(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОРОМ ПОЛУАВТОМАТИЧЕСКИХ ЛИНИЙ ГАЛЬВАНОПОКРЫТИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| КОМАНДОАППАРАТ ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОРОМ НА ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 1973 |
|
SU407978A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для управления автооператором полуавтоматической линии гальванопокрытий | 1984 |
|
SU1236015A1 |
| Устройство выбора ванн | 1988 |
|
SU1507886A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Автооператор | 1971 |
|
SU481524A1 |
| АВТООПЕРАТОРНАЯ ГАЛЬВАНИЧЕСКАЯ ЛИНИЯ | 1989 |
|
RU1816003C |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
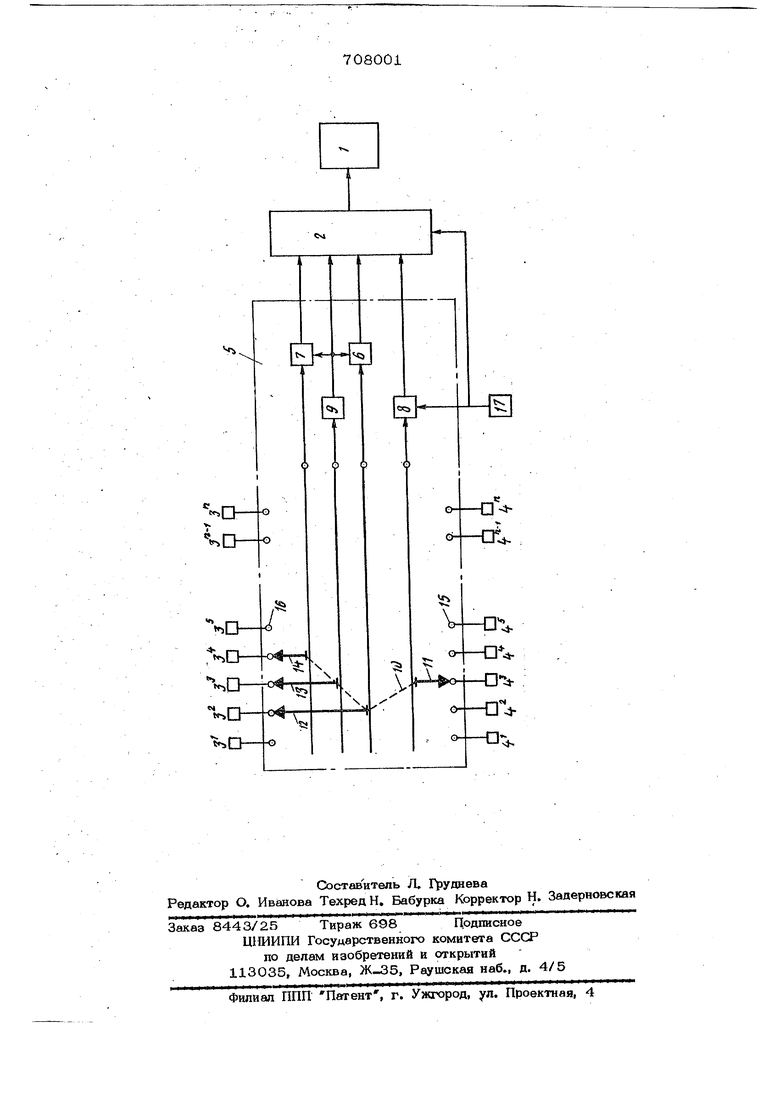
Изобретение относится к области гальванотехники и может быть использовано для управления автооператором полуавтоматических линий гальванопокрытий. Известны устройства для управления автооператором полуавтоматическихгальва- нических линий, содержащие исполнитель1ные механизмы, блок управления в датчи- 1КИ положения автооператора Jll. „ Эти устройства малопроизводитепьньГ и не удобны в управлении, так как ввгшу сложности определения направления и очередности перемещения, каждое перемещение исполнительных механизмов автооператора задается вручную отдельными командами. При незначительной степени автомягизадии они имеют большое количество аппаратов управления, которое практически возрастает пропорционально количеству ванн (позиций). Известно и другое устройство для управления автооператором полуавтоматичес ких линий гальванопокрытий, содержащее испол штельные механизмы, блок горизонтальных и вертикальных перемацений, датчики положения автооператора и датчики загрузки ванн 2. Данное устройство является наиболее близким к изобретению по технической сущности и достигаемому резульгату. Cteo содержит модулятор, позволяющий повысить маневренность автооператора, име-. кадего связь с датчиками положения автооператора и блоком горизонтальных и вертикальных перемещений. Модулятор пред-. ставляет собой электромеханическое устройство, на подвижной каретке которого укреплены магниты, воздействующие на гермоконтакты. Путем ручного перемещения каретки модулятора вдоль ряда задатчиков и поворачивания ее вокруг оси оператор производит одновременный выбор необходимых горизонтальных и вер;икальных перемещений и их очередности. Это устройство из-за наличия электромеханического модулятора не надежно в работе, сложно по конструкции, на удобно в управлении. Из-за отсутствия контроля и блокировок от загрузки ванн, и ручного, сравнительно трудоемкого и сложного способа задачи очередности перемещений модулятором, возможны ошибочные перемещения деталей на загруженную ванну. Это снижает производительность работы устройства и линии в целом, Целью изобретения является упроцение конструкции и повышение надежности работы устройства. Поставленная цель достигается тем, что оно содержит запоминающие элемен ты Вперед, Назад, Запрет подъема к Останов-опускание, соединенные с бло ком вертикальных и горизонтальных перемещений, переключатель со щетками и двумя полями непидвнжных контактов, чис ло которых в каждом поле равно числу