Известны следящие фотоэлектрические датчики, содержащие фотосопротивление, объектив, усилитель и наклонное зеркало, установленное по оси объекти-ва и приводимое электрическим серводвигателем. Однако указанные датчики не обеспечивают достаточной точности слежения.
В предлагаемом датчике повыщение точности слежения достигается тем, что схема датчика выполнена по принципу астатической следящей системы, для чего якорь серводвигателя включен на разность между выходным напряжением усилителя и постоянным напряжением смещения.
Кроме того, предлагаемый датчик обеспечивает расщирение объема информации благодаря применению блока выходных устройств, связанного с валом серводвигателя.
В предлагаемом датчике серводвигатель связан с зеркалом дистанционно через сельсинную пару и вместе с блоком выходных устройств пристроен к фотооптической головке и связан с зеркалом через механическую передачу.
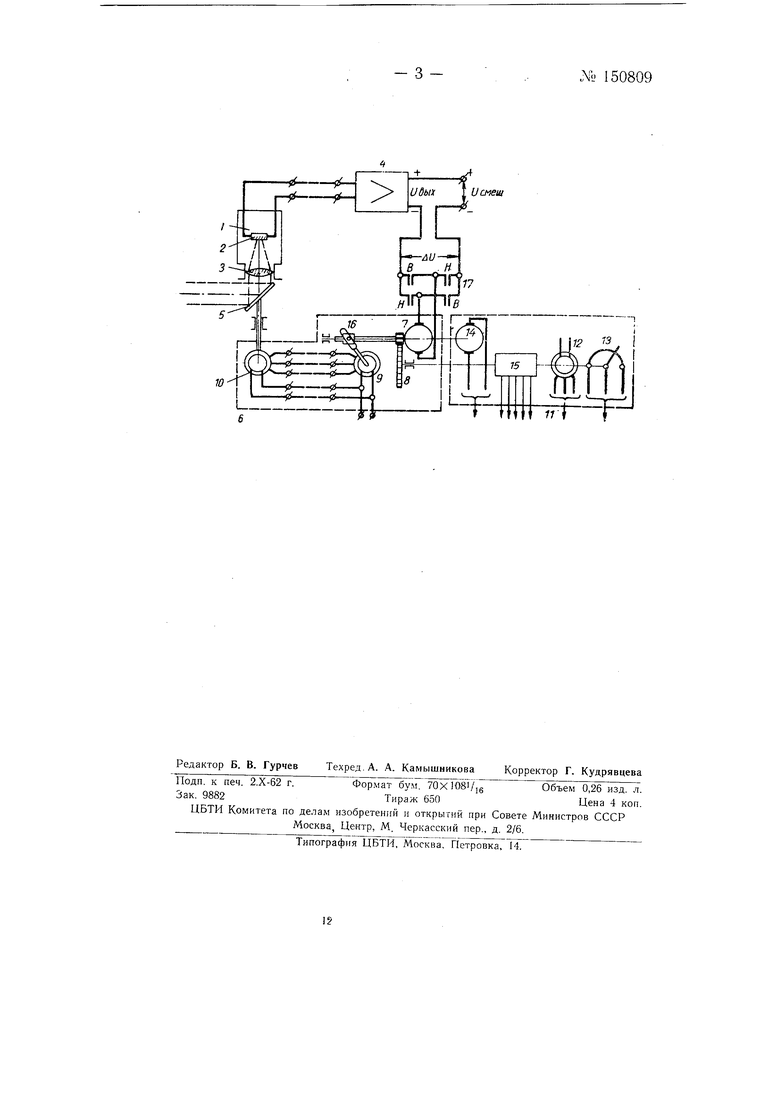
На чертеже изображена схема предлагаемого датчика, основными элементами которого являются: фотооптическая головка 7 с фотосопротввлением 2 и объективом 3; усилитель 4, наклонное зеркало 5, направляющее луч света, поступающий от объекта слежения, на объектив 3; электрический сервопривод 6, поворачивающий зеркало 5 в сторону объекта слежения и состоящий из серводвигателя 7 редуктора 5 и электрического вала, образуемого сельсинами 9 и 10, причем серводвига:ель 7 соединен с выходом усилителя 4 для получения обратной связи, делающей устройство замкнутой следящей системой. Кроме этого, в датчике имеется блок выходных устройств //, который состоит из сельсина 12, потенциометра 13, обеспечивающих непрерывное слежение за положением объекта, и тахогенератора 14, контролирующего скорость
№ 150809- 2 движения объекта. В блок выходных устройств//входит также путевой выключатель 15 на необходимое число цепей упр-авления.
Состав и количество -выходных устройств могут изменяться в зависимости от назначения датчика.
Поворот электромеханической системы датчика в исходное положение (до упора) происходит под действием постоянного напряжения J смещ , подводимого В якорную цепь серводвигателя от постороннего источника питания. (Если усилитель 4 имеет -двухтактную схему, то вместо этого может быть применено отрицательное смещение на входе усилителя).
Вхождение светящегося объекта в поле зрения датчика вызовет рост напряжения U выл- на выходе усилителя. Когда некоторая часть (например, 1/2) поля зрения окажется освещенной, величина.
У аых смет
станет положительной и серводвигатель начнет вращаться и поворачивать, зеркало в направлении движения объекта.
Если скорость вращения серводвигателя будет -постоянной (Af/ const), то передняя грань светящегося объекта будет занимать в поле зрения датчика неизменное положение, так как для выполнения равенства, где и смет и Af/ - постоянные величины, И также должно быть постоянным.
Таким образом, угловая погрещность астатического датчика, в отличие от статического, не зависит от угла поворота зеркала.
Для получения линейной зависимости между координатой конца объекта и углом поворота -валов выходных устройств может быть применен, например, кулисно-винтовой механизм 16.
Изменяя полярность серводвигателя с помощью реверсивной схемы 77, можпо переключать датчик на слежение переднего или заднего конца объектаПредмет изобретения
1.Следящий фотоэлектрический датчик, содержащий фотосопротивление, объектив, усилитель и наклонное зеркало, установленное -по оптической оси объектива и приводимое электрическим серводвигателем, отличающийся тем, что, с целью повыщения точности слежения путем выполнения схемы датчика по принципу астатической следящей системы, якорь серводвигателя включен иа разность между выходным напряжением усилителя и постоянным напряжением смещения.
2.Следящий фотоэлектрический датчик по п. 1, отличающийся тем, что для расщирения объема информадии применен блок выходных устройств, связанный с валом серводвигателя.
3.Следящий фотоэлектрический датчик по п 1, отличающийся тем, что серводвигатель связан с зеркалом дистанционно через сельсинную пару.
4.Следящий фотоэлектрический датчик .по п. 1, отличающийс я тем, что серводвигатель вместе с блоком выходных устройств пристроен к фотооптической головке и связан с зеркалом через механическую передачуFr F
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий фотоэлектрический датчик | 1960 |
|
SU133849A1 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ РЕГУЛЯТОР ПОЛОЖЕНИЯ СВЕТЯЩЕГОСЯ ОБЪЕКТА | 1967 |
|
SU197215A1 |
| Автоматический рефрактометр | 1960 |
|
SU137689A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1996 |
|
RU2160453C2 |
| Автоматический рефрактометр | 1959 |
|
SU130210A1 |
| ФОТОЭЛЕКТРИЧЕСКОЕ СЛЕДЯЩЕЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1950 |
|
SU100706A1 |
| Фотоэлектрическое устройство для автоматического измерения перемещений | 1976 |
|
SU657242A1 |