чателя опускания 26, диод 6, резистор 7, датчик 3, минусовая шина 2 (фиг. 1 и 2). При этом размыкающим контактом 34 переключателя 26 шина 49 отключится, а замыкающим контактом 32 включится шина 47 опускания, в конце опускания сначала датчик загрузки 5 данной ванны при ее загрузке положительным сигналом запрет диод 6, отключив обмотку 30 переключателя 26, затем замыкающим контактом 22 реле нижнего
Изобретение относится к позиционным устройствам автоматического управления, в частности к автооператорам гальванических ванн.
Цель изобретения - сокращение длительности цикла путем упрощения циклограммы работы гальваноавтомата.
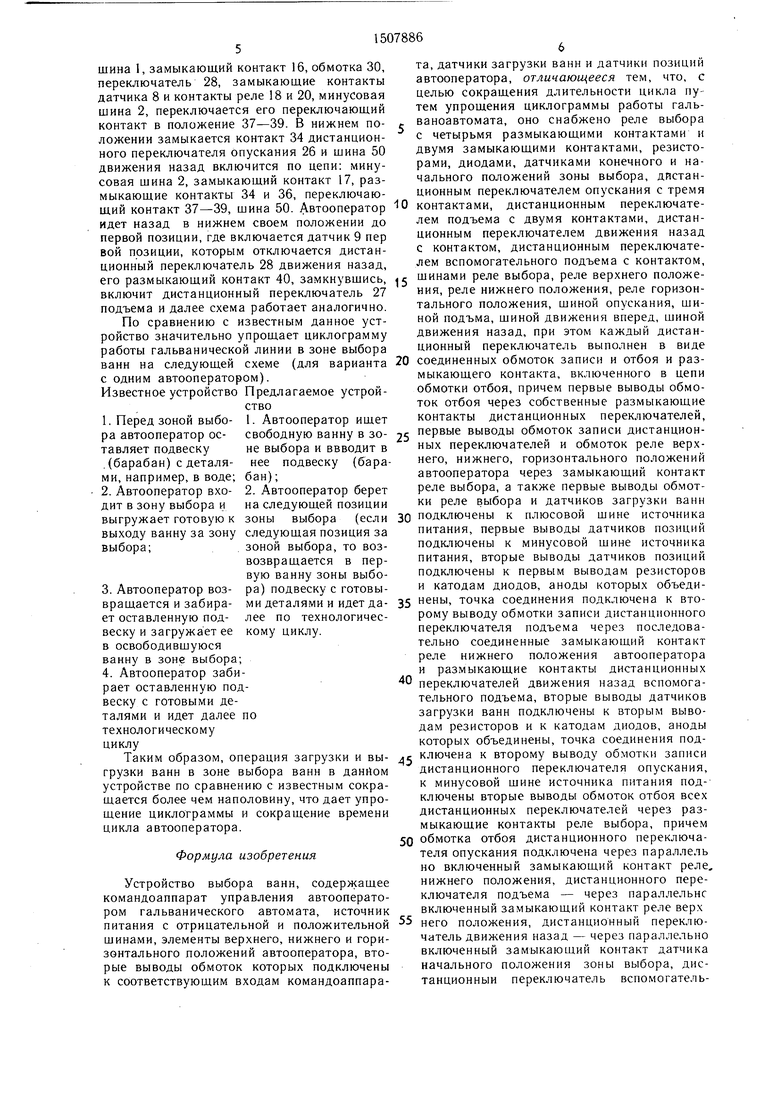
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - то же.
