NU сд
;О
где S удельный вес твердого в пульпе, т/м ; К- константа;
W - мощность двигателя насоса, кВт; Р- давление пульпы на входе гидроциклона, кг/см ;
Я- напор, paзвивateмый насосом, м; rf- ускорение свободного падения, м/с-/ CD- расход воды в зумпф гидроциклона, м.
,.. „-,...... г -гПо сигналам датчиков 6, 8, 9, 10 и 11
положения характеристики трубопровода рассчитывается коэффициент полезного при изменении уровня пульпы в зумпфе гид- действия насосной установки по формуле
Изобретение относится к горной промышленности, а именно к области автоматического управления разделения в обогатительном аппарате, и может быть использовано на обогатительных фабриках при обогащении руд цветной и черной металлургии.
Целью изобретения является повыщение точности управления.
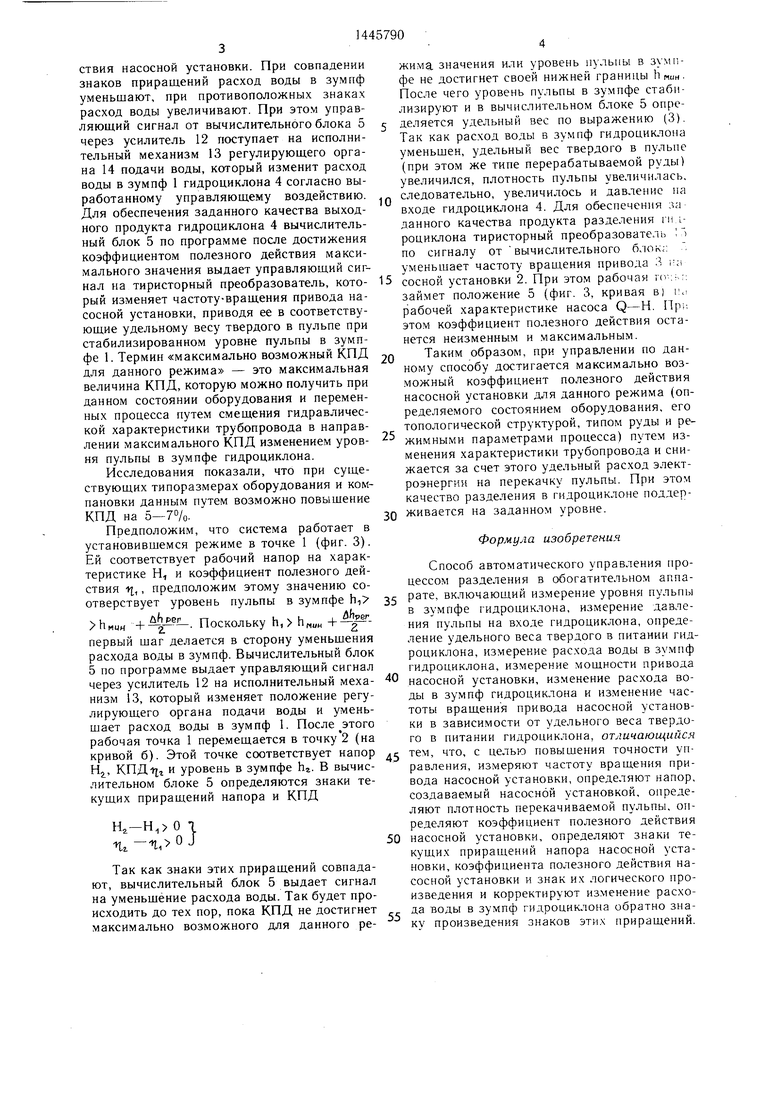
На фиг. I изображена блок-схема, реализующая данный способ; на фиг. 2 - графики
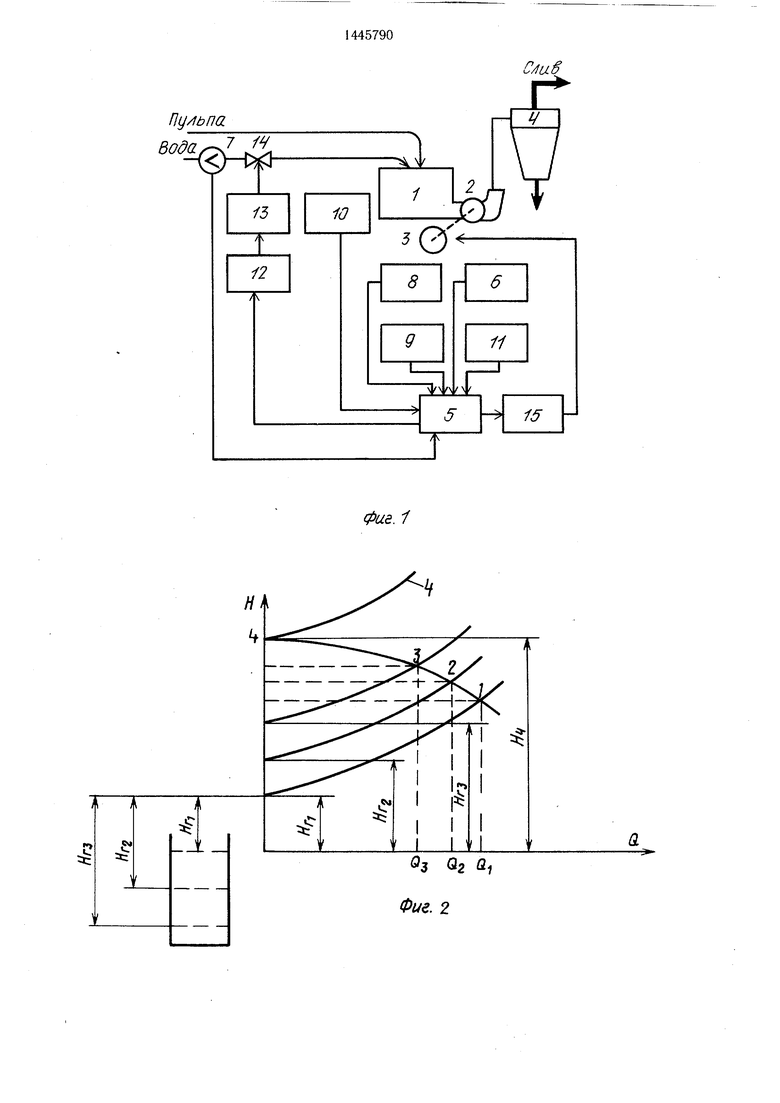
роциклона и влияния его на рабочую точку насосной установки; на фиг. 3 - перемещения рабочей точки установки при регулировании уровня пульпы в зумпфе и частота )5 вращения привода насосной установки.
Способ осуществляется следующим образом.
Пульпа из зумпфа 1 откачивается насосной установкой 2 с регулируемым приводом 3 в гидроциклон 4. В вычислитель- 20 ный блок 5 подаются сигналы от датчика 6 давления пульпы, установленного на входе гидроциклона 4 датчика 7 расхода воды в зумпф 1 гидроциклона 4, датчика
.о5я,:
N.
. 000/0 -3---100%
МзWj
(4)
где у - плотность перекачиваемой пульпы,
Q - расход жидкости, подаваемой насосной установкой, т/ч; Н - избыточный напор, м; полезная мощность насосной установки, кВт;
0- затраченная мощность насосной установки, кВт.
По программе в вычислительном блоке 5 определяется направление первого щага из-
8 мощности привода насосной установки, 25 менения расхода воды в зумпф 1 гидроцикдатчика 9 частоты вращения привода насос- но-й установки, датчика 10 уровня пульпы в зумпфе гидроциклона и датчика 11 расхода пульпы в зумпф 1 гидроциклона. В вычислительном блоке 5 по сигналам дятчиков 10,