ванн гальванолинии,соответственно подклю ченных к датчикам загрузки ванн и датчикам положения автооператора, причем одна из щеток переключателя подключена к контактам первого поля и элементу За прет подъема, а три другие щетки смонтированы изолированно друг от друга и подключены к трем соседним контактам второго поля и соответственно к элементам Вперед, Назад и Останов-опускание, На чертеже представлена блок-схема устройства. Оно содержит исполнительные механизмы 1, блок грризонтальных и вер тикальных перемещений 2, датчики положения автооператора 3 ... 3 ( ц чис ло ванн на линии), датчики з.агрузки ванн 4 ... 4 и ан.ализатор 5, содержащий запоминающие элементы 6-9 соответстве но Вперед, Назад, Запрет подъема и Останов-опускание, соединеннь1е с блоком вертикальных и горизонтальных перемещений, переключатель 10 со щет«. ками 11 14 и двумя полями неподвигкны контш тов 15, 16, число которых в каждом поле равно числу вайн линии, соотве ственно подключенных к датчикам, загруз ки ванн 4 и датчикам положения автоопе ратора 3, причем щетка 11 подключена элементу Запрет подъема и контактам 15,ащет1да 12-14 к трем соседним кон тактам 16 и соответственно к элементам Вперед, Назад и Останов-опускание Блок горизонтальных и вертикальных перемещений 2 по сигналам запоминаккци элементов 6-.9 и командной кнопки 17 Пуск отравляет исполнительными меха низмами 1 автооператора. Устройство работает следующим образом. Последовательность работы исполнительных механизмов 1 зависит от того, загру- жена или свободна ванна, на которую необходимо переместить автооператор. Если задаваемая адресным переключа- телем Ю ванна загружена, то от датчика , загрузки 4 данной ванны срабатывает запоминающий элемент 8 Запрет подъема и автооператор перемещается вперед или назад без подъема грузозахватов. Если задаваемая ванна не загружена, то запрета на подъем не поступает и происходит подъем грузозахватов, перемещение автооператора вперед или назад, останов над ванной и опускание грузозахватов. Направление перемацения автооператора, определяемое анализатором адресов, зависит от направления перемещения щеток 11-14 адресного переключателя от прежнего его положения. Предположим, автооператор находится над третьей ванной с опущеннъ1ми грузозахватами, а адресным переключателем 1О задается перемещение его на незагруженную -1 ванну, так как в исходном положении датчик 3 включен, то, при проходе щетки 12 через неподвижный контакт, к которому она подключена, срабатывает запоминакадий элемент 6 Вперед. Датчик загрузки ванны 4 не включен, и поэтому при установке щеток адресного переключателя в положение, соответствующее M-l ванне, запоминакяций элемент 8 Запрет подъема не подготовлен к включению. В этом случае, при нажатии кнопки 17 Пуск, запрет на подъем грузозахватов в блок горизонтальных и вертикальных перемещений 2 не поступает. Грузозахваты автооператора поднимаются вверх и по сигналу элемента 6 Вперед автооператор перемацается к t -1 ванне. При срабатывании датчика положения З включается элемент 9 Остановопускание, который подает отключакяций сигнал на элемент 6,. и одновременно с этим, сигнал на опускание грузозахватов. Автооператор останавливается, а грузозахваты