Из рбретение относится к способам автоматического управления процессом разделения в гидроциклоне и может быть использовано на обогатительных фабриках цветной и черной металлургии.
Целью изобретения является снижение удельного расхода электроэнергии на перекачку пульпы путем повышения КПД насоса при заданном качестве разделения пульпы.
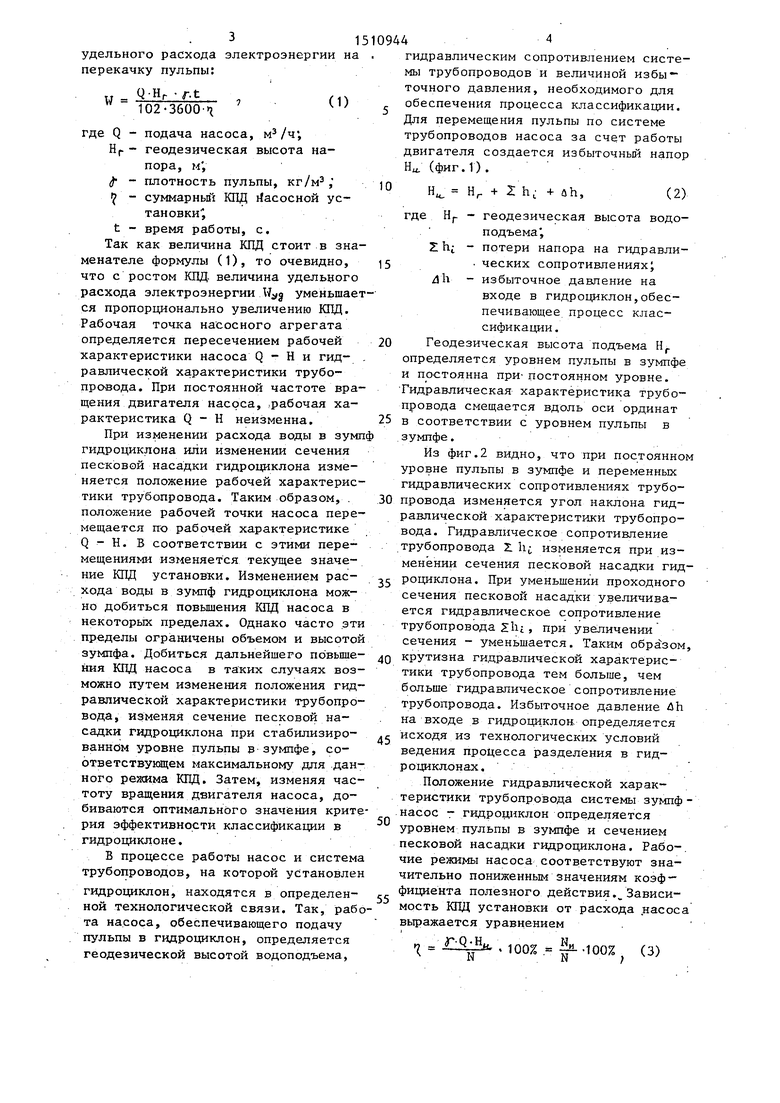
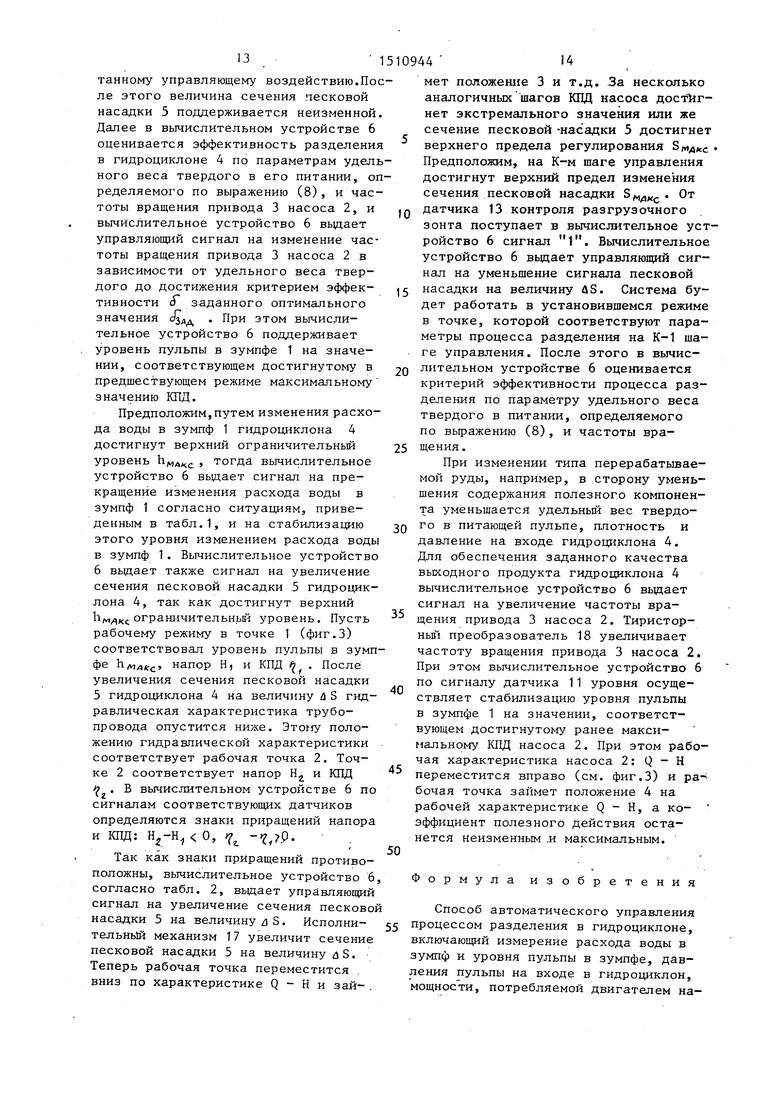
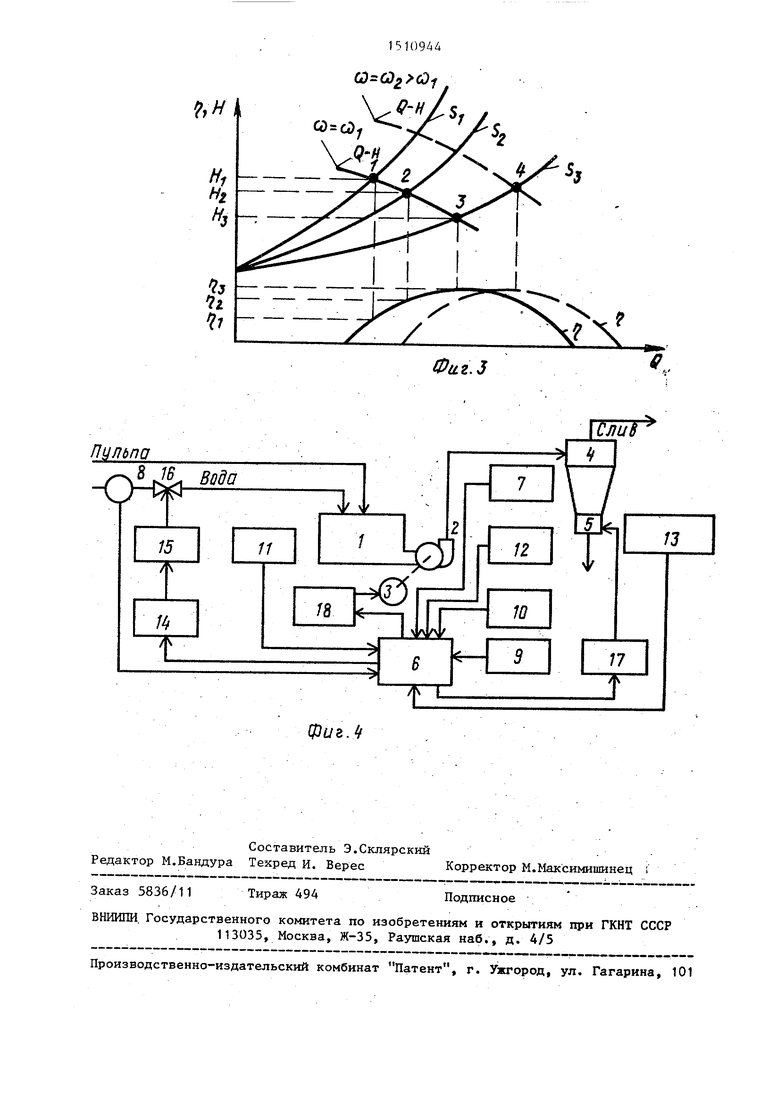
На фиг.1 представлена гидравлическая характеристика системы трубопроводов} на фиг,2 - изменение положения характеристики трубопровода при
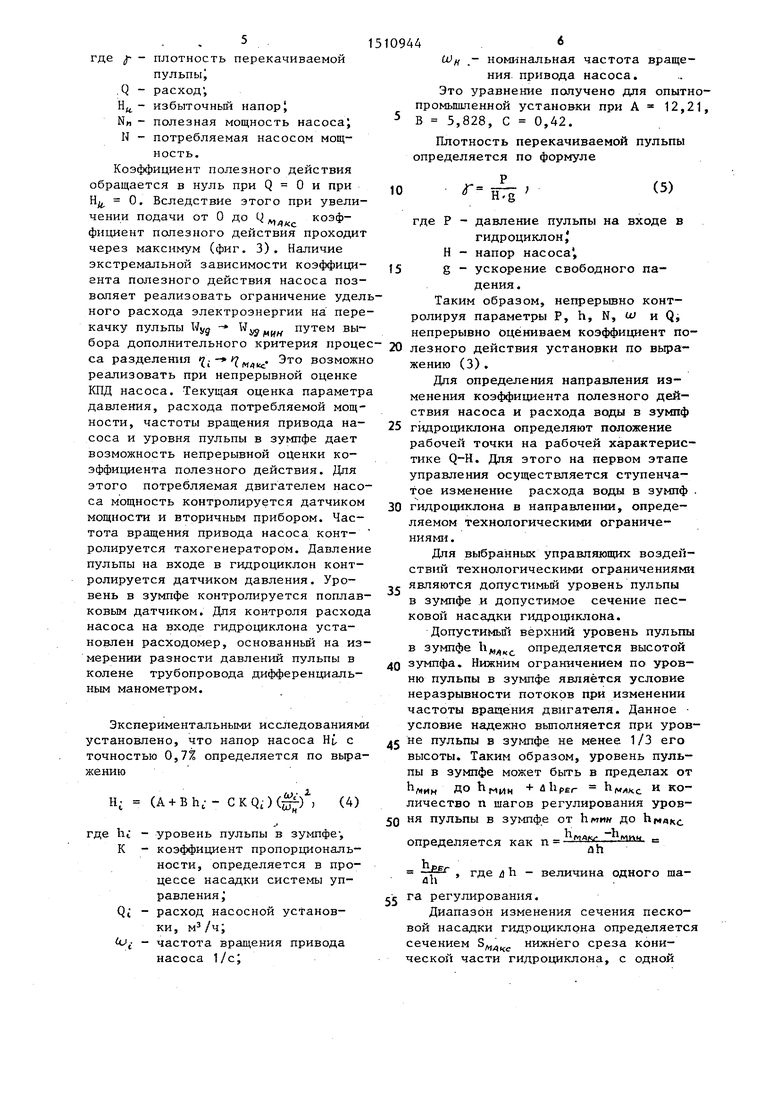
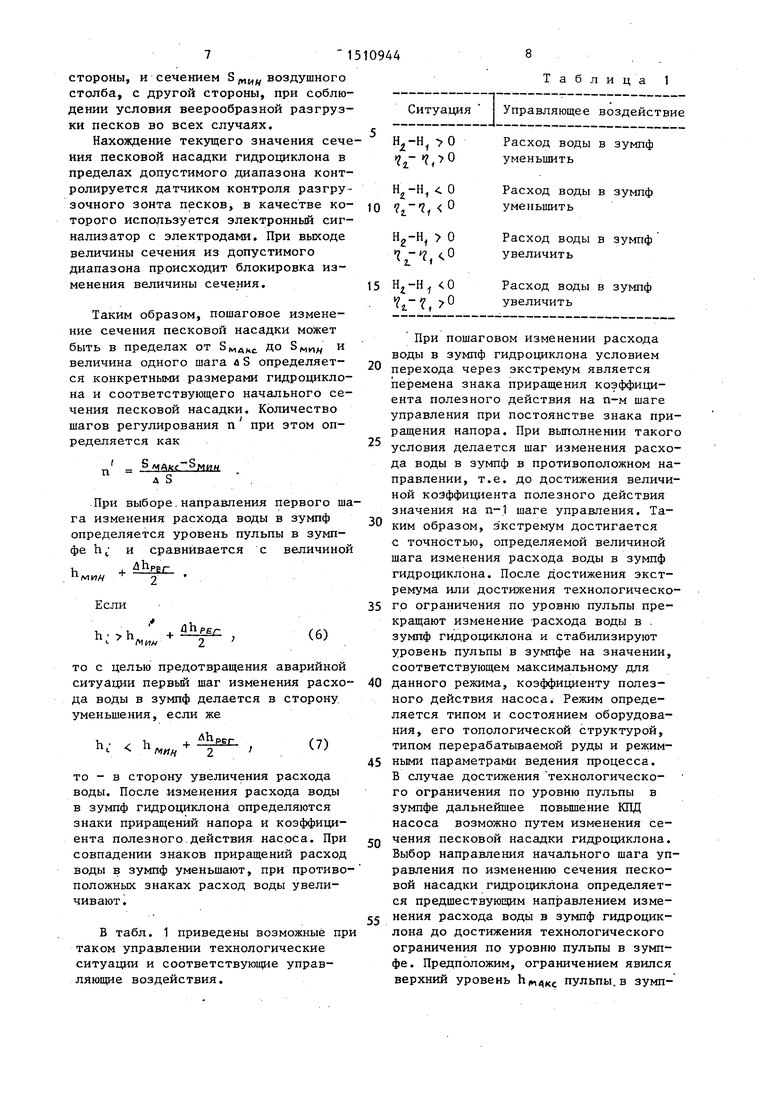
