сд
00 Is9
Изобретение относится к электротехнике, в частности к индукционным датчикам угла типа вращающийся трансформатор.
Целью изобретения является повышение точности путем увеличения выходного сигнала.
На чертеже приведена принципиальная электрическая схема бесконтактного вращающегося трансформатора,
В Kopnjnce статора установлены два пакета I и 2 статора с обмотками возбуждения 3, квадратурной,4, синусной 5 и косинусной 6 соответственно.
На роторе установлены два пакета 7 и 8 с обмотками 9,х10 и 11,12 соответственно. Обмотки двух пакетов 7 и 8 ротора попарно соединены между собой обмотка 9 - с обмоткой 12,10 - с 11. Пакеты 1 и 7 статора и ротора с обмотками составляют первый, а пакеты 2 и 8 статора и ротора с обмотками - второй вращающиеся трансформаторы в каскаде с числом пар полюсов тип соответственно.
Последовательно с парой обмоток 10 и 11 включен конденсатор 13, а с парой обмоток 9 и 12 - конденсатор 14. Емкость этих конденсаторов
г 1
2t( f-X.s;
где f - частота напряжения питания;
LSi
X, ,j индзпстивное сопротивление
рассеяния пары обмоток рото- /ра 10, 11 и 9,12 соответственно.
При подаче напряжения на обмотку 3 возбуждения на синусной 5 и косинусной 6 обмотках бесконтактного вращающегося трансформатора трансформируются соответствующие напряжения:
и K/Kj.sin(m inVj
(О Ufe - К , K,,cos(m ±п)о( ,
где К, - коэффициент трансформации
первого вращающегося трансформатора в каскаде с учетом его нагрузки на второй вращающийся трансформатор влкаскаде;
К. - коэффициент трансформации , второго вращающегося трансформатора в каскаде; d - угол поворота ротора.
1
В выражении для выходных напряжений бесконтактного вращающегося трансформатора указан знак плюс или
минус в зависимости от полярности соединенных обмоток ротора.
Как видно из выражения (1), в бес Контактном вращающемся трансформаторе каскадного типа общий коэффициент
трансформации равен произведению
коэффициентов трансформации отдельных вращающихся трансформаторов в каскаде и поэтому у многополюсных бесконтактг: ных вращающихся трансформаторов представляет собой малую величину, вследствие чего в устройствах автоматики требзтотся дополнительные усилители сигналов. Применение усилителей не только усложняет устройства автоматики, но и снижает тих точность.
Коэффициент-трансформации каждого вращающегося трансформатора в каскаде понижен за счет падения, напряжения на активных сопротивлениях, а
также на индуктивных сопротивлениях рассеяния его обмоток. Индуктивные сопротивления рассеяния особенно велики у многополюсных вращающихся трансформаторов,
При подк;шчении последовательно с каждой парой соединенных обмоток ротора конденсаторов С1 и С а их емкостные сопротивления Х,и Х равны соответствующим индуктивным сопротивлениям рассеяния пар соединенных роторных обмоток:
у у LSI U51
+ X
LSI
40 И (
L,S2
Чм-х
LSI
где ..
индуктивные сопротивления рассеяния
обмоток ротора 10,
11, 9 и 12 соответственно.
Таким образом, падения напряжения на емкостных сопротивлениях Xj. и С1 соответствующих индуктивных сопротивлениях Хц и X ц компенсируются, и, следовательно, повьшается коэффициент трансформации вращающегося трансформатора, а значит, и вели- чина выходного напряжения.
Так как у многополюсных вращающих- ся трансформаторов значения индуктивных сопротивлений рассеяния существенны, то при компенсации индуктивных
сопротивлений рассеяния обмоток ротора емкостными сопротивлениями коэффициент трансформации вращающегося трансформатора повьшается значительно.
С увеличением коэффициента редукции положительный эффект увеличивается.
Кроме того, у реальных электричес ких машин равенство (1) нарушается из-за разности сопротивлений между соединенными парами обмоток ротора, что приводит к увеличению функциональных погрешностей вращающегося трансформатора. У многополюсных вращающихся трансформаторов практически вся разность этих сопротивлений обусловлена разностью индуктивных сопротивлений рассеяния соединенных пар роторных обмоток. Таким образом, при компенсации индуктивных сопротивлений рассеяния соединенных пар ро- торных обмоток емкостным сопротивлением, разность сопротивоений этих обмоток равна нулю. При этом функциональная погрешность вращающегося трансформатора обусловленная этим
фактором, равна нулю, и точность его повышается.
Формула изобретения
Бесконтактный вращающийся трансформатор, содержащий два пакета статора с обмотками и два пакета ротора с обмотками, обмотки разных пакетов ротора попарно соединены между собой последовательно, а последовательно с каждой парой обмоток включены элементы электрического сопротивления, о тличающий с я тем, что, с целью повьппения точности путём увелит чения выходного сигнала, элементы электрического сопротивления вьшолне- ны в виде конденсаторов, емкость кото
рых Cj
С,-
определяется выражением 1
H fx;;,.
