Изобретение относится к робототехнике, более конкретно к гибким манипуляторам с ольшим числом степеней подвижности (свободы). . ..
Целью изобретения является упрощеие конструкции и увеличение надежности работы манипулятора.
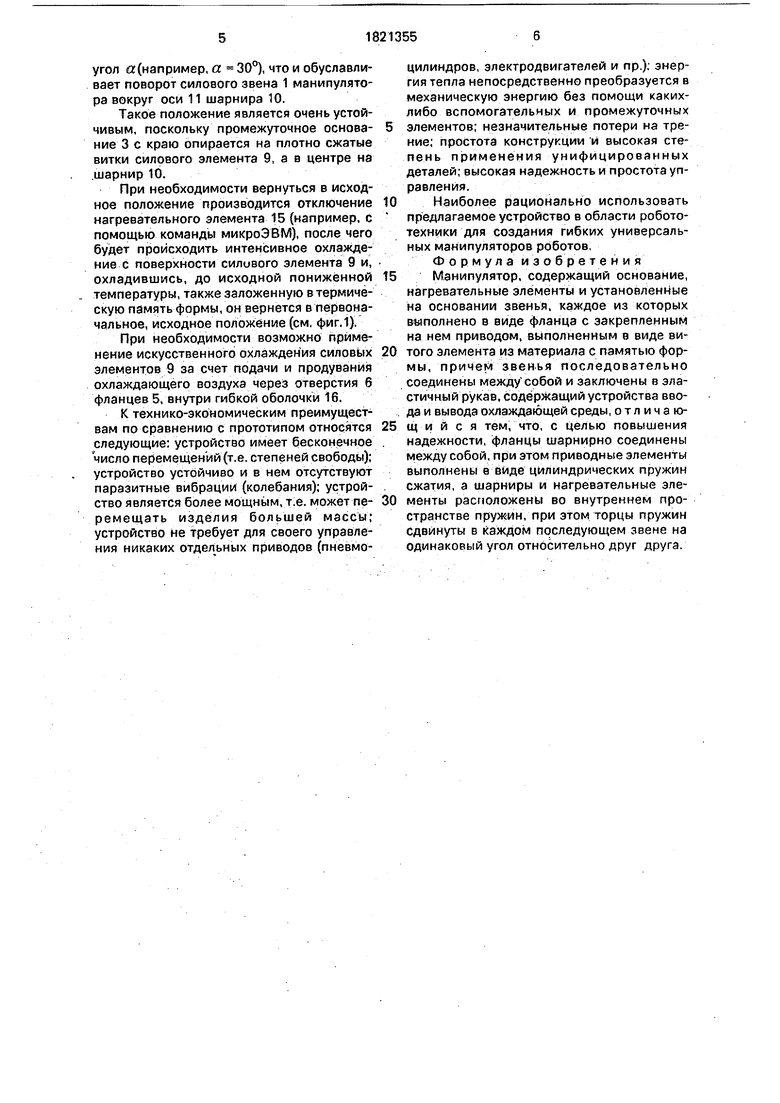
На фиг. 1 показано устройство в проольном сечении, вдоль оси, в полностью обесточенном состоянии, т.е. без нагрева (в холодном); на фиг.2 показано устройство в продольном сечении, вдоль оси, под током (в 1-м и 3-м силовом звене, а 2-е звено - без тока), т.е. в одном из многочисленных рабочих положений.
Приняты следующие обозначения: L - величина перемещения; а-угол поворота между неподвижным.торцом силового элемента и подвижным торцом в рабочем состоянии; t- шаг силового элемента в свободном (холодном) состояний.; :
Предлагаемый электротермический мани пул ятр р состоит из отдел ьных, кинемати- чески и электрически связанных между собой подвижных силовых звеньев 1, которые содержат крайнее основание 2, одинаковые промежуТоч.ньгёоснования 3 и крайнее основание 4 для установки схвата. Все указанные основания 2, 3 и 4 имеют одинаковые фланцы 5 со сквозными отверстиями 6, расположенные по окружности. Основания 2 и 3 име.ют сквозные отверстия 7 для заделки неподвижного конца 8 силового элемента 9, которые расположены на постоянном радиусе оснований 2 и 3 в плоскости поворота шарнира 10 на оси шарнира 11. При этом сквозные отверстия 7 каждого последующего подвижного звена повернуть на одинаковый угол (на пример, 90° или др.) относительно друг друга, вокруг центральной продольной оси манипулято- р а. Неподвижный торец 12 силовбго элемента; 9 опирается на торец крайнего основания 2, которое .повторяет полностью ответную часть формы неподвижного торца 12, а неподвижный конец 8 защемлен жестко в отверстии 7, при этом прРтивопблож ный подвижный торец 13 опирается вторёц (дно) промежуточного основания 3). На центральной части основания 2 с внутренней стороны,;а н а промежуточных основаниях 3 с обеих сторон выступа ют эл емёнты шарнира 10, на которые одеты избляци- рнныё втулки 14 с нагревательными элементами 15. .. , :: . :
Выводные концы нагревательных элементов 15, через каналы в основаниях 2 и 3, выведены наружу и идут к питающему источнику тока и к управляющему устройству.