лона 4 исходя из того, что для выбранных управляющих воздействий ограничением является допустимый верхний уровень пульпы в зумпфе Ьмагс, определяемый высотой зумпфа. Нижним ограничением по уровню
лона 4 исходя из того, что для выбранных управляющих воздействий ограничением является допустимый верхний уровень пульпы в зумпфе Ьмагс, определяемый высотой зумпфа. Нижним ограничением по уровню
сосной установкой по выражению H (A-+Bhi-CQt)(-)2; Hi (12,21--b5,828h.t-0,42Q4) () /i)
где A, В, С - коэффициенты пропорциональ11, 9 определяется напор, создаваемый на-30 „ульпы в зумпфе является условие неразрывности потоков при изменении частоты вращения двигателя. В результате исследований для условий ЮГОКа установлено, что данное условие надежно выполняется при уровне пульпы в зумпфе не менее 1/3
ности, определяемые в про- з высоты. Таким образом, уровень пуль- цессе наладки системы уп- ы в зумпфе может быть в пределах от Н„и„ равления;до Ь„„„-Ь Л hper Ьмахс и количество п - номинальная частота враще- pgg регулирования уровня пульпы в зумпфе ния привода насоса, 1/с; - до hwaxc опеределяется как п
О - расход насосной установки, 40 ,,C-}IK«, AWer м /ч;
35
-f-g где дЬ- величина одного щага регулирования. При выборе направления первого щага изменения расхода воды в зумф определяется текущий уровень пульпы в зумпфе hi и сравнивается
, - частота вращения привода насоса 1/с;
уровень пульпы в зумпфе, м. Плотность перекачиваемой пульпы опре- деляется по сигналам датчиков б, 10, 9 и 11 по формуле
у -
H-i
(2)
h. S h-1- Jlger
Hg-
(5)
то с целью предотвращения аварийной си- где Р- давление пульпы на входе в гидро- JQ туации первый щаг изменения расхода воды
в зумпф делается в сторону уменьшения, если же
циклон;
Н - напор насосной установки;
-- ускорение свободного падения.
