1
Изобретение относится к машиностроению, а именно к манипуляторам, применяемым в различных производственных процессах.
Известен исполнительньй орган манипулятора, состоящийиз расположенных в оболочке звеньев, имеющих отверстия, вьтолненные в центральной части и по периферии,при этом в последних размещены управлякяцие канаты, соединенные с одной стороны с последним звеном, а с другой - с приводом управления ij
Однако данное устройство имеет невысокую надежность и ограниченные технологические возможности.
Цель изобретения - повышение надежности и расширение технологических возможностей.
Указанная цель достигается тем, что исполнительный орган манипулятора, состоящий из расположенных в оболочке звеньев, имеющих отверстия выполненные в центральной части и по периферии, при этом в последних размещены управляющие канаты, соединенные с одной стороны с последним звеном, а с другой - с .приводом управления, снабжен источником рабочей среды и запорными пружинными кольцами, причем на звеньях по внешнему периметру выполнены проточки под эти кольца, а оболочка выполнен из эластичного упругого материала и закреплена на звеньях посредством пружинных колец, при этом внутренняя полость оболочки соединена с источником рабочей среды.
Звенья выполнены в виде двояковыпуклых колец, имеющих шаровую впадину с одной стороны и шаровой выступ с другой.
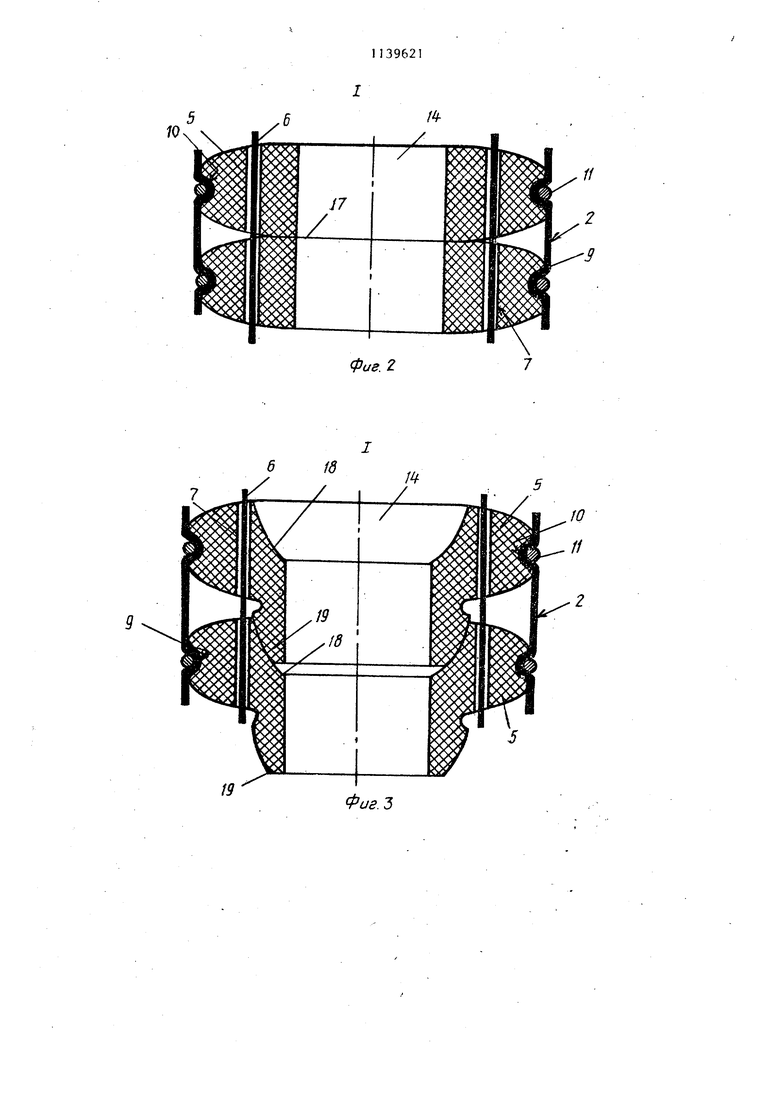
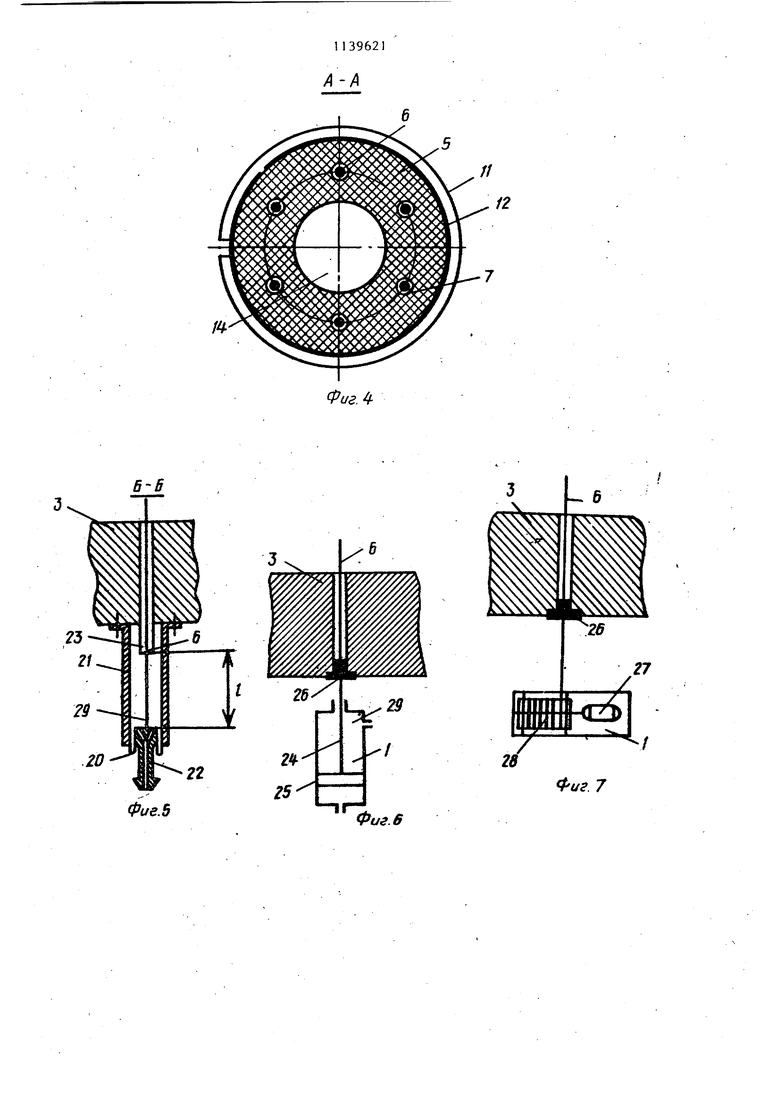
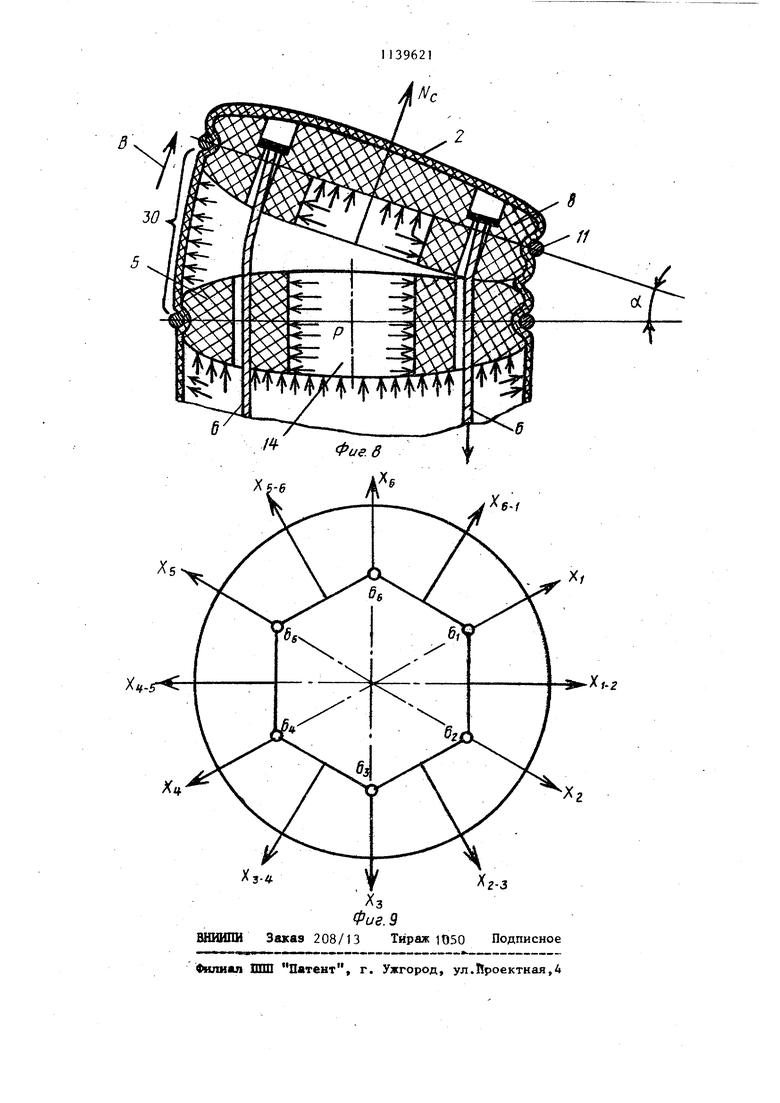
На фиг.1 схематически изображен исполнительный орган, общий нид-, на фиг.2 - узел 1 на фиг.1} на фиг.З - то же, вариант исполнения; на фиг.4 - разрез А-А на фиг.1, на фиг.З - разрез Б-Б на фиг.1; на фиг.6 - вариант исполнения привода каната в виде пневмодилиндра; на фиг.7 - то же, в виде лебедки; на фиг.8 - схема деформации эластичной оболочки; на фиг.9 - схема направления перемещений исполнительного органа манипулятора .Исполнительный орган манипулятора состоит из привода 1 управления, оболочки 2, основания 3, установлен212
ноге на станине 4, набооа звеньев 5 прошитых управляющими канатами 6.
Канаты 6 размещены в периферийных отверстиях 7 звеньев 5 и закреплены жестко с одной стороны с последним звеном 8, а с другой с подвижными органами соответствующих приводов 1 управления.
Оболочка 2 вьшолнена из эластичного упругого материала, например резины. Оболочка 2 охватывает звенья 5 по периметру и приклеивается к ним в местах 9 прилегания (фиг.2 и 3), а также к верхнему торцу звена 8. В звеньях 5 и в последнем звене 8 по внешнему периметру