к. примеру, к микроЭВМ. Выводные концы могут проходить и внутри манипулятора, вдоль его продольной оси, через отверстия б во фланце 5. Нагревательные элементы 15 в
5 каждом силовом звене 1 могут, в зависимости от необходимости, соединяться электрически последовательно или параллельно.
Силовой элемент 9 выполнен из материала с обратимой термической памятью фор- 0 мы (Например, из никелево-титанового сплава или из сплава меди с цинком, алюминием, марганцем и железом) в виде обычной
. витой цилиндрической пружины сжатия (например, с витком круглого сечения) с равно5 мерным шагом 1 в свободном состоянии (прижата и отторцована только опорная часть витка подвижного торца 13). Снаружи, на фланцах 5, по всей длине-манипулятора может быть одета защитная гибкая (напри0 мер, гофрированная) оболочка 16.
Кроме защиты от попадания пыли и посторонних предметов, можно при необходимости интенсивного охлаждения, через оболочку 16 в отверстия 6 во фланцах 5,
5 подавать охлаждающий воздух на силовые элементы 9.,
.Каждое подвижное силовое звено 1 обеспечивает одну степень перемещения (свободы) и в зависимости от необходимости,
0 манипулятор в каждом конкретном случае мо- жетсодержать количество п-подвижных силовых звеньев 1. ,:: Для установки манипулятора и крепления схвата, в крайних основаниях 2 и 4 пре5 дусмотрёны элементы крепления (например, резьбовые гнезда или стержни).
Во время работы (см. фиг.2), в зависимо- , ста от требуемого перемещения и положения манипулятора (на фиг.2 показано/что
0 первое и Третье силовое звено находятся под током и повернуты, а второе (среднее) - без тбка, в:исходном положении) подается - электрический ток в нужные силовые звенья
.. .Т на нагревательные Элементы 15, которые
5 нагревают внутреннюю поверхность еило- . вйх элементрв 9 и при достижений определеннойвеличины повышения температуры, заложенной в термическую память силового элемента 9, он изгибается вдоль своей про0 дольной оси, в плоскости поворота шарнира 10, в сторону неподвижного конца 8. При этом участки витков, лежащие по линии заделки неподвижного конца ё, ложатся один
на другой без зазора (допустимое натягом),
5 а диаметрально противоположная их часть расходится веером, т.е. расстояние между витками в этой части становится большим, чем в свободном (холодном) состоянии. В результате этого между неподвижным тор- цом 12 и подвижным торцом 13 образуется
угол «(например, а - 30°), что и обуславливает поворот силового звена 1 манипулятора вокруг оси 11 шарнира 10.
Такое положение является очень устойчивым, поскольку промежуточное основание 3 с краю опирается на плотно сжатые витки силового элемента 9, а в центре на .шарнир 10.
При необходимости вернуться в исходное положение производится отключение нагревательного элемента 15 (например, с помощью команды микроЭВМ), после чего будет происходить интенсивное охлаждение с поверхности силового элемента 9 и, охладившись, до исходной пониженной температуры, также заложенную в термическую память формы, он вернется в первоначальное, исходное положение (см, фиг.1).
При необходимости возможно применение искусственного охлаждения силовых элементов 9 за счет подачи и продувания охлаждающего воздуха через отверстия б фланцев 5, внутри гибкой оболочки 16.