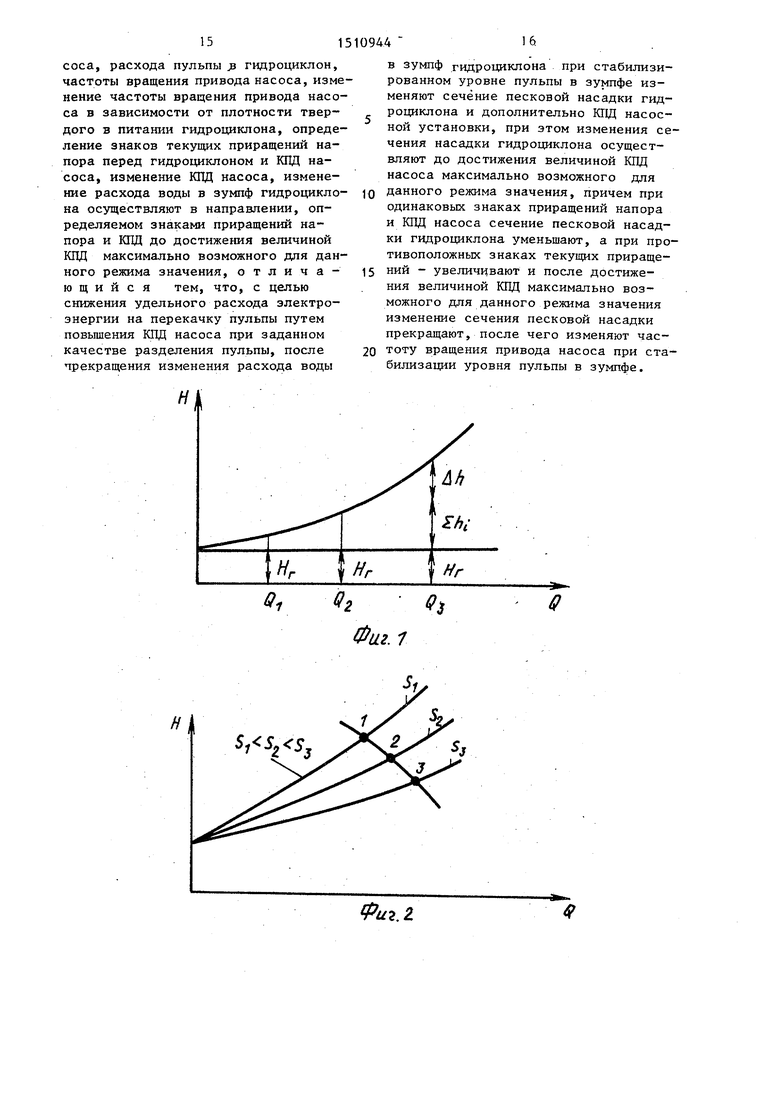
изменении сечения песковой насадки гидроциклона и влияние ее на рабочую точку HacocaJ на фиг.З - влияние из-, менения сечения песковой насадки гидроциклона и частоты вращения привода насоса на КПД и на положение рабочей точки насоса; на фиг.4 - структурная блок-схема, реализующая данный способ управления.