Устройство содержит положительную 1
и отрицательную 2 шины источника питания, положения 21 автооператора включится датчики позиций автооператора 3 с диода- обмотка отбоя 31 переключателя 26 по цепи: ми 4, датчики загрузки ванн 5 с диодами 6, плюсовая шина 1, размыкающий контакт 42, резисторы 7, датчик конечной позиции зоны обмотка 31, замыкающий контакт 22, мину- выбора 8, датчик начальной позиции зоны совая щина 2, переключатель 26 вернется выбора 9, командоаппарат 10 управления -15 исходное положение, размыкающий кон гальваническим автоматом, электромагнитное реле 11 выбора с размыкающими контактами 12-15, замыкающими контактами 16 и 17, реле верхнего положения 18 автооператора -с замыкающими контактами 19 и 20, pe;ie нижнего положения 21 автооператора с замыкающими контактами 22 и 23, реле горизонтального положения автоопера20
тора 24 с размыкающим контактом 25, дистанционные переключатели опускания 26,
такт 34 его замкнется и щина 49 снова включится, автооператор идет вперед до следующей позиции зоны выбора, которая по принципу работы устройства должна быть загружена. В момент включения дистанционного переключателя 26 на опускание его замыкающим контактом 33 включилась также обмотка записи 30 переключателя 29 вспомогательного подъема, разорвав цепь включения дистанционного переключателя подъподъема 27, движения назад 28, вспомога- ема 27 размыкающим контактом 41, что не,-ЧУ-Ч1 .., .
тельного подъема 29. Каждый дистанционный переключатель имеет обмотку записи 30 и обмотку отбоя 31, а также контакты, причем контакты 32, 33, 34 принадлежат переключателю 26, контакты 35 и 36 - переклюобходимо для того, чтобы автооператор не поднялся сразу на позиции опускания. Когда автооператор сойдет с позиции опускания, реле горизонтального положения 24 отключается, замкнув тем самым контакт 25 в цепи
чателю 27, контакт 37 с размыкающим 38 30 обмотки отбоя 31 дистанционного переклюи замыкающим 39 положением, а также контакт 40 - переключателю 28, контакт 41 - переключателю 29. Каждый дистанционный переключатель имеет собственный размыкающий контакт 42 в цепи обмотки отбоя. Связь устройства с командоаппаратом осуществляется через шины реле выбора 43, реле верхнего положения 44, реле нижнего положения 45, реле горизонтального положения 46, шину опускания 47, шину подъема
чателя 29, который, отключившись, замкнет контакт 41 в цепи обмотки переключателя вспомогательного подъема 29. При подходе к позиции обмотки записи 30 дистанционного переключателя подъема 27 включится по це- 35 пи: плюсовая шина 1, замыкающий контакт 16, обмотка 30, замыкаюший контакт 23 реле нижнего положения 21, размыкающие контакты 40 и 41, диод 4, замыкающий контакт 3 датчика позиции автооператора, ми48, шину движения вперед 49, движения .Q нусовая шина 2 (фиг. 1, фиг. 2). При вклюназад 50.
Устройство работает следующим образом.
При входе автооператора в зону выбора командоаппарат 10 дает команду на включечении замыкающего контакта 35 дистанционного переключателя 27, шина подъема 48 окажется включенной по цепи: минусовая шина 2, замыкаюший контакт 17, замыкаюший контакт 35, шина подъема 48.
ние реле выбора II, которое своими контак- 45 момент подъема щина 49 движения вперед
тами 12-15 разрывает цепи сброса обмоток отбоя 31, замыкающими контактами 16 и 17 подает питание на рабочую часть схемы, в результате чего шина 49 окажется включенной по цепи: минусовая шина 2, замыобесточится размыкающим контактом 36 дистанционного переключателя 27, который в конце подъема отключится замыкающим контактом 19 реле верхнего положения 18 автооператора. При этом снова замыкается
кающий контакт 17, размыкающие контак- 50 контакт 36, включается щина 49 движения
ты 34 и 36, переключающие контакты 37-38, шина 49. Автооператор идет вперед. При движении его через занятые позиции датчики загрузки ванн положительным сигналом запирают выход сигнала на опускание диодами 6. На свободной позиции датчик загрузки ванны разомкнут, при этом образуется цепь обмотки записи 30 дистанционного переключателя опуска 1ия 26: плюсовая шина 1, замыкающий контакт 16, обмотка 30 переклювперед, автооператор выходит из зоны выбора, реле 11 выбора отключается контактами 16 и 17. В том случае, если свободна последняя ванна зоны выбора, автооператор доходит до нее в верхнем своем положении, опускание происходит аналогично предыдущему, но при этом еще в верхнем положении автооператора включается датчик конечной позиции 8, включая дистанционный переключатель 28 движения назад по цепи: плюсовая