выполнены проточки 10, в которых размещены запорные пружинные кольца 11. Нижняя часть эластичной упругой оболочки одета на выступ 12 основания 3 и закреплена на нем хомутиком 13. В центральной части звеньев 5 выполнены отверстия, образующие полость 14, соединенную посредством отверстия 15
со штуцером 16 источника рабочей среды.
Звенья 5 выполнены в виде двояковыпуклых в осевом направлении колец с плоскими поясками 17 на торцах.
Кроме того, с целью повьш1ения
поперечной устойчивости и нагрузочной способности звенья могут быть выполнены в виде двояковыпуклых колец, име юп5их с одного торца кольца шаро вую расточку 18, ас другого - шаровой вьютуп 19, образующих при взаимном их соединении шаровую опору (фиг.З). Привод 1 управления может, быть любым.
Привод управления 1 (фиг.З) состоит из гибкого рукава 20, размещенного внутри гильзы 21. Последняя крепится к основанию 3 так, что одновременно закрепляет в верхней части
и рукав 20. В нижней части рукав 20 соединен со штуцером 22, выполняющим одновременно функцию подвижного поршня. Со штуцером 22 жестко соединен управляющий канат 6. Герметизация полости 14 осуществляется гибким уплотнительным рукавом 23, соединенным герметично снизу с управляющим канатом 6, а в верхней части - с основанием 3.