К технико-экономическим преимуществам по сравнению с прототипом относятся следующие: устройство имеет бесконечное число перемещений (т.е. степеней свободы); устройство устойчиво и в нем отсутствуют паразитные вибрации (колебания); устройство является более мощным , Tie. может перемещать изделия большей массы; устройство не требует для своего управления никаких отдельных приводов (пневмоцилиндров, электродвигателей и пр.); энергия тепла непосредственно преобразуется в механическую энергию без помощи каких- либо вспомогательных и промежуточных 5 элементов; незначительные потери на трение; простота конструкции и высокая степень применения унифицированных деталей; высокая надежность и простота управления.
0 Наиболее рационально использовать предлагаемое устройство в области робототехники для создания гибких универсальных манипуляторов роботов,
Ф о р м у л а изобретения
5 Манипулятор, содержащий основание, нагревательные элементы и установленные на основании звенья, каждое из которых выполнено в виде фланца с закрепленным на нем приводом, выполненным в виде ви0 того элемента из материала с памятью формы, причем звенья последовательно соединены между собой и заключены в эластичный рукав, содержащий устройства ввода и вывода охлаждающей среды, отличаю5 щи и с я тем, что, с целью повышения надежности, фланцы шарнирно соединены между собой, при этом приводные элементы выполнены в виде цилиндрических пружин сжатия, а шарниры и нагревательные эле0 менты расположены во внутреннем пространстве пружин, при этом торцы пружин сдвинуты в каждом последующем звене на одинаковый угол относительно друг друга.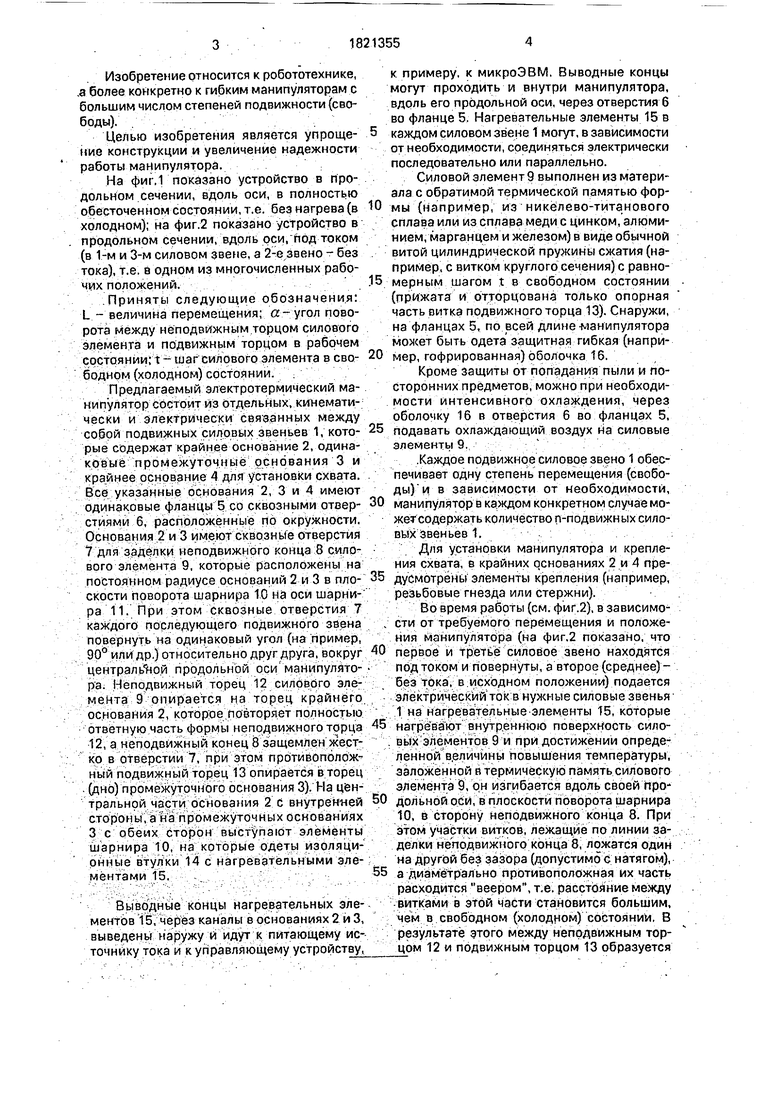