чателя опускания 26, диод 6, резистор 7, датчик 3, минусовая шина 2 (фиг. 1 и 2). При этом размыкающим контактом 34 переключателя 26 шина 49 отключится, а замыкающим контактом 32 включится шина 47 опускания, в конце опускания сначала датчик загрузки 5 данной ванны при ее загрузке положительным сигналом запрет диод 6, отключив обмотку 30 переключателя 26, затем замыкающим контактом 22 реле нижнего
положения 21 автооператора включится обмотка отбоя 31 переключателя 26 по цепи: плюсовая шина 1, размыкающий контакт 42, обмотка 31, замыкающий контакт 22, мину- совая щина 2, переключатель 26 вернется исходное положение, размыкающий кон
положения 21 автооператора включится обмотка отбоя 31 переключателя 26 по цепи: плюсовая шина 1, размыкающий контакт 42, обмотка 31, замыкающий контакт 22, мину- совая щина 2, переключатель 26 вернется исходное положение, размыкающий кон
такт 34 его замкнется и щина 49 снова включится, автооператор идет вперед до следующей позиции зоны выбора, которая по принципу работы устройства должна быть загружена. В момент включения дистанционного переключателя 26 на опускание его замыкающим контактом 33 включилась также обмотка записи 30 переключателя 29 вспомогательного подъема, разорвав цепь включения дистанционного переключателя подъема 27 размыкающим контактом 41, что неема 27 размыкающим контактом 41, что не .., .
обходимо для того, чтобы автооператор не поднялся сразу на позиции опускания. Когда автооператор сойдет с позиции опускания, реле горизонтального положения 24 отключается, замкнув тем самым контакт 25 в цепи
30 обмотки отбоя 31 дистанционного переключателя 29, который, отключившись, замкнет контакт 41 в цепи обмотки переключателя вспомогательного подъема 29. При подходе к позиции обмотки записи 30 дистанционного переключателя подъема 27 включится по це- 35 пи: плюсовая шина 1, замыкающий контакт 16, обмотка 30, замыкаюший контакт 23 реле нижнего положения 21, размыкающие контакты 40 и 41, диод 4, замыкающий контакт 3 датчика позиции автооператора, ми .Q нусовая шина 2 (фиг. 1, фиг. 2). При вклюнусовая шина 2 (фиг. 1, фиг. 2). При включении замыкающего контакта 35 дистанционного переключателя 27, шина подъема 48 окажется включенной по цепи: минусовая шина 2, замыкаюший контакт 17, замыкаюший контакт 35, шина подъема 48.
момент подъема щина 49 движения вперед
обесточится размыкающим контактом 36 дистанционного переключателя 27, который в конце подъема отключится замыкающим контактом 19 реле верхнего положения 18 автооператора. При этом снова замыкается
контакт 36, включается щина 49 движения
вперед, автооператор выходит из зоны выбора, реле 11 выбора отключается контактами 16 и 17. В том случае, если свободна последняя ванна зоны выбора, автооператор доходит до нее в верхнем своем положении, опускание происходит аналогично предыдущему, но при этом еще в верхнем положении автооператора включается датчик конечной позиции 8, включая дистанционный переключатель 28 движения назад по цепи: плюсовая
шина 1, замыкающий контакт 16, обмотка 30, переключатель 28, замыкающие контакты датчика 8 и контакты реле 18 и 20, минусовая шина 2, переключается его переключающий контакт в положение 37-39. В нижнем положении замыкается контакт 34 дистанционного переключателя опускания 26 и шина 50 движения назад включится по цепи: минусовая шина 2, замыкающий контакт 17, размыкающие контакты 34 и 36, переключаюта, датчики загрузки ванн и датчики позиций автооператора, отличающееся тем, что, с целью сокращения длительности цикла путем упрощения циклограммы работы гальваноавтомата, оно снабжено реле выбора с четырьмя размыкающими контактами и двумя замыкающими контактами, резисторами, диодами, датчиками конечного и начального положений зоны выбора, дистанционным переключателем опускания с тремя
щий контакт 37-39, шина 50. Авт ооператор О контактами, дистанционным переключате- идет назад в нижнем своем положении до лем подъема с двумя контактами, дистанционным переключателем движения назад с контактом, дистанционным переключателем вспомогательного подъема с контактом.