Б варианте исполнения привода 1 на фиг.6 управляющий канат 6 соединен со штоком 24 пневмоцилиндра, получающего движение от поршня 23. Герметизация полости 14 осуществляется уплотнением 26. В варианте исполнения привода 1 упраЕления,на фиг. 7 привод выполнен в виде электродвигателя 27 и барабана 28. Управляющий канат 6 наматывается на барабан 28. Герметизация полости 14 также осуществляется уплотнением 26. Полости 29 в управлянщих приводах связаны с источником рабочей ср ды. Приводы могут быть вьтолнены в виде электромагнитов (на фиг.2 не п казано) . Исполнительный орган работает сл дующим образом, В исходном положении во все полости 29 управляющих приводов подается сжатьй воздух под небольшим давлением (в случае применения привода по варианту на фиг.7 на электр двигатели 27 подается небольшое на-пряжение). При этом все управляющие каналы 6 находятся под небольши усилием натяжения и исполнительный орган занимает (под действием этих усилий и воздействия эластичной упругой оболочки 2) исходное положени (фиг.1). Жесткость исполнительного органа (как конструкции в целом) в поперечном направлении обладает полной симметрией. При подаче сигнала управления на один из приводов 1 управления поперечная жесткость становится несимметричной, а именно в месте натяжения управляющего каната 6 жесткость существенно повышается в направлени от центра к эгому канату. Предположим, что сигнал управления подан в правый привод 1, изображенньв) на фиг.1 (подача сигнала управления оз начает, что в полость 29 подается в сокое давление, превышающее первоначальное. Дпя исполнения (фиг.7) на электропривод 27 подается высокое напряжение и управлякж ий канат будет при этом удерямваться с большим усилием. Тогда жесткость органа в целом повьшается в направлении от центра к этому канату. Затем осуществляется силовое воздействие путем подачи в полость 14 исполнительного органа через штуцер 16 дав ления от источника рабочей среды, например сжатого воздуха или жидкос ти. Давление рабочей среды воздей621 на внутренние поверхности исполнительного органа (фиг.8). При этом давление на звенья (например, кольца) 5 уравновешивается, так как оно находится под всесторонним давлением. Последнее звено 8 находится под давлением только снизу. Равнодействукмдая силового воздействия на последнее звено (например, кольцо) 8 равна NC - Р 5 , где Р - величина давления воздуха или жидкости, подаваемых в полость 14J S площадь поперечного сечения кольца 8. Давление передается также изнутри на эластичную упругую оболочку 2 в зоне 30 меяду соседними кольцами. Эластичная упругая оболочка будет испытывать радиальные деформации. А так как в радиальном направлении подвижность эластичной упругой оболочки ограничена запорными пружинными кольцами 11 и креплением ее в местах 9 прилегания к кольцам 5, то преобладающей деформацией будет осевая деформация в направлении стрелки В (фиг.8). Равнодейс- вующая сила Ng уравновешивается силой упругости оболочки Рцрр и силой управления NH . Таким образом, на кольцо 8 действует пара сил и М, которая, приводит к повороту кольца 8 на угол еС . Пара силНс-М|| уравновещиваетх;я силой упругости Р;)(,рИ опорной реакцией кольца 8 в месте его контакта с кольцом 5. Сила упругости пр возникает на всей длине оболочки в промежутках между кольцами 5. Такое взаимодействие колец при действии сжатого гвза или жидкости на внутреннюю полость 14 приводит к изгибу исполнительного органа на угол jb равный S. оС , где h - количество колец 5, и он занимает положение 11, показанное на фиг.1 тонкими линиями. Величина угла деформации oi , а следовательно и суммарного угла /3 зависит от величины давления Р в полости 14. При подаче сигнала в другой привод 1, например в левый привод, показанный на фиг.1, затормозится левьй управляющий канат 6 и изгиб исполнительного органа будет, происходить влево. Таким образом, направление изгиба исполнительного органа полностью определяется положением заторможенного каната. На фиг.9 показана схема расположения управляющих канатов 6 (индекс показывает порядковьй номер каната). Стрелками показано направление перемещения исполнительного органа при воздействии на соответствующий канат. Так, при воздействии н канат 6 перемещение происходит воздействии В направлении X. на канат 6 в направлении л,2 и т.д. При одновременном воздействии на два каната, например на канаты 6/1 и 6л , перемещения происходят в промежуточном направлении /i-g и т.д. При этом необходимо, чтобы давления, подаваемые одновременно в два привода управления на затормаживание канатов, были равными, например Р PgТаким образом, число возможных направлений перемещения равно удвоен ному числу канатов 6. Если давления, подаваемые одновременно на два привода управления, не равны, HainpHMep Р /Р2, то напра ление перемещения исполнительного ор гана будет отличным от показанных на фиг.9. Так, при подаче давления в привод канатов 6, и 6 (если PI Pj )исполнитёльный орган перемещается в направлении, промежуточном между направлениями X, и Х Если Р, Pj , то направление перемещения будет промежуточным между Х,. и 2 . Таким образом, направление перемещения практически может быть любым в объеме эллипсоида с больщой полуосью, равной высоте Н исполнительного органа и расположенной в направлении продольной оси недеформированного исполнительного юргана. Малая полуось эллипсоида равна удвоенному, поперечному размеру я /2 максимально деформированного органа (фиг.1). На последнем кольце 8 может быть расположен схват любой конструкции, который доставляется в рабочую точку путем деформации исполнительного органа в нужную сторону. После этого может быть включен схват. Управляющие и силовые коммуникации к схвату могут быть подведены через полость 14 или вне оболочки 2. Кроме того, сам . исполнительный орган может выполнять роль схвата и переносить груз после охвата его непосредственно оболочкой 2. . Предлагаемый исполнительный орган позволяет расишрить технологические возможности и повысить надежность за счет соединения полости с источником рабочей среды.