Способ автоматического управления осуществляется следующим образом.
Повышение коэффициента полезного действия насоса приводит к снижению
удельного расхода электроэнергии на перекачку пульпы:
W
r.t
(1)
102-3600-Ч
где Q - подача насоса,
Н - геодезическая высота напора, f-iV
If - плотность пульпы, кг/м , 1 - суммарный КПД Яасосной установки ,
t - время работы, с. Так как величина КПД стоит в знаменателе формулы (1), то очевидно, что с ростом КПД. величина удельного расхода электроэнергии Wyg уменьшается пропорционально увеличению КПД. Рабочая точка насосного агрегата определяется пересечением рабочей характеристики насоса Q - Н и гид- . равлической характеристики трубопровода. При постоянной частоте вращения двигателя насоса, .рабочая характеристика Q - Н неизменна.
При изменении расхода воды в зумп гидроциклона или изменении сечения Песковой насадки гидроциклона изменяется положение рабочей характеристики трубопровода. Таким образом, . положение рабочей точки насоса перемещается по рабочей характеристике Q - Н. В соответствии с этими перемещениями изменяется текущее значение КПД установки. Изменением расхода воды в зумпф гидроциклона можно добиться повьЕцения КПД насоса в некоторых пределах. Однако часто эти пределы ограничены объемом и высотой зумпфа. Добиться дальнейшего пбвьше- ния КПД насоса в таких случаях возможно путем изменения положения гидравлической характеристики трубопровода, изменяй сечение песковой насадки гидроциклона при стабилизированном уровне пульпы в зумпфе, соответствующем максимальному для .данного режима КПД. Затем, изменяя частоту вращения двигателя насоса, добиваются оптимального крите рия эффективности классификации в гидроцикдоне.
В процессе работы насос и система трубопроводов, на которой установлен
Положение гидравлической характеристики трубопровода системы зумпф- Насос - гидроциклон определяется уровнем пульпы в зумпфе и сечением песковой насадки гидроциклона. Рабо-. чие режимы насоса соответствуют значительно пониженным значениям коэффициента полезного действия.,Зависигидроциклон, находятся в определен- .j
ной технологической связи. Так, рабо- мость КПД установки от расхода насоса
та насоса, обеспечивающего подачу
пульпы в гидроцикпон, определяется
выражается уравнением
NM
7 - r-Q-H
N
100%
100% . (3)
геодезической высотой водоподъема.
гидравлическим сопротивлением системы трубопроводов и величиной избыточного давления, необходимого для обеспечения процесса классификации. Для перемещения пульпы по системе трубопроводов насоса за счет работы двигателя создается избыточньш напор Нц. (фиг. 1) .
10
Нг + 2 h + ah.
(2)
где
Zhi
4h
геодезическая высота водоподъема ,
потери напора на гидравлических сопротивлениях; избыточное давление на входе в гидроциклон,обеспечивающее процесс классификации.
Геодезическая высота подъема Н определяется уровнем пульпы в зумпфе и постоянна при- постоянном уровне. Гидравлическая характеристика трубопровода смещается вдоль оси ординат в соответствии с уровнем пульпы в зумпфе.
Из фиг.2 видно, что при постоянном уровне пульпы в зумпфе и переменных гидравлических сопротивлениях трубо- провода изменяется угол наклона гидравлической характеристики трубопровода. Гидравлическое сопротивление трубопровода изменяется при изменении сечения песковой насадки гидроциклона. При уменьшении проходного сечения песковой насадки увеличивается гидравлическое сопротивление трубопровода Zhi, при увеличении сечения - уменьшается. Таким образом, крутизна гидравлической характеристики трубопровода тем больше, чем больще гидравлическое сопротивление трубопровода. Избыточное давление ЛИ на входе в гидроциклок определяется исходя из технологических условий ведения процесса разделения в гид- роциклонах. . . .
Положение гидравлической характеристики трубопровода системы зумпф- Насос - гидроциклон определяется уровнем пульпы в зумпфе и сечением песковой насадки гидроциклона. Рабо-. чие режимы насоса соответствуют значительно пониженным значениям коэффициента полезного действия.,Зависи
выражается уравнением
NM
7 - r-Q-H
N
100%
N
где f- - плотность перекачиваемой пульпы)
.Q - расход;
Н - избыточный напорJ
NM - полезная мощность HacocaJ И - потребляемая насосом мощность.
Коэффициент полезного действия обращается в нуль при Q О и при Н; 0. Вследствие этого при увеличении подачи от О до Q коэффициент полезного действия проходит через максимум (фиг. 3). Наличие экстремальной зависимости коэффициента полезного действия насоса позволяет реализовать ограничение удельного расхода электроэнергии на перекачку пульпы Нуд - путем выбора дополнительного критерия процесса разделения возможно реализовать при непрерывной оценке КПД насоса. Текущая оценка параметра давления, расхода потребляемой мощности, частоты вращения привода насоса и уровня пульпы в зумпфе дает возможность непрерывной оценки коэффициента полезного действия. Для этого потребляемая двигателем насоса мощность контролируется датчиком мощности и вторичным прибором. Частота вращения привода насоса конт- ролируется тахогенератором. Давление пульпы на входе в гидроциклон контролируется датчиком давления. Уровень в зумпфе контролируется поплавковым датчиком. Для контроля расхода насоса на входе гидроциклона установлен расходомер, основанньй на измерении разности давлений пульпы в колене трубопровода дифференциальным манометром.