тального положения, шиной опускания, шиной подъма, шиной движения вперед, шиной движения назад, при этом каждый дистанционный переключатель выполнен в виде
первой позиции, где включается датчик 9 пер вой позиции, которым отключается дистанционный переключатель 28 движения назад, его размыкающий контакт 40, замкнувщись, 5 шинами реле выбора, реле верхнего положе- Бключит дистанционный переключатель 27 ния, реле нижнего положения, реле горизон- подъема и далее схема работает аналогично. По сравнению с известным данное устройство значительно упрощает циклограмму работы гальванической линии в зоне выбора ванн на следующей схеме (для варианта 20 соединенных обмоток записи и отбоя и раз- с одним автооператором).мыкающего контакта, включенного в цепи
Известное устройство Предлагаемое устрой- обмотки отбоя, причем первые выводы обмоствоток отбоя через собственные размыкающие
1. Перед зоной выбо- 1. Автооператор ищет контакты дистанционных переключателей, ра автооператор ос- свободную ванну в зо- 25 выводы обмоток записи дистанцион- тавляет подвескуне выбора и ввводит в нь1х переключателей и обмоток реле верх
.(барабан) с деталя- нее подвеску ми, например, в воде; бан);
(бара2. Автооператор вхо-2. Автооператор берет
дит в зону выбора ина следующей позиции
выгружает готовую кзоны выбора
выходу ванну за зонуследующая позиция за выбора;
зоной выбора, то воз- возвращается в первую ванну зоны выбо- 3. Автооператор воз- ра) подвеску с готовынего, нижнего, горизонтального положений автооператора через замыкающий контакт реле выбора, а также первые выводы обмотки реле выбора и датчиков загрузки ванн (если 30 подключены к плюсовой шине источника питания, первые выводы датчиков позиций подк тючены к минусовой шине источника питания, вторые выводы датчиков позиций подключены к первым выводам резисторов и катодам диодов, аноды которых объедивращается и забира- ми деталями и идет да- 35 ны, точка соединения подключена к второму выводу обмотки записи дистанционного переключателя подъема через последовательно соединенные замыкающий контакт реле нижнего положения автооператора и размыкающие контакты дистанционных переключателей движения назад вспомогательного подъема, вторые выводы датчиков загрузки ванн подключены к вторым выводам резисторов и к катодам диодов, аноды которых объединены, точка соединения подет оставленную подвеску и загружает ее в освободившуюся ванну в зоне выбора; 4. Автооператор забирает оставленную подвеску с готовыми деталями и идет далее по технологическому циклу
лее по технологическому циклу.
40
рому выводу обмотки записи дистанционного переключателя подъема через последовательно соединенные замыкающий контакт реле нижнего положения автооператора и размыкающие контакты дистанционных переключателей движения назад вспомогательного подъема, вторые выводы датчиков загрузки ванн подключены к вторым выводам резисторов и к катодам диодов, аноды которых объединены, точка соединения подТаким образом, операция загрузки и вы- очена к второму выводу обмотки записи
грузки ванн в зоне выбора ванн в данйом устройстве по сравнению с известным сокращается более чем наполовину, что дает упрощение циклограммы и сокращение времени цикла автооператора.