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОТЕРМИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2043918C1 |
| ЭЛЕКТРОТЕРМИЧЕСКОЕ ПРОМЕЖУТОЧНОЕ РЕЛЕ | 1998 |
|
RU2137241C1 |
| ЭЛЕКТРОТЕРМИЧЕСКИЙ СИЛОВОЙ ЭЛЕМЕНТ | 2000 |
|
RU2161835C1 |
| ДИСКОВЫЙ ТОРМОЗ СКОРОСТНОГО ПОДВИЖНОГО СОСТАВА | 1993 |
|
RU2044668C1 |
| ОБЪЕМНЫЙ НАСОС | 1992 |
|
RU2031244C1 |
| Электрический зажим | 1983 |
|
SU1343475A1 |
| Электродинамический прямоходовой компенсатор | 1991 |
|
SU1815684A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| МАГНИТОКОНТАКТНЫЙ ТЕРМОДАТЧИК | 1997 |
|
RU2115895C1 |
| АВАРИЙНЫЙ ТОРМОЗ СКОРОСТНОГО ПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2006402C1 |
Использование: машиностроение, в конструкциях гибких манипуляторов с большим числом степеней подвижности. Сущность изобретения: манипулятор содержит основание 2, нагревательные элементы 15 и установленные на основании звенья. Каждое звено выполнено в виде фланца З.с закрепленным на нем приводом, При этом привод выполнен в виде цилиндрических пружин сжатия 9 из материала с памятью формы. Звенья шарнирно и последовательно соединены между собой и заключены в эластичный рукав. При подаче питания на нагревательные элементы 15, расположенные во внутреннем пространстве пружин, происходит нагрев пружин 9 и при достижении определённой температуры они изгибаются соответствующим образом. Звенья манипуляторег подключаются к источнику питания в зависимости от требуемого перемещения и положения манипулятора. 2 ил. V 00 кэ со ел ел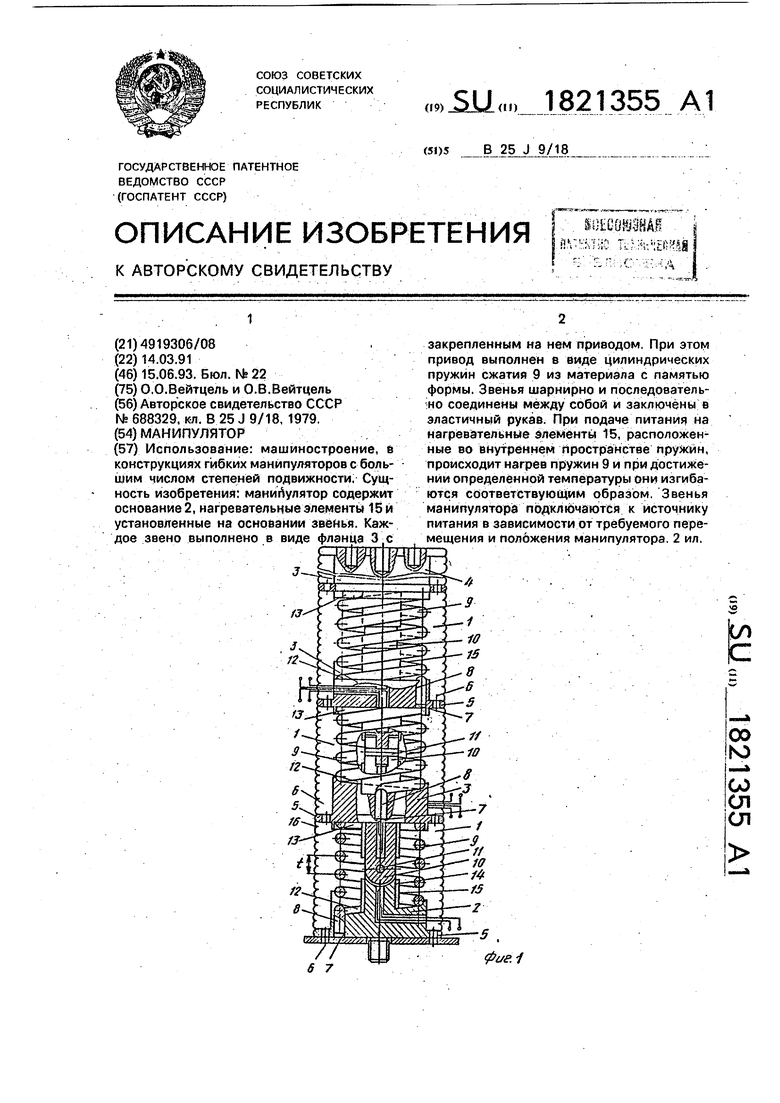
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