lo сигналам датчиков 6-8 рассчитывается удельный вес твердого в пульпе по формуле55
, , KNCP-HQ)
(3)
.о5я,:
N.
. 000/0 -3---100%
МзWj
(4)
где у - плотность перекачиваемой пульпы,
Q - расход жидкости, подаваемой насосной установкой, т/ч; Н - избыточный напор, м; полезная мощность насосной установки, кВт;
0- затраченная мощность насосной установки, кВт.
По программе в вычислительном блоке 5 определяется направление первого щага из-
менения расхода воды в зумпф 1 гидроциклона 4 исходя из того, что для выбранных управляющих воздействий ограничением является допустимый верхний уровень пульпы в зумпфе Ьмагс, определяемый высотой зумпфа. Нижним ограничением по уровню
„ульпы в зумпфе является условие неразрывности потоков при изменении частоты вращения двигателя. В результате исследований для условий ЮГОКа установлено, что данное условие надежно выполняется при уровне пульпы в зумпфе не менее 1/3
,,C-}IK«, AWer
-f-g где дЬ- величина одного щага регулирования. При выборе направления первого щага изменения расхода воды в зумф определяется текущий уровень пульпы в зумпфе hi и сравнивается
с величиной Ь„ин ™h. S h-1- Jlger
Hg-
(5)
то с целью предотвращения аварийной си- туации первый щаг изменения расхода воды
в зумпф делается в сторону уменьшения, если же
ht Ьмин-+
Ааеер 2
(6)
то в сторону увеличения расхода воды.
После изменения расхода воды в зумпф гидроциклона определяются знаки приращений напора и коэффициента полезного действия насосной установки. При совпадении знаков приращений расход воды в зумпф уменьшают, при противоположных знаках расход воды увеличивают. При этом управляющий сигнал от вычислительного блока 5 через усилитель 12 поступает на исполнительный механизм 13 регулирующего органа 14 подачи воды, который изменит расход воды в зумпф 1 гидроциклона 4 согласно выработанному управляющему воздействию. Для обеспечения заданного качества выходного продукта гидроциклона 4 вычислительный блок 5 по программе после достижения коэффициентом полезного действия максимального значения выдает управляющий сиг10
жима значения или уровень пульпы в зум фе не достигнет своей нижней границы Ь па После чего уровень пульпы в зумпфе стаб лизируют и в вычислительном блоке 5 опр деляется удельный вес по выражению (3 Так как расход воды в зумпф гидроцикло уменьшен, удельный вес твердого в пуль (при этом же типе перерабатываемой руды увеличился, плотность пульпы увеличилас следовательно, увеличилось и давление входе гидроциклона 4. Для обеспечения з данного качества продукта разделения I n роциклона тиристорный преобразователь по сигналу от вычислительного блок;: уменьшает частоту вращения привода
нал на тиристорный преобразователь, кото- 15 сосной установки 2. При этом рабочая го ;
+ Поскольку h, Ь„„„
рыи изменяет частоту-вращения привода насосной установки, приводя ее в соответствующие удельному весу твердого в пульпе при стабилизированном уровне пульпы в зумпфе 1. Термин «максимально возможный КПД для данного режима - это максимальная величина КПД, которую можно получить при данном состоянии оборудования и переменных процесса путем смещения гидравлической характеристики трубопровода в направлении максимального КПД изменением уровня пульпы в зумпфе гидроциклона.
Исследования показали, что при существующих типоразмерах оборудования и компановки данным путем возможно повышение КПД на 5-7%.
