с той же средой лоцирования и на известном расстоянии r0 от которой расположен отражатель; выход мультиплексора через приемный тракт соединен со вторым входом формирователя строба, выход которого соединен с входом первого ждущего мультивибратора, а также со схемой "И", второй вход которой соединен с выходом генератора тактовых импульсов, выход схемы "И" соединен со счетным входом счетчика, выходы которого через регистр соединены с цифровым индикатором; выход первого ждущего мультивибратора соединен со входом второго ждущего мультивибратора, выход которого соединен со входом сброса счетчика, дополнительно введены счетный триггер, вторая и третья схема "И", второй регистр, блок установки кода, блок сравнения цифровых кодов и блок управления; выход синхронизатора соединен со входом счетного триггера, а его прямой и инверсный выходы соединены с управляющими входами мультиплексора и с входами второй и третьей схемы "И", вторые входы которых соединены с выходом первого ждущего мультивибратора, а выходы с входами разрешения записи регистра и второго регистра; входы второго регистра соединены с выходами счетчика, а выходы со входами "А" блока сравнения цифровых кодов А и В, блок установки кода соединен со входами "В" блока сравнения цифровых кодов, выходы которого через блок управления соединены с управляющими входами генератора тактовых импульсов.
Изобретение поясняется чертежами. На фиг.1 показана структурная схема устройства, а на фиг.2 - эпюры напряжений в различных точках устройства.
Акустический измеритель расстояний содержит синхронизатор 1 соединенный с формирователем импульса строба 2, счетным триггером 3 и генератором зондирующих сигналов 4, выход которого через мультиплексор 5 соединен с акустической системой 6, находящейся в акустическом контакте со средой лоцирования 7, а также со второй акустической системой 8, находящейся в акустическом контакте со средой лоцирования 7 и на известном состоянии r0 от которой расположен отражатель 9; прямой и инверсный выходы счетного триггера 3 соединены с выходами второй 10 и третьей 11 схем "И", а также с управляющими входами мультиплексора 5, выход которого через приемный тракт 12 соединен со вторым входом формирователя строба 2, выход которого соединен с входом первого ждущего мультивибратора 13 и схемой "И" 14, второй вход которой соединен с выходом генератора тактовых импульсов 15, а выход - со счетным 19 выходом счетчиком 16, выходы которого через регистр 17 соединены с цифровым индикатором 18, а также через второй регистр 19 с входами "А" блока сравнения цифровых кодов А и В 20, выходы которого через блок управления 21 соединены с управляющим входом тактового генератора 15; выход первого ждущего мультивибратора 13 соединен с входом второго ждущего мультивибратора 22, а также со вторыми входами второй 10 и третьей 11 схем "И", выходы которых соединены соответственно со входами разрешения записи регистра 17 и второго регистра 19; выход второго ждущего мультивибратора 22 соединен с входом сброса счетчика 16, а блок установки кода 23 подключен ко входам "В" блока сравнения цифровых кодов 20. Синхронизатор 1 вырабатывает периодически повторяющиеся синхроимпульса U1, переключающие счетный триггер 3 и запускающие формирователь строба 2 и генератор зондирующих сигналов 4, с выхода которого радиоимпульс поступает через мультиплексор на акустическую систему 6 или на вторую акустическую систему 8, находящиеся в акустическом контакте со средой лоцирования 7 и излучающие в нее акустический импульсный сигнал, распространяющийся в среде и отражающийся от отражателя 9, расположенного на известном расстоянии r0 от акустической системы 8 или от границы среды лоцирования (или объекта находящегося в среде), удаленных от акустической системы на неизвестное расстояние rх. Переключение мультиплексора 5 осуществляется сигналами U2 и U3, снимаемыми с выходов счетного триггера.