Экспериментальными исследованиями установлено, что напор насоса Hi, с точностью 0,7% определяется по вьфа- жению
ги-
Hi (A + Bhj- CKQ,)(5)
(4)
li; - уровень пульпы в зумпфе , К - коэффициент пропорциональности, определяется в процессе насадки системы управления j
Q; - расход насосной установки,
( - частота вращения привода насоса 1/cj
1510944
iOff - номинальная частота вращения, привода насоса. Это уравнение получено для опытно- промьшшенной установки при А 12,21, В 5,828, С 0,42.
Плотность перекачиваемой пульпы определяется по формуле
Г
H g
;
(5)
где Р - давление пульпы на входе в
гидроциклонi Н - напор насоса ,
g - ускорение свободного падения .
Таким образом, непрерьшно контролируя параметры Р, h, N, ш nQi непрерывно оцениваем коэффициент по- лезного действия установки по выражению (3) .
Для определения направления изменения коэффициента полезного действия насоса и расхода воды в зумпф гидроциклона определяют положение рабочей точки на рабочей характеристике Q-H. Для этого на первом этапе управления осуществляется ступенчатое изменение расхода воды в зумпф . гидроциклона в направлении, определяемом технологическими ограничениями .
Дпя выбранных управляющих воздействий технологическими ограничениями являются допустимый уровень пульпы в зумпфе и допустимое сечение пес- ковой насадки гидроцнклона.
Допустимьй верхний уровень пульпы в зумпфе Ьд, определяется высотой зумпфа. Нижним ограничением по уровню пульпы в зумпфе является условие неразрывности потоков при изменении частоты вращения двигателя. Данное условие надежно вьтолняется при уров- не пульпы в зумпфе не менее 1/3 его высоты. Таким образом, уровень пульпы в зумпфе может быть в пределах от h,,, до Ьг,л„ + all per . и количество п шагов регулирования уров- ня пульпы в зумпфе от Ьлтик до Ь,д
определяется как п .
, где л h - величина одного ша- дп
га регулирования.
Диапазон изменения сечения песко- вой насадки гидроциклона определяется сечением S нижнего среза конической части гидроциклона, с одной
стороны, и сечением S д,,,, воздушного столба, с другой стороны, при соблюдении условия веерообразной разгрузки песков во всех случаях.
Нахождение текущего значения сечения песковой насадки гидроциклона в пределах допустимого диапазона контролируется датчиком контроля разгрузочного зонта песков, в качестве которого используется электронньй сигнализатор с электродами. При выходе величины сечения из допустимого диапазона происходит блокировка изменения величины сечения.
Таким образом, пошаговое изменение сечения песковой насадки может быть в пределах от S до S,;, и величина одного шага л S определяется конкретными размерами гидроциклона и соответствующего начального сечения песковой насадки. Количество шагов регулирования п при этом определяется как
п
°
мин
4 S
При выборе.направления первого шага изменения расхода воды в зумпф определяется уровень пульпы в зумпфе h и сравнивается с величиной
+
Если h; h
Л1И//
(6)
то с целью предотвращения аварийной ситуации первьй шаг изменения расхода воды в зумпф делается в сторону уменьшения.
bj
/
(7)
То - в сторону увеличения расхода воды. После изменения расхода воды в зумпф гидроциклона определяются знаки приращений напора и коэффициента полезного.действия насоса. При совпадении знаков приращений расход воды в зумпф уменьшают, при противоположных знаках расход воды увеличивают .
В табл. 1 приведены возможные при таком управлении технологические ситуации и соответствующие управляющие воздействия.
Таблица 1
и
Ситуация Управляющее воздействие
H,j-H О
гг.° , о
1i-4
Hg-H, О
,0
0
Расход воды в зумпф уменьшить
Расход воды в зумпф уменьшить
Расход воды в зумпф увеличить
Расход воды в зумпф увеличить
0
5
0
5
0
5
0
5
При пошаговом изменении расхода воды в зумпф гидроциклона условием перехода через экстремум является перемена знака приращения коэффициента полезного действия на п-м шаге управления при постоянстве знака приращения напора. При выполнении такого условия делается шаг изменения расхода воды в зумпф в противоположном направлении, т.е. до достижения величиной коэффициента полезного действия значения на п-1 шаге управления. Таким образом, э кстремум достигается с точностью, определяемой величиной шага изменения расхода воды в зумпф гидроциклона. После достижения экстремума или достижения технологического ограничения по уровню пульпы прекращают изменение расхода воды в . зумпф гидроциклона и стабилизируют уровень пульпы в зумпфе на значении, соответствующем максимальному для данного режима, коэффициенту полезного действия насоса. Режим определяется типом и состоянием оборудования, его топологической структурой, типом перерабатываемой руды и режимными параметрами ведения процесса. В случае достижения технологического ограничения по уровню пульпы в зумпфе дальнейшее повышение КПД насоса возможно путем изменения сечения песковой насадки гидроциклона. Выбор направления начального шага управления по изменению сечения песковой насадки гидроциклона определяется предшествующим направлением изменения расхода воды в зумпф гидроциклона до достижения технологического ограничения по уровню пульпы в зумпфе. Предположим, ограничением явился верхний уровень h, пульпы, в зумпфе, т.е. изменение расхода воды осуществлялось в сторону увеличения уровня.
