Изобретение относится к промышленному транспорту и может быть использовано для управления автооператорами, кранами-штабелерами, тележками для межоперационных передач и т п.
Цель изобретения - повышение надежности
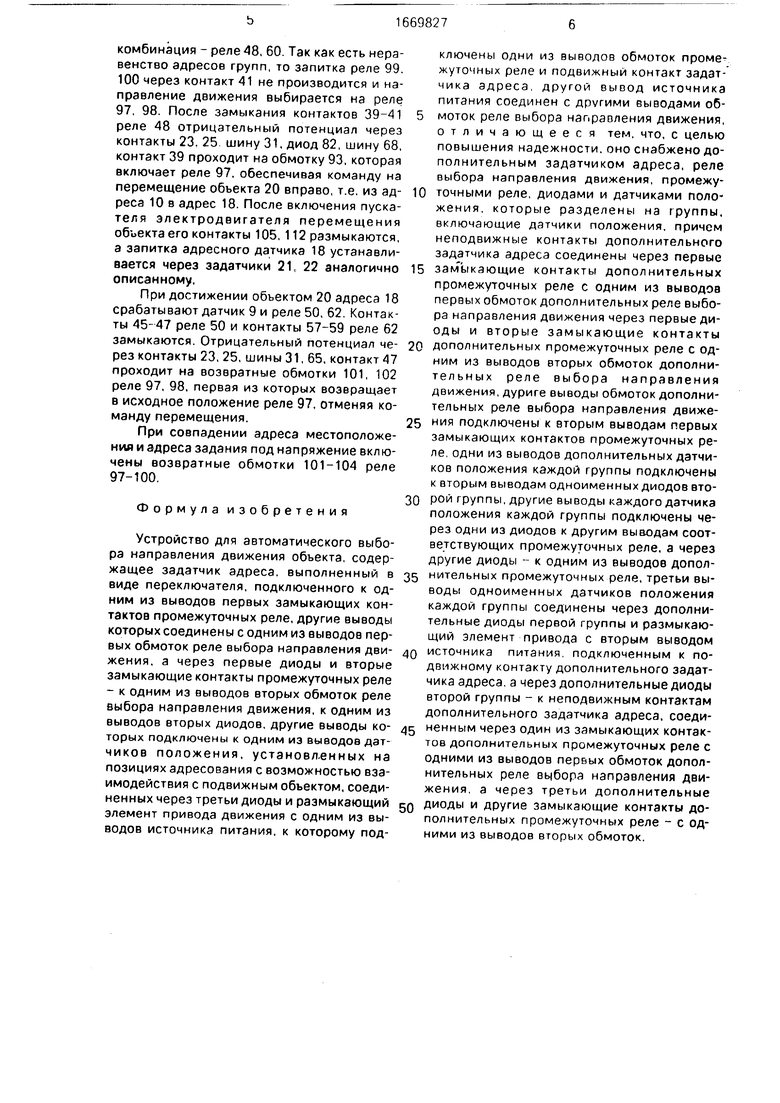
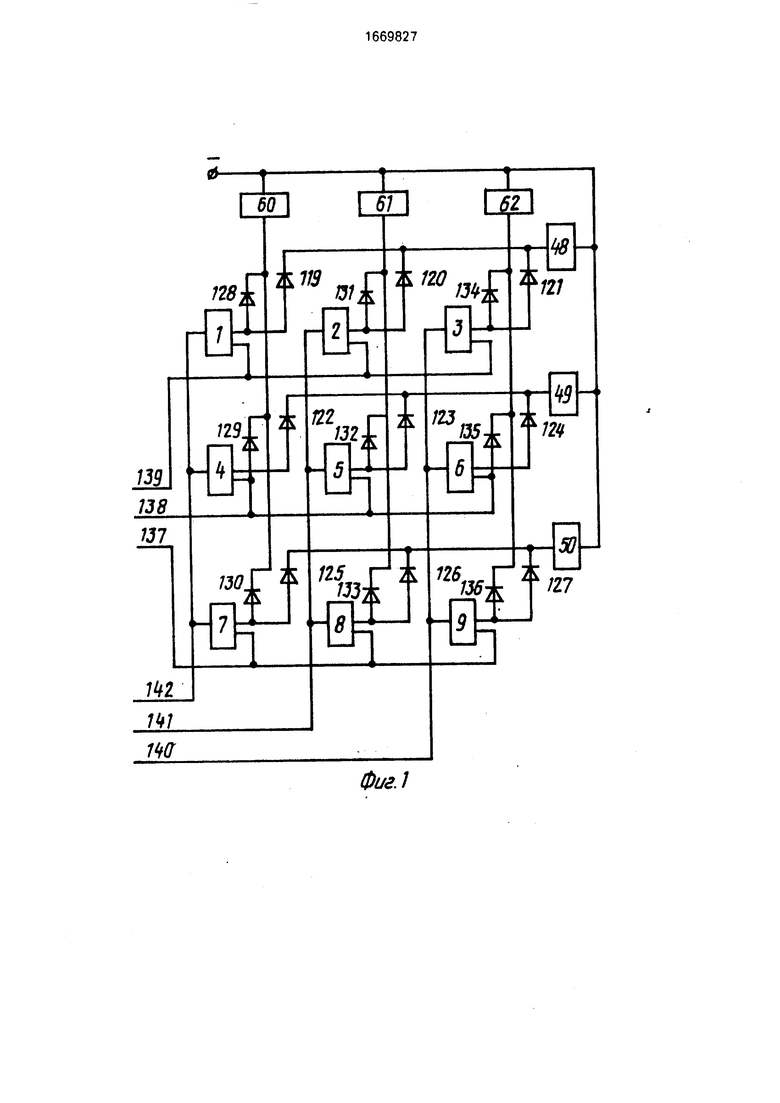
На фиг 1, 2 изображена принципиальная электрическая схема устройства, на фиг 3 - схема трассы движения объекта.
Устройство содержит датчики 1-9 положения, разделенные на группы 1-3,4-6, 7-9 и установленные на позициях 10-18 адресования трассы 19 движения с возможностью
взаимодействия с объектом 20, задатчики 21, 22 межгруппового и внутригруппового адреса с соответственно с подвижными контактами 23, 24 и 25-27, 28-30 неподвижными, подключенными соответственно к межгрупповым 31-33 и внутригрупповым 34-36 шинам адресования, межгруппового 37 и внутригруппового 38 блоков фактического положения, выполненных в виде замыкающих контактов 39-41, 42-44, 45-47 соответственно межгрупповых промежуточных реле 48-50 и 51-53, 54-56, 57-59 соответственно внутригрупповых промежуточных реле 60-62, при этом первые выводы
о &
о
,00
ю
блока 37 подключены к шинам 63-71, а первые выводы блока 38 подключены к шинам 72-80, причем элементы совпадения образованы перемычками шин 31-33,.34-36 соответственно на шины 65-63, 74-72, а тажке шины 67 на шину 31 через диод 81, шины 68 на шины 31, 33 соответственно через диоды 82, 83, шины 70 на шину 33 через диод 84, шины 71 на шины 32, 33 соответственно через диоды 85, 86, шины 76 на шину 34 через диод 87, шины 77 на шины 34, 35 соответственно через диоды 88, 89, шины 79 на шину 36 через диод 90, шины 80 на шины 35, 36 соответственно через диоды 91, 92, вторые выводы контактов 39, 42, 45 и 40, 43,