Формула изобретения
Устройство выбора ванн, содержащее командоаппарат управления автооператором гальванического автомата, источник питания с отрицательной и положительной шинами, элементы верхнего, нижнего и горизонтального положений автооператора, вторые выводы обмоток которых подключены к соответствующим входам командоаппарадистанционного переключателя опускания, к минусовой щине источника питания подключены вторые выводы обмоток отбоя всех дистанционных переключателей через размыкающие контакты реле выбора, причем 50 обмотка отбоя дистанционного переключателя опускания подключена через параллель но включенный замыкающий контакт реле, нижнего положения, дистанционного переключателя подъема - через параллельно включенный замыкающий контакт реле верх него положения, дистанционный переключатель движения назад - через параллельно включенный замыкающий контакт датчика начального положения зоны выбора, дистанционный переключатель вспомогатель55
та, датчики загрузки ванн и датчики позиций автооператора, отличающееся тем, что, с целью сокращения длительности цикла путем упрощения циклограммы работы гальваноавтомата, оно снабжено реле выбора с четырьмя размыкающими контактами и двумя замыкающими контактами, резисторами, диодами, датчиками конечного и начального положений зоны выбора, дистанционным переключателем опускания с тремя
контактами, дистанционным переключате- лем подъема с двумя контактами, дистанционным переключателем движения назад с контактом, дистанционным переключателем вспомогательного подъема с контактом.
шинами реле выбора, реле верхнего положе- ния, реле нижнего положения, реле горизон- соединенных обмоток записи и отбоя и раз- мыкающего контакта, включенного в цепи
тального положения, шиной опускания, шиной подъма, шиной движения вперед, шиной движения назад, при этом каждый дистанционный переключатель выполнен в виде
шинами реле выбора, реле верхнего положе- ния, реле нижнего положения, реле горизон- соединенных обмоток записи и отбоя и раз- мыкающего контакта, включенного в цепи
контакты дистанционных переключателей, 25 выводы обмоток записи дистанцион- нь1х переключателей и обмоток реле верх
него, нижнего, горизонтального положений автооператора через замыкающий контакт реле выбора, а также первые выводы обмотки реле выбора и датчиков загрузки ванн 30 подключены к плюсовой шине источника питания, первые выводы датчиков позиций подк тючены к минусовой шине источника питания, вторые выводы датчиков позиций подключены к первым выводам резисторов и катодам диодов, аноды которых объеди35 ны, точка соединения подключена к вто40
рому выводу обмотки записи дистанционного переключателя подъема через последовательно соединенные замыкающий контакт реле нижнего положения автооператора и размыкающие контакты дистанционных переключателей движения назад вспомогательного подъема, вторые выводы датчиков загрузки ванн подключены к вторым выводам резисторов и к катодам диодов, аноды которых объединены, точка соединения под очена к второму выводу обмотки записи
дистанционного переключателя опускания, к минусовой щине источника питания подключены вторые выводы обмоток отбоя всех дистанционных переключателей через размыкающие контакты реле выбора, причем 50 обмотка отбоя дистанционного переключателя опускания подключена через параллель но включенный замыкающий контакт реле, нижнего положения, дистанционного переключателя подъема - через параллельно включенный замыкающий контакт реле верх него положения, дистанционный переключатель движения назад - через параллельно включенный замыкающий контакт датчика начального положения зоны выбора, дистанционный переключатель вспомогатель55
ного подъема - через параллельно включенный размыкающий контакт реле горизонтального положения, кроме того, к минусовой шине источника питания подключен второй вывод обмотки записи дистанционного переключателя движения назад через последовательно в.ключенные замыкающие контакты реле верхнего положения автооператора и датчика конечного положения зоны выбора, второй вывод обмотки записи дисщине источника питаггия также подключены щина опускания через замыкающий контакт дистанционного переключателя опускания, шина подъема через последовательно соединенный замыкающий контакт дистанционного переключателя подъема, шина движения вперед через последовательно соединенные размыкающие контакты дистанционных переключателей опускания и подъема и замкнутое положение переключающего контакта
танционного переключателя вспомогатель- 10дистанционного переключателя движения
ного подъема - через замыкающий контактназад, шина движения назад аналогично
дистанционного переключателя опускания,через разомкнутое положение последнего,
через последовательно соединенный замы-шины опускания, подъема, движении вперед,
кающий контакт реле выбора, к минусовойназад, подключены к командоаппарату.