Электрические сигналы, соответствующие акустическим эхоимпульсам, с выхода мультиплексора 5 поступают на вход приемного тракта, где осуществляется их обработка по заданному алгоритму (усиление, фильтрация, детектирование и др.). С выхода приемного тракта видеоимпульсы U4 поступают на второй вход формирователя строба и прекращают его работу. На выходе формирователя строба 2 формируются видеоимпульсы U5 с длительностями 2 r0/с и 2rх/с, где с - скорость звука в среде лоцирования. Сигнал U5 поступает на один из входов схемы "И" 14, на второй вход которой подаются тактовые импульсы, вырабатываемые генератором тактовых импульсов 15. На выходе схемы "И" 14 формируется пачка 22 импульсов U6, поступающая на счетный вход счетчика 16. Счетчик 16 подсчитывает количество импульсов n1 и n2 в пачке и цифровой код, соответствующий этим числам, поступает на входы регистров 17 и 19. Запись данных цифровых кодов в регистры осуществляется видеоимпульсами U7 и U8, выделяемыми на выходах соответственно второй и третьей схемы "И", на одни из входов которых подаются с выходов счетного триггера 3 напряжения U2 и U3, а на другие входы - видеоимпульс U9, вырабатываемый первым ждущим мультивибратором 13, запуск которого осуществляется задним фронтом видеоимпульса U5. После записи цифровых кодов в регистры 17 или 19 второй ждущий мультивибратор запускается задним фронтом видеоимпульса U9 и видеоимпульсы U10 с его выхода поступают на вход сброса счетчика и сбрасывают его на "ноль". Число n1, численно равное расстоянию rх, записывается в регистр 17 и с его выходов цифровой код поступает на цифровой индикатор, показывающий расстояние rx. Число n2, численно равное расстоянию r0, записывается во второй регистр 19 и цифровой код с его выходов поступает на входы "А" блока сравнения цифровых кодов 20, на входы "В" которого с блока установки кода 23 подается цифровой код расстояния r0. Блок сравнения цифровых кодов 20 сравнивает два цифровых слова "А" и "В" и на выходе блока формируются сигналы, соответствующие условиям А>В, А=В и А<В, которые поступают на блок управления 21, в котором вырабатывается напряжение, поступающее на управляющий вход генератора тактовых импульсов 15 и подстраивающее частоту тактовых импульсов таким образом, чтобы выполнялось условие А=В, то есть были равны цифровые коды, записываемые во второй регистр 19 и устанавливаемые в блоке установки кода 23. Это выполняется в том случае, если частота тактовых импульсов будет равна с/2, то есть произойдет автоматическая калибровка измерителя расстояний. Цифровой индикатор при этом покажет истинное расстояние rх.
Таким образом, в предлагаемом устройстве в результате введения новых блоков и связей: счетного триггера, второй и третьей схем "И", второго регистра, блоков сравнения цифровых кодов, установки кода и управления; выход синхронизатора соединен с входом счетного триггера, а его выходы соединены с управляющими входами мультиплексора и с входами второй и третьей схем "И", вторые входы которых соединены с выходом первого ждущего мультивибратора, а выходы - с входами разрешения регистра и второго регистра, выходы которого соединены с входами "А" блока сравнения цифровых кодов, его входы "В" соединены с блоком установки кода, а выходы - через блок управления с управляющим входом генератора тактовых импульсов, - появилась возможность работы измерителя расстояний в автоматическом режиме с автоматической калибровкой, что расширило эксплуатационные возможности измерителя расстояний.
Аппаратурная реализация предложенного устройства не вызывает каких-либо сложностей. Большинство блоков устройства являются стандартными и могут быть выполнены на имеющейся элементной базе. Например, мультиплексор реализуется на аналоговых ключах К561КТЗ, регистры К555ИР22, К555ИР27, блок сравнения цифровых кодов - микросхемы К555СП1, К561ИП2, блок управления и тактовый генератор можно выполнить по схемам, приведенным в статье "Простой синтезатор частот" - Я.Токарев, "Радио" №4, 2003 г., с.31-32, блок установки кода представляет собой набор перемычек, с помощью которых в соответствующих разрядах n-разрядного цифрового кода устанавливают значения "0" или "1".