Увеличение расхода воды в зумпф гидроциклона соответствует уменьшению геодезической высоты подъема, что, в свою очередь, при прочих равных условиях, соответствует согласно уравнению (2) уменьшению напора насоса. При неизменном уровне пульпы в зумпфе, т.е. при Постоянной геодезической высоте подъема Н, и прочих равных условиях согласно уравнению (2) добиться уменьшения напора возможно уменьшением гидравлического сопротивления трубопровода Z tij-, что соответствует увеличению сечения пес ковой насадки гидроциклона и уменьшению крутизны гидравлической характеристики трубопровода (фиг. 2). Таким образом, направление первого шаг по изменению сечения песковой насадки гидроциклона определяется в зависимости от того, какой ограничитель- ньй (верхний или нижний) уровень был достигнут при регулировании. Если ограничением явился верхний уровень пульпы в зумпфе, первьй шаг по изменению сечения песковой насадки делается в сторону увеличения, если же ограничением явился нижний уровень пульпы в зумпфе, то первый шаг делается в сторону уменьшения сечения.
После этого определяются знаки приращений напора и КПД и сечение песковой насадки гидроциклона увеличивают при противоположных знаках напора и КПД и уменьшают при одинаковых знаках приращений напора и КПД.
Предположим, что был достигнут верхний уровень h пульпы в зумпфе Допустим, что этому уровню соответствует точка 1 на рабочей характеристике Q - Н (фиг.З). Первьш шаг изменения сечения песковой насадки делается в Сторону увеличения. После этого рабочая точка займет положение 2 на рабочей характеристике Q - Н, при этом крутизна гидравлической характеристики трубопровода уменьшается, ветви ее опускаются ниже. Определим знаки приращений для нового положения характеристики трубопровода: fj. Н,0. Так как знаки приращений напора и КПД противоположны, то сечение песковой насадки увеличивают.
В табл. 2 приведены возможные ситуации и соответствующие управлякйще воздействия.
Таблица 2
Ситуация Управляющее воздействие
1
Сечение песковой ки уменьшить
насад5
0
5
0
5
0
5
При шаговом изменении сечения песковой насадки гидроциклона условием перехода через экстремум является перемена знака приращения коэффициента полезного действия на К-м шаге управления при постоянстве знака приращения напора. При выполнении такого условия или при достижении технологического ограничения по изменению сечения песковой насадки делается шаг изменения сечения песковой насадки в противоположном направлении, т.е. до достижения величиной КПД значения на К-1 шаге управления. Таким образом, экстремум достигается с точностью, определяемой величиной шага изменения сечения насадки. После достижения экстремума или достижения технологического ограничения при изменении сечения песковой насадки гидроциклона оценивают критерий эффективности разделения и изменяют частоту вращения привода насоса до достижения критерием эффективности оптимального значения.
Пульпа из зумпфа 1 (фиг,4) откачивается насосом 2 с регулируемым приводом 3 в гидроциклон 4, снабженный регулируемой песковой насадкой 5. В вычислительное устройство (ВУ) 6 подаются сигналы от датчика 7 давления, установленного на входе гид- роциклона 4, датчика 8 расхода воды, датчика 9 мощности и датчика 10 частоты вращения привода 3 насоса 2, датчика 11 уровня и датчика 12 расхода пульпы, датчика 13 контроля
г 1
(8)
где
К
N
Р-
НgW
11 1
разгрузочного зонта. В ВУ 6 по сигналам датчика 11 уровня, датчика 12 расхода пульпы, датчика 10 частоты вращения привода 3 насоса 2 определяется напор, создаваемый насосом 2, по выражению (4). Плотность перекачиваемой пульпы определяется по сигналам датчика 7 давления и датчика 11 уровня по выражению (5) . По сигналам датчика 7 давления, датчика 8 расхода воды в зумпф и датчика 9 мощности рассчитывается удельный вес твердого в пульпе по формуле
К N(P-H g) Hg(KN-PW)
cf- плотность твердого в пульпе, т/м J константа
мощность двигателя насоса, кВт;
давление пульпы на входе гидроциклона, кг/см , напор, развиваемой насосом, Mj
ускорение свободного падения, расход воды в зумпф гидроциклона, м.
По сигналам датчика 11 уровня, датчика 12 расхода пульпы и датчика 9 мощности рассчитьшается коэффициент полезного действия насоса по выражению (3).
В вычислительном устройстве 6 определяется направление первого шага изменения расхода воды в зумпф 1 гидроциклона 4 исходя из логических условий (6) и (7). Далее в вычислительном устройстве 6 определяются знаки текущих приращений напора и коэффициента полезного действия и определяется направление следующего шага изменения расхода воды. Уп- равляющ -1й сигнал от вычислительного устройства 6 через усилитель 14 поступает на исполнительньй механизм 1 регулирующего органа 16 подачи воды который изменяет расход воды в зумп 1 гидроциклона 4 согласно выработан
ному управляющему воздействию. I
За несколько аналогичных шагов для этого режима КПД насоса достигнет максимального значения. При достижении экстремума вычислительное устройство 6 подключает контур регулирования качества выходного продукта гидроциклона 4 по параметрам
12
5
0
5
0
5
0
удельного веса твердого в питании, определяемого по выражению (8), путем изменения частоты вращения привода насоса при стабилизации уровня в зумпфе 1. При достижении технологического ограничения по уровню пульпы в зумпфе 1 вычислительное устройство 6 вьщает сигнал на прекращение изменения расхода воды в зумпф 1 в зависимости от знаков приращений напора и К1Щ насосной установки и сигнал на стабилизацию уровня пульпы в зумпфе 1 на этом значении. После этого в вычислительном устройстве 6 оценивается значение достигнутого ограничительного уровня пульпы в зумпфе 1: Ь., или МА((С- Если достигнут верхний ограничительньй уровень h(v,rt4ts вьгчислительное устройство 6 вьдает управляющий сигнал исполнительному механизму 17 на увеличение сечения песковой насадки 5 гидроциклона 4, если же достигнут
5. нижний ограничительный уровень Ьмин, то вычислительное устройство 6 выдает управляющий сигнал на уменьшение сечения песковой насадки 5. Затем в вычислительном устройстве 6 оцени-
0 ваются знаки текущих приращений напора и КПД и вьиается сигнал на изменение сечения песковой насадки гидроциклона согласно табл. 2 в зависимости от имеющейся ситуации. За несколько аналогичных шагов система вьйдет на режим работы с максимальным коэффициентом полезного действия насоса. При этом непрерывно контролируется процесс разгрузки песков гид- роциклона 4. В случае максимального разгрузочного зонта,соответствующего сечению S/VIAKC, от датчика 13 разгрузочного зонта в вычислительное устройство 6 поступает сигнал 1, в случае отсутствия веерообразной разгрузки, от датчика 13 поступает сигнал О, что соответствует достижению нижнего предела изменения сечения . В этих случаях, а также в случае перемены знака приращения КПД при сохранении знака приращения напора, что соответствует переходу через экстремум, вычислительное устройство 6 вьщает управляющий
5 сигнал на изменение сечения насадки 5 в противоположном направлении на величину л S. Исполнительньй механизм . 17 изменяет сечение песковой насадки 5 гидроциклона 4 согласно выработaннo fy управляющему воздействию.После этого величина сечения песковой насадки 5 поддерживается неизменной. Далее в вычислительном устройстве 6 оценивается эффективность разделения в гидроциклоне 4 по параметрам удельного веса твердого в его питании, определяемого по выражению (8), и частоты вращения привода 3 насоса 2, и вычислительное устройство 6 вьщает управляющий сигнал на изменение частоты вращения привода 3 насоса 2 в зависимости от удельного веса твердого до достижения критерием эффективности Г заданного оптимального значения с)здд . При этом вычислительное устройство 6 поддерживает уровень пульпы в зумпфе 1 на значении, соответствующем достигнутому в предшествующем режиме максимальному значению КПД.