щине источника питаггия также подключены щина опускания через замыкающий контакт дистанционного переключателя опускания, шина подъема через последовательно соединенный замыкающий контакт дистанционного переключателя подъема, шина движения вперед через последовательно соединенные размыкающие контакты дистанционных переключателей опускания и подъема и замкнутое положение переключающего контакта
дистанционного переключателя движения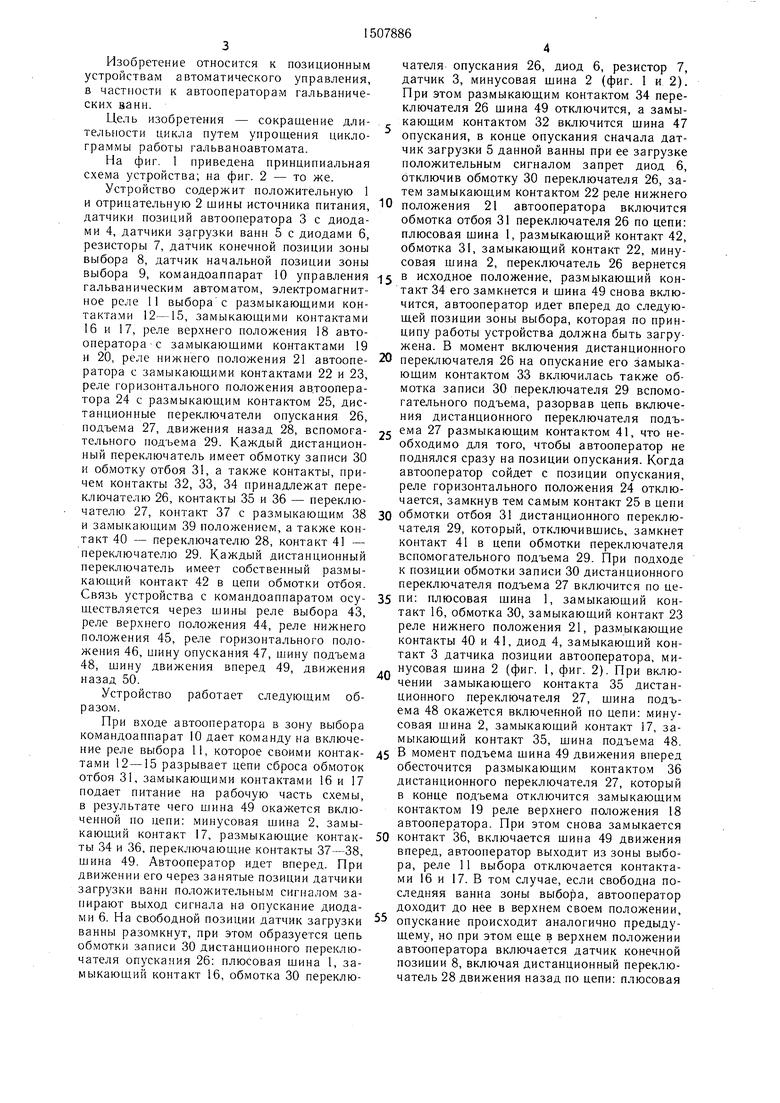
| название | год | авторы | номер документа |
|---|---|---|---|
| Коммутатор | 1985 |
|
SU1267503A1 |
| Коммутатор | 1988 |
|
SU1585845A2 |
| Устройство для управления межстаночным транспортером-накопителем | 1985 |
|
SU1278820A1 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| Коммутатор | 1977 |
|
SU645287A1 |
| Коммутатор | 1991 |
|
SU1826137A1 |
| Счетчик импульсов | 1981 |
|
SU1029414A1 |
| КОММУТАТОР | 1995 |
|
RU2096919C1 |
| Устройство для тревожной сигнали-зАции | 1979 |
|
SU849258A2 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
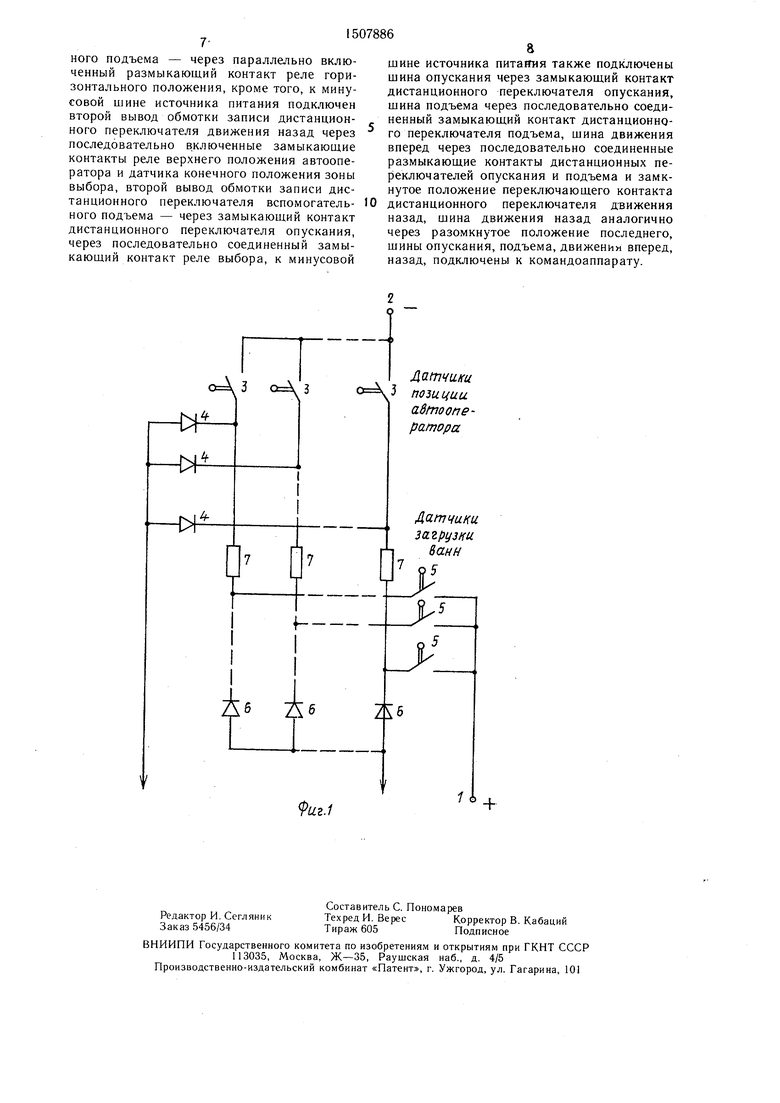
Изобретение относится к позиционным устройствам автоматического управления , в частности, к автооператорам гальванических ванн. Цель изобретения - сокращение длительности цикла путем упрощения циклограммы работы гальваноавтомата. Устройство содержит положительную 1, отрицательную 2 шины источника питания, датчики позиций автооператора с диодами, датчики загрузки ванн с диодами, резисторы, датчик конечной позиции зоны