Предположим, что система работает в установившемся режиме в точке 1 (фиг. 3). Ей соответствует рабочий напор на характеристике Н., и коэффициент полезного действия 1,, предположим этому значению со- отверствует уровень пульпы в зумпфе hi
Ьмчн
первый шаг делается в сторону уменьшения расхода воды в зумпф. Вычислительный блок 5 по программе выдает управляющий сигнал через усилитель 12 на исполнительный механизм 13, который изменяет положение регулирующего органа подачи воды и уменьшает расход воды в зумпф 1. После этого рабочая точка 1 перемещается в точку 2 (на кривой б). Этой точке соответствует напор Н, КПД-Цг и уровень в зумпфе Ьг. В вычислительном блоке 5 определяются знаки текущих приращений напора и КПД
, О Т.
Так как знаки этих приращений совпадают, вычислительный блок 5 выдает сигнал на уменьшение расхода воды. Так будет про50
Способ автоматического управления процессом разделения в обогатительном аппарате, включающий измерение уровня пульпы в зумпфе гидроциклона, измерение давления пульпы на входе гидроциклона, определение удельного веса твердого в питании гид роциклона, измерение расхода воды в зумпф гидроциклона, измерение мощности привода насосной установки, изменение расхода воды в зумпф гидроциклона и изменение частоты вращения привода насосной установки в зависимости от удельного веса твердого в питании гидроциклона, отличающийся тем, что, с целью повышения точности управления, измеряют частоту вращения привода насосной установки, определяют напор, создаваемый насосной установкой, определяют плотность перекачивае.мой пульпы, определяют коэффициент полезного действия насосной установки, определяют знаки текущих приращений напора насосной установки, коэффициента полезного действия насосной установки и знак их логического произведения и корректируют изменение расхоисходить до тех пор, пока КПД не достигнетда воды в зумпф гидроциклона обратно знаМЯКГИМ ЯЛКНП Rn Mn KPnrn ГТЛ« ПЯННПГП ПР-V T nnriUQRAnPm O -rl.iv n nu noilTOLJIjli
максимально возможного для данного ре
ку произведения знаков этих приращений.
0
жима значения или уровень пульпы в зумпфе не достигнет своей нижней границы Ь пан После чего уровень пульпы в зумпфе стабилизируют и в вычислительном блоке 5 определяется удельный вес по выражению (3). Так как расход воды в зумпф гидроциклона уменьшен, удельный вес твердого в пульпе (при этом же типе перерабатываемой руды) увеличился, плотность пульпы увеличилась, следовательно, увеличилось и давление на входе гидроциклона 4. Для обеспечения за данного качества продукта разделения I nд- роциклона тиристорный преобразователь ) по сигналу от вычислительного блок;: уменьшает частоту вращения привода
5 сосной установки 2. При этом рабочая го ;
займет положение 5 (фиг. 3, кривая в) рабочей характеристике насоса Q-Н. Пр;-, этом коэффициент полезного действия останется неизменным и максимальным.
Таким образом, при управлении по данному способу достигается максимально возможный коэффициент полезного действия насосной установки для данного режима (определяемого состоянием оборудования, его топологической структурой, типом руды и ре- жимными параметрами процесса) путем изменения характеристики трубопровода и снижается за счет этого удельный расход электроэнергии на перекачку пульпы. При этом качество разделения в гидроциклоне поддерживается на заданном уровне.
г
5
0
0
Формула изобретения
Способ автоматического управления процессом разделения в обогатительном аппарате, включающий измерение уровня пульпы в зумпфе гидроциклона, измерение давления пульпы на входе гидроциклона, определение удельного веса твердого в питании гидроциклона, измерение расхода воды в зумпф гидроциклона, измерение мощности привода насосной установки, изменение расхода воды в зумпф гидроциклона и изменение частоты вращения привода насосной установки в зависимости от удельного веса твердого в питании гидроциклона, отличающийся тем, что, с целью повышения точности управления, измеряют частоту вращения привода насосной установки, определяют напор, создаваемый насосной установкой, определяют плотность перекачивае.мой пульпы, определяют коэффициент полезного действия насосной установки, определяют знаки текущих приращений напора насосной установки, коэффициента полезного действия насосной установки и знак их логического произведения и корректируют изменение расхода воды в зумпф гидроциклона обратно знаV T nnriUQRAnPm O -rl.iv n nu noilTOLJIjli
ку произведения знаков этих приращений.