Предположим,путем изменения расхода воды в зумпф 1 гидроциклона 4 достигнут верхний ограничительньй уровень тогда вычислительное устройство 6 выдает сигнал на прекращение изменения расхода воды в зумпф 1 согласно ситуациям, приведенным в табл.1, и на стабилизацию этого уровня изменением расхода воды в зумпф 1. Вычислительное устройство 6 вьвдает также сигнал на увеличение сечения песковой насадки 5 гидроциклона 4, так как достигнут верхний h, ограничительньй уровень. Пусть рабочему режиму в точке 1 (фиг.З) соответствовал уровень пульпы в зумп фе h, напор Н, и КПД . После увеличения сечения песковой насадки 5 гидроциклона 4 на величину и 5 гидравлическая характеристика трубопровода опустится ниже. Этому положению гидравлической характеристики соответствует рабочая точка 2. Точке 2 соответствует напор Н и КПД f . В вычислительном устройстве 6 по сигналам соответствующих датчиков определяются знаки приращений напора и КПД: О, Y --г.Р.
Так как знаки приращений противоположны, вычислительное устройство 6 согласно табл. 2, вьвдает управляющий сигнал на увеличение сечения песковой насадки 5 на величину /) S. Исполни- тельнь1й механизм 17 увеличит сечение песковой насадки 5 на величину uS. Теперь рабочая точка переместится вниз по характеристике Q - Н и зай0
5
0
5
мет положеш е 3 и т.д. За несколько аналогичных шагов КПД насоса дост Иг- нет экстремального значения или же сечение песковой -насадки 5 достигнет верхнего предела регулирования Предположим, на К-м шаге управления достигнут верхний предел изменения сечения песковой насадки S. От датчика 13 контроля разгрузочного зонта поступает в вычислительное устройство 6 сигнал t. Вычислительное устройство 6 вьщает управляющий сигнал на уменьшение сигнала песковой насадки на величину ЛЗ. Система будет работать в установившемся режиме в точке, которой соответствуют параметры процесса разделения на К-1 шаге управления. После этого в вычислительном устройстве 6 оценивается критерий эффективности процесса разделения по параметру удельного веса твердого в питании, определяемого по выражению (8), и частоты вращения.
При изменении типа перерабатьшае- мой руды, например, в сторону уменьшения содержания полезного компонента уменьшается удельньш вес твердого в питающей пульпе, плотность и давление на входе гидроциклона 4. Для обеспечения заданного качества выходного продукта гидроциклона 4 вычислительное устройство 6 вьщает сигнал на увеличение частоты вращения привода 3 насоса 2. Тиристор- ньй преобразователь 18 увеличивает частоту вращения привода 3 насоса 2. При этом вычислительное устройство б по сигналу датчика 11 уровня осуществляет стабилизацию уровня пульпы в зумпфе 1 на значении, соответствующем достигнутому ранее максимальному КПД насоса 2. При этом рабочая характеристика насоса 2: Q - Н переместится вправо (см. фиг.З) и ра-- бочая точка займет положение 4 на рабочей характеристике Q - Н, а коэффициент полезного действия останется неизменным ,и максимальным.