опускаются в нижнее положение, цикл перемещений на этом заканчивается. Если автооператор необходимо переместить с V1-1 ванны на вторую загруженную ванну с целью ее выгрузки, то щетки адресного переключателя устанавливаются в соответствующее ей положение. При проходе щетки 13 через неподвижный контак 16, к которому подключен датчик з , включится запоминающий элемент 7 Назад. Датчик загрузки второй ванны 4 подготовит к включению элемент 8 Запрет подъема . При нахсатни кнопки 17 Пуск элемент 8 срабатывает, а по сиг налу элемента 7 блок горизонтальных и вертикальных перемещений 2 обеспечивает перемещение автоопервгора до второй ванны с опущенными грузозахватами. При приходе автооператора на вторую ванну от датчика 3 срабатывает элемент 9 и автооператор остгшавливается. Таким образом анализатор адресов в каждом конкретном случае автоматически выбирает количество и очередность перемещений и выдает сигналы на блок горизонтальных и вертикальных перемещений автооператооа. Оператор только устанавливает в необходимое пиложение щетки адресного переключателя и нажимает кноп ку Пуск. Путем оригинального использования связей между элементами, входящими в ссзстав устройства, а также конструкции а;фесного переключателя, упрощаются схемные и конструктивные рещеиия управления автооператором, повышается степен автоматизации, надежность и производител кость работы устройства. Использование наряду с датчиками положения автооператора и датчиков загрузки ванн упрощает управление и исключает ощибочные и аварийные перемещения автооператора. Устройство универсально по принципу действия и может быть выполнено в контактном и бесконтактном вариантах, пригодных для работы на постоянном и переменном токе. формула изобретения Устройство для управления автооперптором полуавтоматических линий гальванопокрытий, содержащее исполнительный механизм, блок горизонтальных и вертикальных перемещений, датчики положения автооператора и датчики загрузки ванн, отличающееся тем, что, с целью упрсцения конструкции и повыщения надежности работы устройства, оно снабжено анализатором адресов, содержащим за- поминакяцие элементы Вперед, Назад, Запрет подъема и Останов-опускание, соединенные с блоком вертикальных и горизонтальных перемшцений, и переключатель со щётками и двумя полями неподвижных контактов, число которых в каждом поле равно числу ванн линии, соответственно подключенных к датчикам загрузки ванн и датчикам положения автоопера- тора, причем одна из щеток переключателя подключена к контактам первого поля и элементу Запрет подьема, а три другие щетки смонтированы изолировано друг от друга и подключены к трем соседним контактам второго поля и соответственно к элементам Вперед , Назад, и Останов-опускание, Источники информации, принятые во внимание при экспертизе 1. Типовые автооператорные и каре-. точные автоматические линии для нанесения гальванических, химических и анодизашонных покрытий и их компоновка с использованием унифицированных, стандартизированных и нормализованных узлов. Командоаппараты. Научно-исследовательский институт информации по машиностроению, М., 1969, с. 152. 2.Авторское свидетельство CCCt- Ns 484266, кл. С 25 Б 21/12, 1975.
сч
S
t
a
i
04 r-I
