|
(3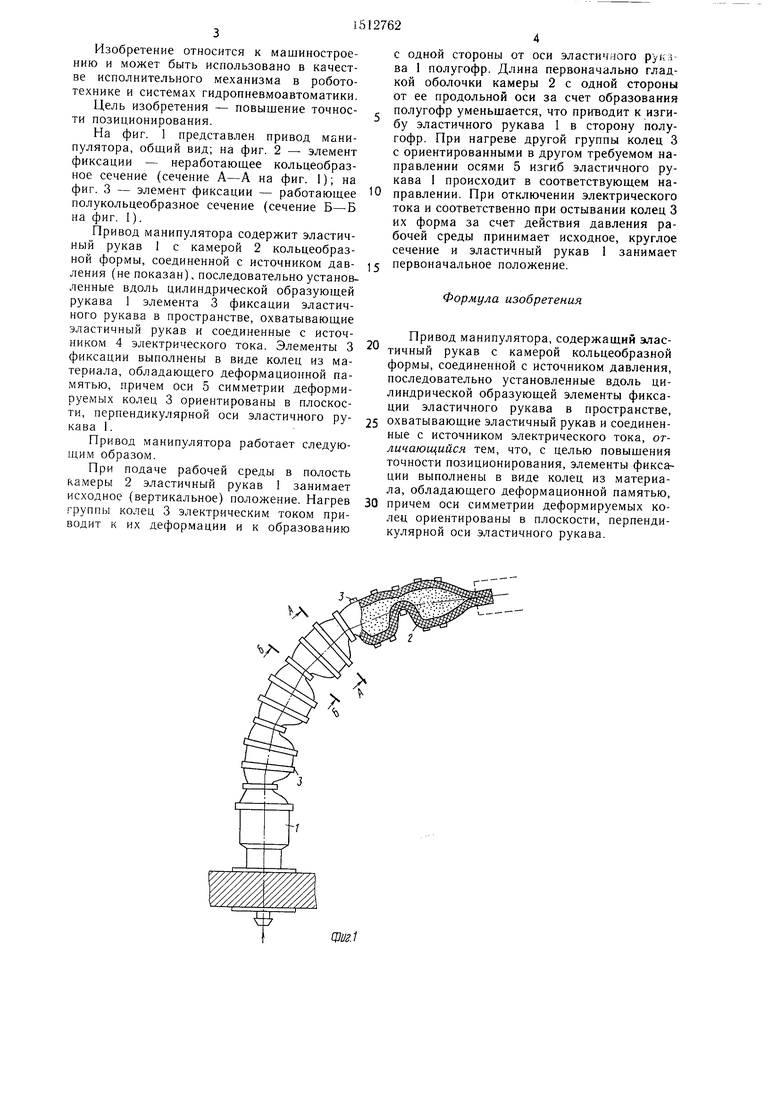
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| ГИБКИЙ КОМПЕНСАТОР | 2001 |
|
RU2180069C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОЛЬЦЕОБРАЗНОЙ РАМЫ | 2016 |
|
RU2720875C2 |
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
| Насос перистальтического типа | 1986 |
|
SU1408102A1 |
| ОРТОДОНТИЧЕСКИЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ФУНКЦИОНАЛЬНЫЙ АКТИВАТОР А.Е.СТЕПАНОВА | 1995 |
|
RU2115384C1 |
| УСТРОЙСТВО ДЛЯ ГЕРМЕТИЗАЦИИ УЗЛОВ СКВАЖИННЫХ ПРИБОРОВ | 2000 |
|
RU2180939C1 |
| КЛАПАН ЗАПОРНЫЙ ПНЕВМАТИЧЕСКИЙ ДЛЯ ГЕРМЕТИЗАЦИИ ДРЕНАЖНЫХ СИСТЕМ И УДЕРЖАНИЯ РАЗЛИВА ХИМИЧЕСКИХ ВЕЩЕСТВ | 2019 |
|
RU2724286C1 |
| Устройство для определения деформационных и прочностных свойств скальных массивов | 1990 |
|
SU1798432A1 |
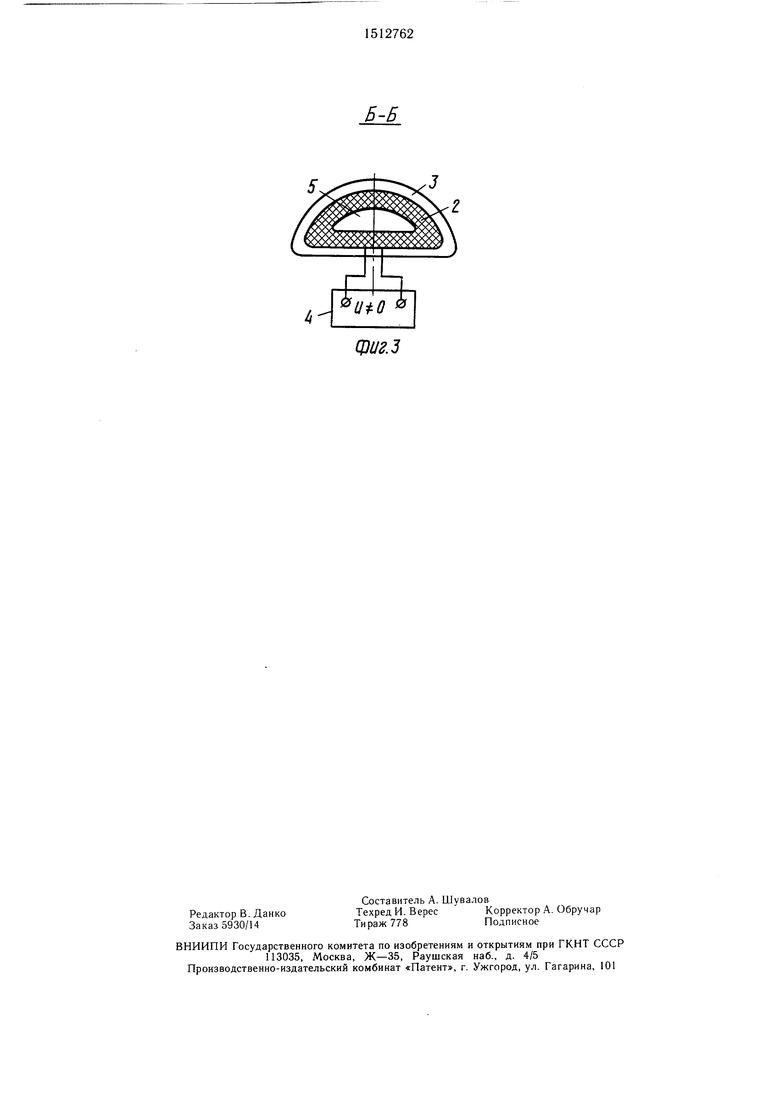
Изобретение может быть использовано в качестве исполнительного механизма в робототехнике и системах гидропневмоавтоматики. Цель изобретения - повышение точности позиционирования. Для этого в приводе манипулятора, содержащем эластичный рукав (ЭР) с камерой 2 кольцеобразной формы, соединенной с источником давления, элементы фиксации (ЭФ) 3 ЭР в пространстве, охватывающие последний и соединенные с источником электрического тока 4, выполнены в виде колец из материала, обладающего деформационной памятью. Причем оси симметрии 5 ЭФ 3 ориентированы в плоскости, перпендикулярной оси ЭР. 3 ил.
фиг. 2
Изобретение относится к машиностроению и может быть использовано в качестве исполнительного механизма в робототехнике и системах гидропневмоавтоматики.
Цель изобретения - повышение точности позиционирования.
На фиг. 1 представлен привод манипулятора, общий вид; на фиг. 2 - элемент фиксации - неработающее кольцеобразное сечение (сечение А-А на фиг. 1); на
с одной стороны от оси эластичного рука ва 1 полугофр. Длина первоначально гладкой оболочки камеры 2 с одной стороны от ее продольной оси за счет образования полугофр уменьшается, что приводит к изгибу эластичного рукава 1 в сторону полугофр. При нагреве другой группы колец 3 с ориентированными в другом требуемом направлении осями 5 изгиб эластичного рукава I происходит в соответствующем нафиг. 3 - элемент фиксации - работающее О правлении. При отключении электрического полукольцеобразное сечение (сечение Б-Б тока и соответственно при остывании колец 3