частота напряжения питания; суммарное индуктивное сопротивление рассеяния; номер пары соединенных обмоток .ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный бесконтактный индукционный датчик угла | 1987 |
|
SU1566448A1 |
| Схема включения вращающегося трансформатора | 1980 |
|
SU951581A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
| Двухканальный индукционный датчик угла | 1985 |
|
SU1316068A1 |
| БЕСКОНТАКТНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 1972 |
|
SU356738A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU871285A1 |
| Двухканальный вращающийся трансформатор | 1990 |
|
SU1778879A1 |
| Способ определения ухода нулевого положения вращающегося трансформатора | 1979 |
|
SU868940A1 |
| Электромашинный кольцевой датчик угла | 1989 |
|
SU1742948A1 |
| Преобразователь угол-фаза | 1977 |
|
SU734506A1 |
Изобретение относится к электротехнике, в частности, к индукционным датчикам угла типа "вращающийся трансформатор" (ВТ). Целью изобретения является повышение точности путем увеличения выходного сигнала. ВТ содержит установленные в корпусе по два пакета статора и ротора с обмотками. Обмотки 9, 10 первого пакета ротора попарно соединены с обмотками 11, 12 второго пакета ротора. Последовательно с каждой парой соединенных обмоток ротора включены элементы электрического сопротивления 13, 14. В качестве элементов электрического сопротивления применены конденсаторы, емкость которых удовлетворяет условию CI=1/(2φFХ*98лSI), где F - частота напряжения питания
X*98лSI суммарное индуктивное сопротивление рассеяния соответствующей пары соединенных обмоток ротора
I = 1,2 -номер пары соединенных обмоток ротора. 1 ил.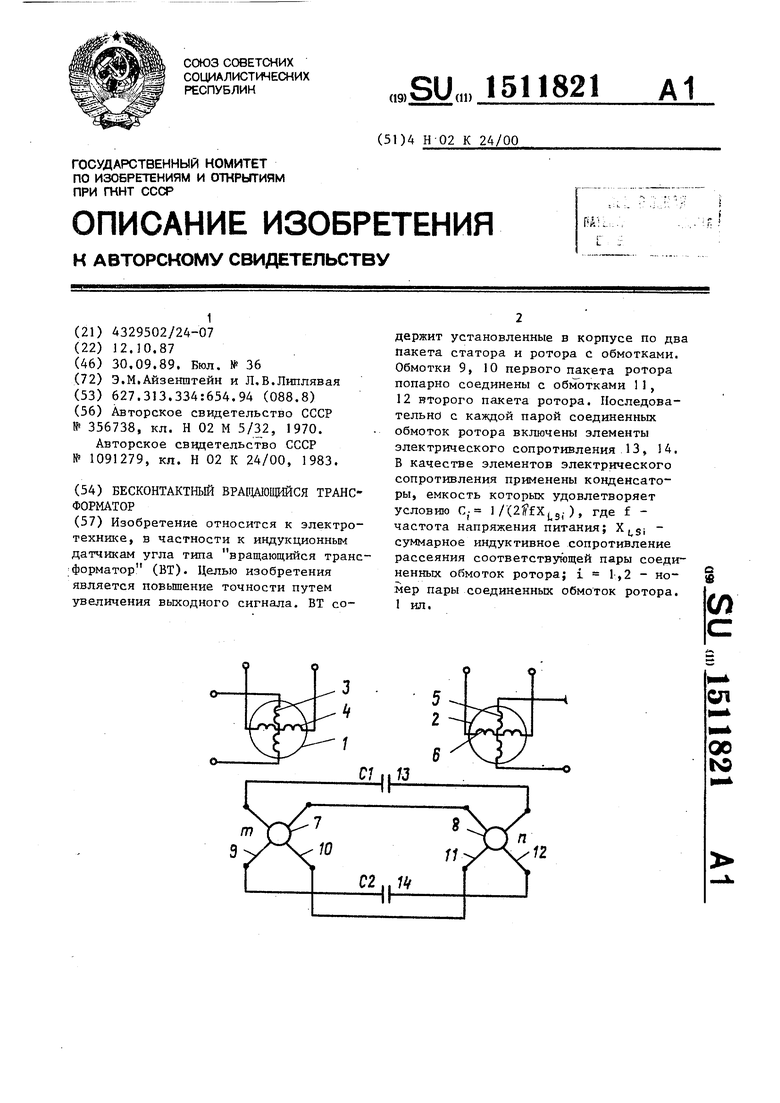
| БЕСКОНТАКТНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 0 |
|
SU356738A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный синусно-косинусный вращающийся трансформатор | 1983 |
|
SU1091279A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