46блока 37 и контактов 51, 54, 57 и 52, 55, 58 блока 38 подключены соответственно к исполнительным обмоткам 93-96 двухобмо- точных реле 97-100 выбора направления движения, вторые выводы контактов 41, 44,
47блока 37 подключены к первым управляющим цепям возвратных обмоток 101, 102 соответственно реле 97, 98 и вторым управляющим цепям исполнительных 95,96 и возвратных 103, 104 обмоток соответственно реле 99, 100, вторые выводы контактов 53, 56,59 блока 38 подключены к первым управляющим цепям возвратных обмоток 103, 104, положительный вывод источника питания подключен к вторым управляющим цепям обмоток 93, 94, 101. 102, подвижному контакту 24 задатчика 22 и через первый размыкающий контакт 105 пускателя электродвигателя перемещения объекта, первую группу разделительлных диодов 106-108, 109-111 - к шинам 34-36, отрицательный вывод источника питания подключен к подвижному контакту 23 задатчика 21, к первым выводам управляющих обмоток реле 48-50, 60-62 и через второй размыкающий контакт 112 пускателя электродвигателя перемещения объекта, группы разделительных диодов 113-115, 116-118 - к шинам 31-33, в пределах каждой группы датчиков 1-3, 4-6, 7-9 их выводы подключены соответственно через разделительные диоды 119-121, 122-124,125-127 к вторым управляющим цепям соответственно реле 48-50, а также через разделительные диоды 128- 130, 131-133, 134-136 - к вторым управляющим цепям соответственно реле 60-62, в пределах каждой группы датчиков 1-3, 4-6, 7-9 их отрицательные выводы питания объединены в шины 139-137 и соответственно через диоды 116-118 подключены к шинам 31-33. положительные выводы питания реле 1, 4, 7, 2, 6, 8, 3, 6, 9 также соответственно объединены в шины 142-140 и подключены соответственно через диоды 109-111 к шинам 34-36.