их форма за счет действия давления рабочей среды принимает исходное, круглое
сечение и эластичный рукав 1 занимает
Формула изобретения
на фиг. 1
Привод манипулятора содержит эластичный рукав 1 с камерой 2 кольцеобразной формы, соединенной с источником дав- 5 первоначальное положение, ления (не показан), последовательно установленные вдоль цилиндрической образующей рукава 1 элемента 3 фиксации эластичного рукава в пространстве, охватывающие
эластичный рукав и соединенные с источ-Привод манипулятора, содержащий эласником 4 электрического тока. Элементы 3 20 ичный рукав с камерой кольцеобразной фиксации выполнены в виде колец из ма-формы, соединенной с источником давления,
териала, обладающего деформационной памятью, причем оси 5 симметрии деформируемых колец 3 ориентированы в плоскоспоследовательно установленные вдоль цилиндрической образующей элементы фиксации эластичного рукава в пространстве, ти, перпендикулярной оси эластичного ру- 25 охватывающие эластичный рукав и соединен- 1.(lyg (. источником электрического тока, огПривод манипулятора работает следую-личающийся тем, что, с целью повышения
щим образом.точности позиционирования, элементы фиксаПри подаче рабочей среды в полостьции выполнены в виде колец из материааамеры 2 эластичный рукав 1 занимаетла, обладающего деформационной памятью,
исходное (вертикальное) положение. Нагрев 30 причем оси симметрии деформируемых ко- . фуппы колец 3 электрическим током при-лец ориентированы в плоскости, перпендиводит к их деформации и к образованиюкулярной оси эластичного рукава.
ЬЛ
Л
WlJZ.I
с одной стороны от оси эластичного рука ва 1 полугофр. Длина первоначально гладкой оболочки камеры 2 с одной стороны от ее продольной оси за счет образования полугофр уменьшается, что приводит к изгибу эластичного рукава 1 в сторону полугофр. При нагреве другой группы колец 3 с ориентированными в другом требуемом направлении осями 5 изгиб эластичного рукава I происходит в соответствующем на правлении. При отключении электрического тока и соответственно при остывании колец 3
их форма за счет действия давления рабочей среды принимает исходное, круглое
сечение и эластичный рукав 1 занимает
первоначальное положение,
Формула изобретения
чальное положение,
фиг.З
| Привод схватка манипулятора | 1977 |
|
SU617254A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