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ СИГНАЛИЗАТОР ДЕФЕКТОВ К УЛЬТРАЗВУКОВОМУ ДЕФЕКТОСКОПУ | 2008 |
|
RU2357242C1 |
| Ультразвуковое устройство для контроля прочности бетона | 1984 |
|
SU1288581A1 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ ПРИ ИЗМЕРЕНИИ ДАЛЬНОСТИ И СЕЛЕКТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1999 |
|
RU2165072C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| Устройство для оценки функционального состояния головного мозга | 1989 |
|
SU1814871A1 |
| Ультразвуковое устройство для контроля прочности бетона | 1987 |
|
SU1467497A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 1992 |
|
RU2042195C1 |
| Ультразвуковой дефектоскоп | 1989 |
|
SU1727051A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЛИНЕЙНОГО ИЗМЕНЕНИЯ ЧАСТОТЫ ВНУТРИ ИМПУЛЬСА | 1989 |
|
RU2010243C1 |
| Способ внутричерепной диагностики и устройство для его осуществления | 1989 |
|
SU1708307A1 |

Изобретение относится к акустическим измерителям расстояний в различных средах. Техническим результатом изобретения является расширение эксплуатационных возможностей, измеритель может работать в автоматическом режиме без присутствия оператора, выполняя автоматическую калибровку при изменении параметров среды лоцирования. Устройство содержит синхронизатор 1, формирователь импульса строба 2, счетный триггер 3, генератор зондирующих сигналов 4, мультиплексор 5, акустическую систему 6, находящуюся в акустическом контакте со средой лоцирования, вторую акустическую систему 8, также находящуюся в акустическом контакте со средой лоцирования, отражатель 9, вторую 10 и третью 11 схемы "И", приемный тракт 12, первый ждущий мультивибратор 13, схему "И" 14, генератор тактовых импульсов 15, счетчик 16, регистр 17, цифровой индикатор 18, второй регистр 19, блок сравнения цифровых кодов 20, блок управления 21, второй ждущий мультивибратор 22 и блок установки кода 23. 2 ил.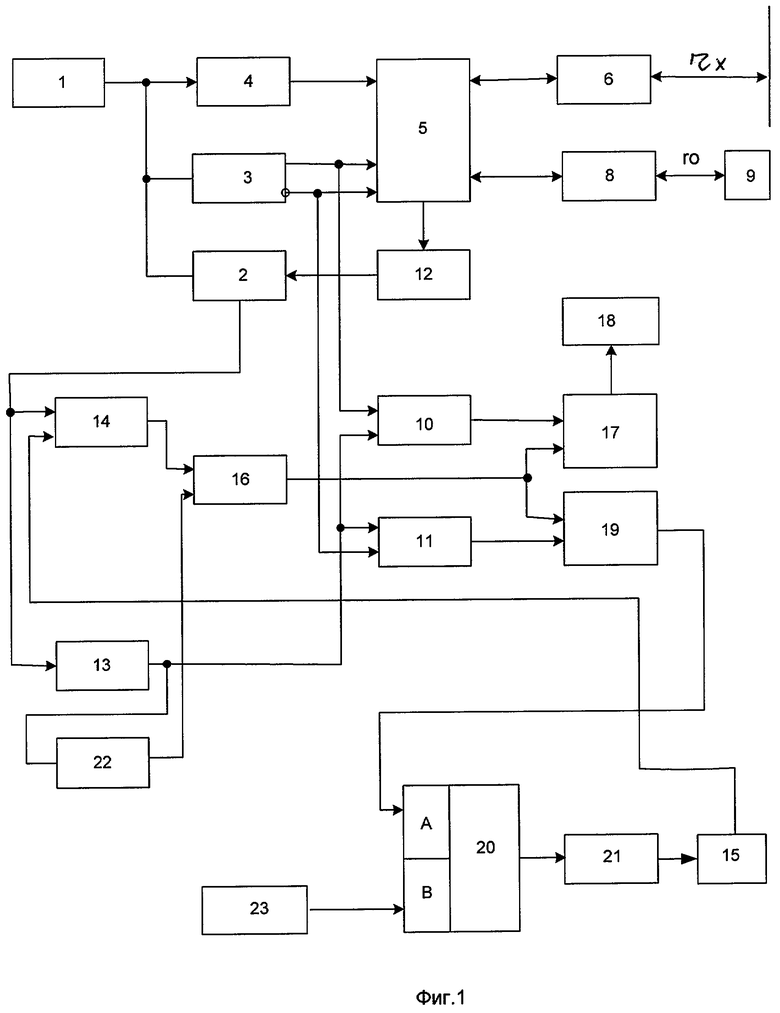
Акустический измеритель расстояния, содержащий синхронизатор, соединенный с формирователем строба и генератором зондирующих сигналов, выход которого через мультиплексор соединен с акустической системой, находящейся в акустическом контакте со средой лоцирования, а также со второй акустической системой, находящейся в акустическом контакте с той же средой лоцирования, и на известном расстоянии ro от которой расположен отражатель; выход мультиплексора через приемный тракт соединен со вторым входом формирователя строба, выход которого соединен с входом первого ждущего мультивибратора, а также со схемой "И", второй вход которой соединен с выходом генератора тактовых импульсов, выход схемы "И" соединен со счетным входом счетчика, выходы которого через регистр соединены с цифровым индикатором; выход первого ждущего мультивибратора соединен со входом второго ждущего мультивибратора, выход которого соединен со входом сброса счетчика, отличающийся тем, что в него дополнительно введены счетный триггер, вторая и третья схемы "И", второй регистр, блок установки кода, блок сравнения цифровых кодов и блок управления; выход синхронизатора соединен со входом счетного триггера, а его прямой и инверсный выходы соединены с управляющими входами мультиплексора и с входами второй и третьей схем "И", вторые входы которых соединены с выходом первого ждущего мультивибратора, а выходы - с входами разрешения записи регистра и второго регистра; входы второго регистра соединены с выходами счетчика, а выходы - со входами "А" блока сравнения цифровых кодов А и В, блок установки кода соединен со входами "В" блока сравнения цифровых кодов, выходы которого через блок управления соединены с управляющими входами генератора тактовых импульсов.
| Ультразвуковой импульсный измеритель расстояний | 1984 |
|
SU1201791A2 |
| Акустический измеритель расстояний | 1988 |
|
SU1656331A1 |
| RU 2052768 C1, 20.01.1996 | |||
| JP 55020458 А, 13.02.1980 | |||
| JP 10197632 А, 31.07.1998. | |||