Устройство работает следующим образом.
Например, подвижный контакт 23 за- датчика21 установлен на неподвижный контакт 27, подвижный контакт 24 задатчика 22 установлен на неподвижный контакт 30, что соответствует адресу 10, а подвижный объект 20 взаимодействует с датчиком 3, установленным в адресе 12. При подаче
0 напряжения на схему отрицательный потенциал через контакт 112, диоды 113-115 проходит на шину 137-138, а положительный через контакт 105, диоды 106-108-на шины 140-142, Таким образом, все датчики 1-9
5 оказываются запитанными, но срабатывает датчик 3, на который воздействует объект 20 и реле 48, 62. Контакты 39-41 реле 48 и контакты 57-59 реле 62 замыкаются. Отрицательный потенциал через контакты 23,27,
0 шины 33, 63, контакт 41 проходит на возвратные обмотки 101, 102 реле 97, 98, которые возвращаются в исходное положение, обмотки 95, 103, 96, 104 реле 99, 100. Теперь положительный потенциал через контакты
5 24, 40 шину 36, диод 92, шину 80, контакт 58 проходит на исполнительную обмотку 96, которая включает реле 100, обеспечивая команду на перемещение объекта 20 влево, т.е. из адреса 12 в адрес 10. После включе0 ния пускателя электродвигателя перемещения объекта его контакты 105, 112 размыкаются, а запитка адресного датчика 1 устанавливается через задатчики 21, 22. Отрицательный потенциал через кон5 такты 23, 27, шину 33, диод 118, шину 139 проходит на датчики 1-3, а положительный через контакты 23, 30, шину 36, диод 111, шину 142 проходит на датчики 1, 4, 7, т.е. полностью подключенным оказывается дат0 чик 1 адреса 10. При перемещении объекта 20 в адрес 10 срабатывает датчик 1 и реле 48, 60. Контакты 39-41 реле 48 и контакты 51-53 реле 60 замыкаются. Отрицательный потенциал по описанным цепям проходит
с на возвратные обмотки 101, 102 реле 97, 98 и обмотки 95, 103, 96, 104 реле 99, 100, а положительный через контакты 24, 30, шины 36, 72, контакт 53 - на возвратные обмотки 103, 104 реле 99, 100, вторая из которых
Q возвращает в исходное положение реле 100, отменяя команду перемещения.
Теперь объект 20 из адреса 10 переводится, например, в адрес 18. Подвижный контакт 23 задатчика 21 устанавливается на
е неподвижный контакт 25, а подвижный контакт 24 задатчика 22 устанавливается на не- подвижный контакт 28. При подаче напряжения на схему датчики 1-9 зэпитыва- ются аналогично описанному, но срабатывает датчик 1 адреса 10 и его выходная
комбинация - реле 48, 60. Так как есть неравенство адресов групп, то запитка реле 99. 100 через контакт 41 не производится и направление движения выбирается на реле 97, 98. После замыкания контактов 39-41 реле 48 отрицательный потенциал через контакты 23. 25 шину 31. диод 82, шину 68, контакт 39 проходит на обмотку 93, которая включает реле 97. обеспечивая команду на перемещение объекта 20 вправо, т.е. из адреса 10 в адрес 18. После включения пускателя электродвигателя перемещения объекта его контакты 105, 112 размыкаются, а запитка адресного датчика 18 устанавливается через задатчики 21, 22 аналогично описанному.