Пу/1ьпа
°
С/1ав
v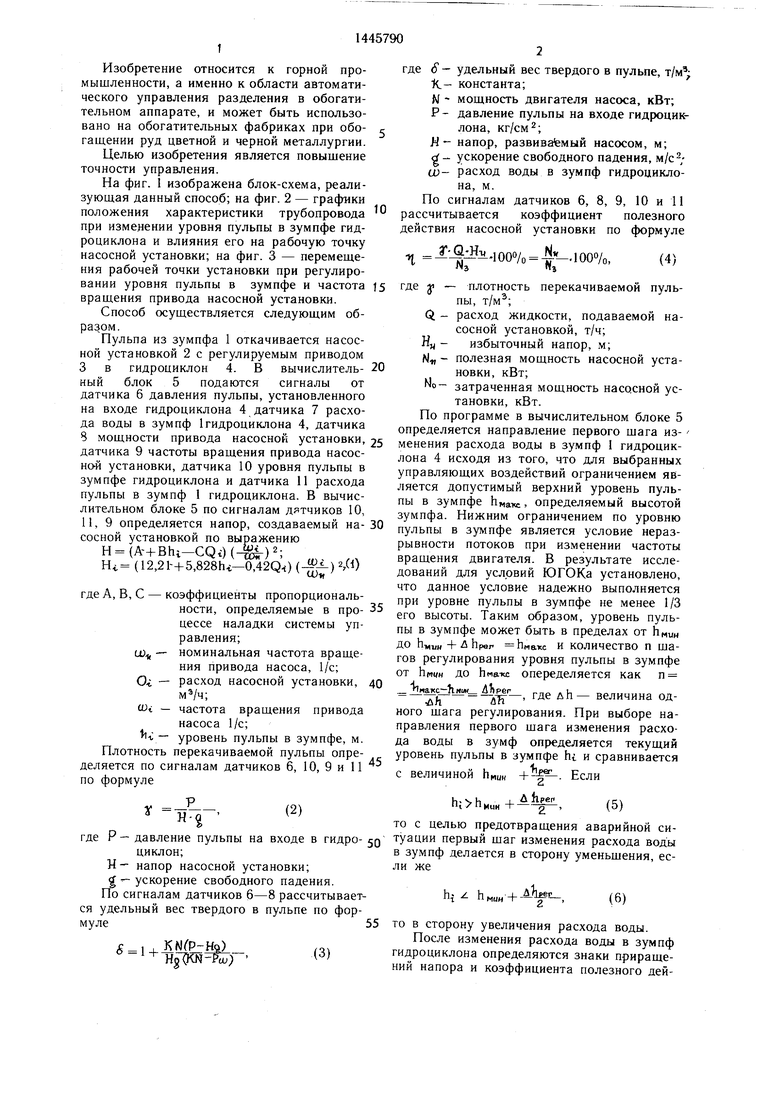
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом разделения в гидроциклоне | 1987 |
|
SU1510944A1 |
| Способ автоматического управления процессом разделения в гидроциклоне | 1989 |
|
SU1641430A1 |
| Способ управления работой гидроциклона | 1984 |
|
SU1237257A1 |
| Способ определения расхода пульпы в питании гидроциклона | 1986 |
|
SU1456239A1 |
| Способ автоматического управленияпРОцЕССОМ РАздЕлЕНия B гидРОциКлОНЕ | 1979 |
|
SU839566A1 |
| Способ управления многостадийным процессом обогащения железных руд | 1981 |
|
SU1015910A1 |
| Система автоматического управления процессом обогащения железных руд | 1982 |
|
SU1074598A1 |
| Система автоматического управления циклом измельчения | 1982 |
|
SU1098570A1 |
| Способ автоматического управления процессом разделения | 1978 |
|
SU768477A1 |
| Устройство автоматического управления гидроциклоном | 1980 |
|
SU927321A1 |
Изобретение относится к горной пром-, сти и м.б. использовано для обогащения руд цветной и черной металлургии. Цель - повышение точности управления. Измеряют уровень пульпы в зумпфе гидроциклона. На входе последнего определяют давление пульпы. В питании гидроциклона определяют удельный вес твердого. Измеряют расход воды в зумпф гидроциклона. Определяют мощность привода насосной установки. Измеряют частоту вращения привода установки. Определяют напор, создаваемый установкой, и плотность прокачиваемой пульпы. Определяют коэффициент полезного действия установки и знаки текущих приращений напора ее. Коэффициент полезного действия установки и знак их логического произведения корректируют изменение расхода воды в зумпф гидроциклона обратно знаку произведения этих приращений. Т. о. при использовании данного способа достигается максимально возможный коэффициент полезного действия. 3, ил. .( (Л
1
г
фае. 1
Фиг.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РАБОТЫ | 0 |
|
SU194665A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления работой гидроциклона | 1984 |
|
SU1237257A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