выбора 8, датчик начальной позиции зоны выбора 9, командоаппарат управления гальваническим автоматом 10, электромагнитное реле выбора с размыкающими контактами 12...15, замыкающими контактами 16, 17, реле верхнего положения 18 автооператора с замыкающими контактами 19 и 20, реле нижнего положения 21 автооператора с замыкающими контактами 22, 23, реле горизонтального положения автооператора 24 с размыкающим контактом 25, дистанционные переключатели опускания 26, подъема 27, движения назад 28, вспомогательного подъема 29. Каждый дистанционный переключатель имеет обмотку записи 30 и обмотку отбоя 31, а также контакты, причем контакты 32, 33, 34 принадлежат переключателю 26, контакты 35, 36 - переключателю 27, контакт 37 с размыкающим 38 и замыкающим 39 положениями, а также контакт 40 - переключателю 28, контакт 41 - переключателю 29. Каждый дистанционный переключатель имеет размыкающий контакт 42 в цепи обмотки отбоя. Связь устройства с командоаппаратом осуществляется через шины реле выбора 43, реле верхнего положения 44, реле нижнего положения 45, реле горизонтального положения 46, шину опускания 47, шину подъема 48, шину движения вперед 49, шину движения назад 50. 2 ил.
3 оА 3
иг.1
Датчики о позиции авто оператора
Датчики загруз ffи ванн
| Релейный коммутатор | 1986 |
|
SU1365171A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления автооператором полуавтоматических линий гальванопокрытий | 1977 |
|
SU708001A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