0
5
0
50
Формула изобретения
Способ автоматического управления процессом разделения в гидроциклоне, включающий измерение расхода воды в зумпф и уровня пульпы в зумпфе, давления пульпы на входе в гидроциклон, мощности, потребляемой двигателем наcoca, расхода пульпы гидроциклон, частоты вращения привода насоса, изменение частоты вращения привода насоса в зависимости от плотности твер- дого в питании гидроцикпона, определение знаков текущих приращений напора перед гидроциклоном и КПД насоса, изменение КПД насоса, изменение расхода воды в зумпф гидроцикло- на осуществляют в направлении, определяемом знаками приращений напора и КПД до достижения величиной КПД максимально возможного для данного режима значения, отлича- ю щ и и с я тем, что, с целью снижения удельного расхода злектро- энергии на перекачку пульпы путем повьшения КПД насоса при заданном качестве разделения пульпы, после прекращения изменения расхода воды
в зумпф гидроциклона при стабилизированном уровне пульпы в зумпфе изменяют сечение песковой насадки гидроциклона и дополнительно КПД насосной установки, при этом изменения сечения насадки гидроциклона осуществляют до достижения величиной КПД насоса максимально возможного для данного режима значения, причем при одинаковых знаках приращений напора и КПД насоса сечение песковой насадки гидроциклона уменьшают, а при противоположных знаках текущих приращений - увеличивают и после достижения величиной КПД максимально возможного для данного режима значения изменение сечения песковой насадки прекращают, после чего изменяют частоту вращения привода насоса при стабилизации уровня пульпы в зумпфе.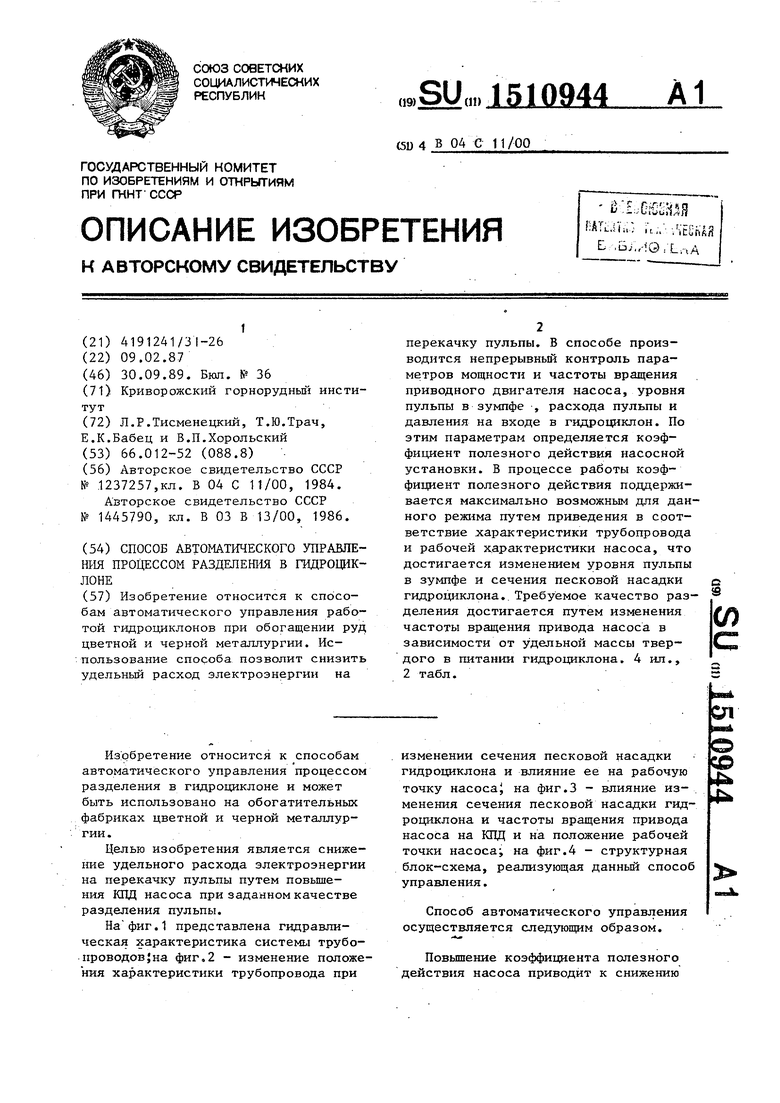
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом разделения в обогатительном аппарате | 1986 |
|
SU1445790A1 |
| Способ автоматического управления процессом разделения в гидроциклоне | 1989 |
|
SU1641430A1 |
| ГИДРОЦИКЛОННАЯ УСТАНОВКА С РЕГУЛИРУЕМЫМИ КОНСТРУКТИВНЫМИ ПАРАМЕТРАМИ | 2012 |
|
RU2538733C2 |
| НАСОС-ГИДРОЦИКЛОННАЯ УСТАНОВКА СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2465058C1 |
| НАСОС-ГИДРОЦИКЛОННАЯ УСТАНОВКА СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2465059C1 |
| НАСОС-ГИДРОЦИКЛОННАЯ УСТАНОВКА СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2465057C1 |
| ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2465056C1 |
| ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2464330C1 |
| Способ автоматического управленияпРОцЕССОМ РАздЕлЕНия B гидРОциКлОНЕ | 1979 |
|
SU839566A1 |
| Способ определения расхода пульпы в питании гидроциклона | 1986 |
|
SU1456239A1 |
Изобретение относится к способам автоматического управления работой гидроциклонов при обогащении руд цветной и черной металлургии. Использование способа позволит снизить удельный расход электроэнергии на перекачку пульпы. В способе производится непрерывный контроль параметров мощности и частоты вращения приводного двигателя насоса, уровня пульпы в зумпфер, расхода пульпы и давления на входе в гидроциклон. По этим параметрам определяется коэффициент полезного действия насосной установки. В процессе работы коэффициент полезного действия поддерживается максимально возможным для данного режима путем приведения в соответствие характеристики трубопровода и рабочей характеристики насоса, что достигается изменением уровня пульпы в зумпфе и сечения песковой насадки гидроциклона. Требуемое качество разделения достигается путем изменения частоты вращения привода насоса в зависимости от удельной массы твердого в питании гидроциклона. 4 ил., 2 табл.
н
u-i.i
Пульпа
Фиг.
Составитель Э.Склярский Редактор М, Бандура Техред и. ВересКорректор М.Максимишинец
Заказ 5836/11
Тираж 494
ВНИИПИ, Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Фаг.З
Подписное
| Способ управления работой гидроциклона | 1984 |
|
SU1237257A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ автоматического управления процессом разделения в обогатительном аппарате | 1986 |
|
SU1445790A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