Фиг. f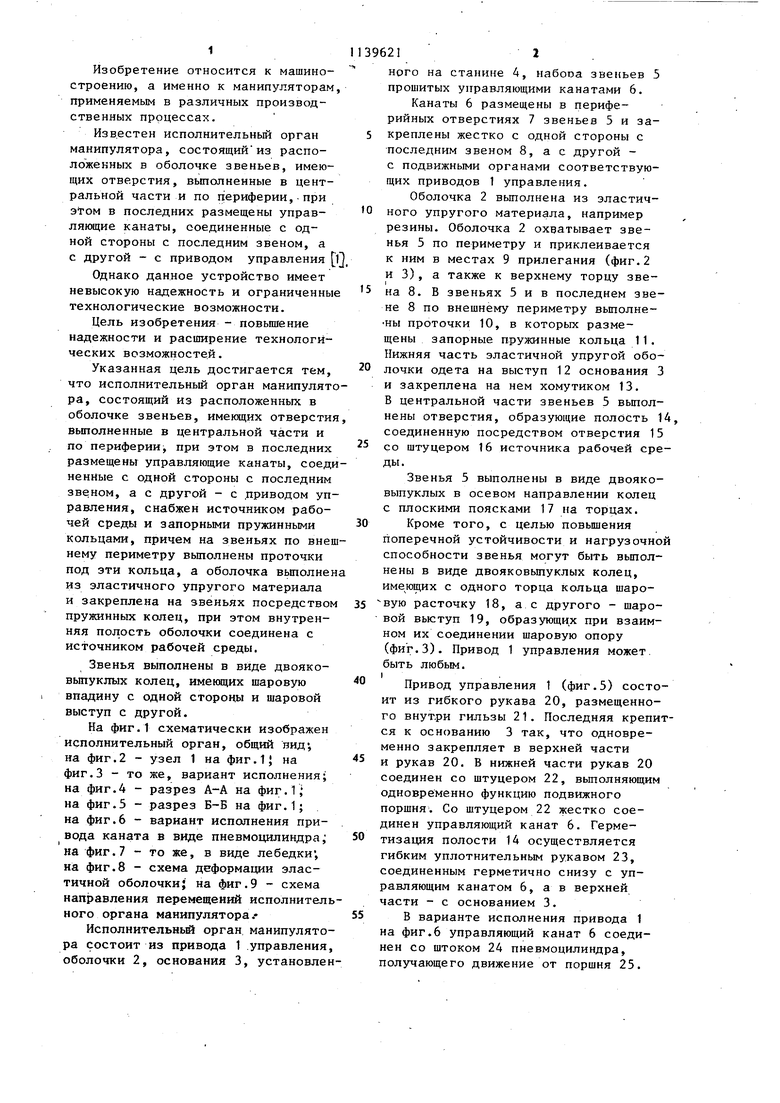
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Манипулятор | 1984 |
|
SU1229027A1 |
| Манипулятор | 1989 |
|
SU1743843A1 |
| Копирующий манипулятор | 1980 |
|
SU933447A2 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1511121A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Исполнительный орган манипулятора | 1984 |
|
SU1283100A1 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832619A1 |
1. ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, состоящий из расположенных в оболочке звеньев, имеющих отверстия, выполненные в центральной части и по периферии, при этом в последних размещены управляющие канаты, соединенные с одной стороны с последним звеном, a с другой - с приводом управления, о тличающийся тем, что, с целью повышения надежности и расширения технологических возможностей, он снабжен источником рабочей среды и запорными пружинными кольцами, причем на звеньях по внешнему периметру выполнены проточки под зти кольца, a оболочка вьтолнена из эластичного упругого материала и закреплена на звеньях посредством пружинных колец, при этом внутренняя полость оболочки соединена с источником рабочей среды. 2.Исполнительный орган манипулятора поп.1,отличающ и и с я тем, что звенья выполнены в виде двояковыпуклых колец. 3.Исполнительный орган манипулятора ПОП.1, отличающийся тем, что звенья вьшолнены в виде двояковьтуклых колец, имеющих шаровую впадину с одной стороны и шаровой выступ с другой.
Х)-/1
/4
Фиг.«
Фие.5
Фиг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании № 1148365, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