При достижении объектом 20 адреса 18 срабатывают датчик 9 и реле 50, 62. Контакты 45-47 реле 50 и контакты 57-59 реле 62 замыкаются. Отрицательный потенциал через контакты 23, 25, шины 31, 65. контакт 47 проходит на возвратные обмотки 101, 102 реле 97, 98. первая из которых возвращает в исходное положение реле 97, отменяя команду перемещения.
При совпадении адреса местоположения и адреса задания под напряжение включены возвратные обмотки 101-104 реле 97-100.
Формула изобретения
Устройство для автоматического выбора направления движения объекта, содержащее задатчик адреса, выполненный в виде переключателя, подключенного к одним из выводов первых замыкающих контактов промежуточных реле, другие выводы которых соединены с одним из выводов первых обмоток реле выбора направления движения, а через первые диоды и вторые замыкающие контакты промежуточных реле - к одним из выводов вторых обмоток реле выбора направления движения, к одним из выводов вторых диодов, другие выводы которых подключены к одним из выводов датчиков положения, установленных на позициях адресования с возможностью взаимодействия с подвижным объектом, соединенных через третьи диоды и размыкающий элемент привода движения с одним из выводов источника питания, к которому подключены одни из выводов обмоток промежуточных реле и подвижный контакт задат- чика адреса, другой вывод источника питания соединен с другими выводами об- 5 моток реле выбора направления движения, отличающееся тем, что, с целью повышения надежности, оно снабжено дополнительным задатчиком адреса, реле выбора направления движения, промежу0 точными реле, диодами и датчиками положения, которые разделены на группы, включающие датчики положения, причем неподвижные контакты дополнительного задатчика адреса соединены через первые
5 замыкающие контакты дополнительных промежуточных реле с одним из выводов первых обмоток дополнительных реле выбора направления движения через первые диоды и вторые замыкающие контакты
0 дополнительных промежуточных реле с одним из выводов вторых обмоток дополнительных реле выбора направления движения, дуриге выводы обмоток дополнительных реле выбора направления движе5 ния подключены к вторым выводам первых замыкающих контактов промежуточных реле, одни из выводов дополнительных датчиков положения каждой группы подключены к вторым выводам одноименных диодов вто0 рой группы, другие выводы каждого датчика положения каждой группы подключены через одни из диодов к другим выводам соответствующих промежуточных реле, а через другие диоды - к одним из выводов допол5 нительных промежуточных реле, третьи выводы одноименных датчиков положения каждой группы соединены через дополнительные диоды первой группы и размыкающий элемент привода с вторым выводом
Q источника питания, подключенным к подвижному контакту дополнительного задатчика адреса, а через дополнительные диоды второй группы - к неподвижным контактам дополнительного задатчика адреса, соеди5 ненным через один из замыкающих контактов дополнительных промежуточных реле с одними из выводов первых обмоток дополнительных реле выбора направления движения, а через третьи дополнительные
0 диоды и другие замыкающие контакты дополнительных промежуточных реле - с одними из выводов вторых обмоток.
Ж
138

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1490062A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1539148A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1461722A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1555246A2 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1778052A1 |
| Устройство выбора направления движения | 1990 |
|
SU1810900A1 |
| Устройство для автоматического выбора направления движения объекта | 1986 |
|
SU1406095A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |

Изобретение относится к промышленному транспорту и может быть использовано для управления автооператорами, кранами-штабелерами, тележками для межоперационных передач и т.п. Цель изобретения - повышение надежности. Устройство содержит датчики положения, разделенные на группы, задатчики адреса, промежуточные реле, реле выбора направления, движения, упоры. Задатчиками адреса устанавливается необходимая позиция адресования. При подаче питания срабатывает датчик положения, с которым взаимодействует объект. Включаются соответствующие промежуточные реле, которые подают питание на датчик положения, расположенный на заданной позиции адресования и реле выбора направления движения. По команде этих реле объект перемещается в установленном направлении к позиции адресования. При достижении последней срабатывает установленный на ней датчик положения. Соответствующие промежуточные реле отключают реле выбора направления движения. Объект останавливается на заданной адресной позиции. 3 ил.
Ш.
1М
Ж. т
Фиг.1
66 67 68 69 70 71
Фиг.2
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
