Изобретение относится к области манинуляторов с программным управлением, имеющих агрегатированные с ними приводы управления, и может быть использовано в различных отраслях машиностроения и приборостроения.
Известен манипулятор с программным управлением, содержащий основание, многозвенную механическую руку со схватом н систему управления 1.
Известный манипулятор имеет сложную конструкцию.
Цель изобретения - уирои1,ение конструкции манипулятора.
Для этого в предлагаемом манипуляторе каждое звено механической руки выполнено в виде приводного элемента, приводные элементы соединены между собой последовательно через изоляторы и заключены в эластичный рукав, содсржаихий устройства ввода и вывода охлаждаюп,ей среды, причем каждый приводной элемент выполнен из электропроводного термочувствительного материала, обладающего свойством «памяти формы, например титано-никелевого сплава, и электрически связан с С1 стемой управления.
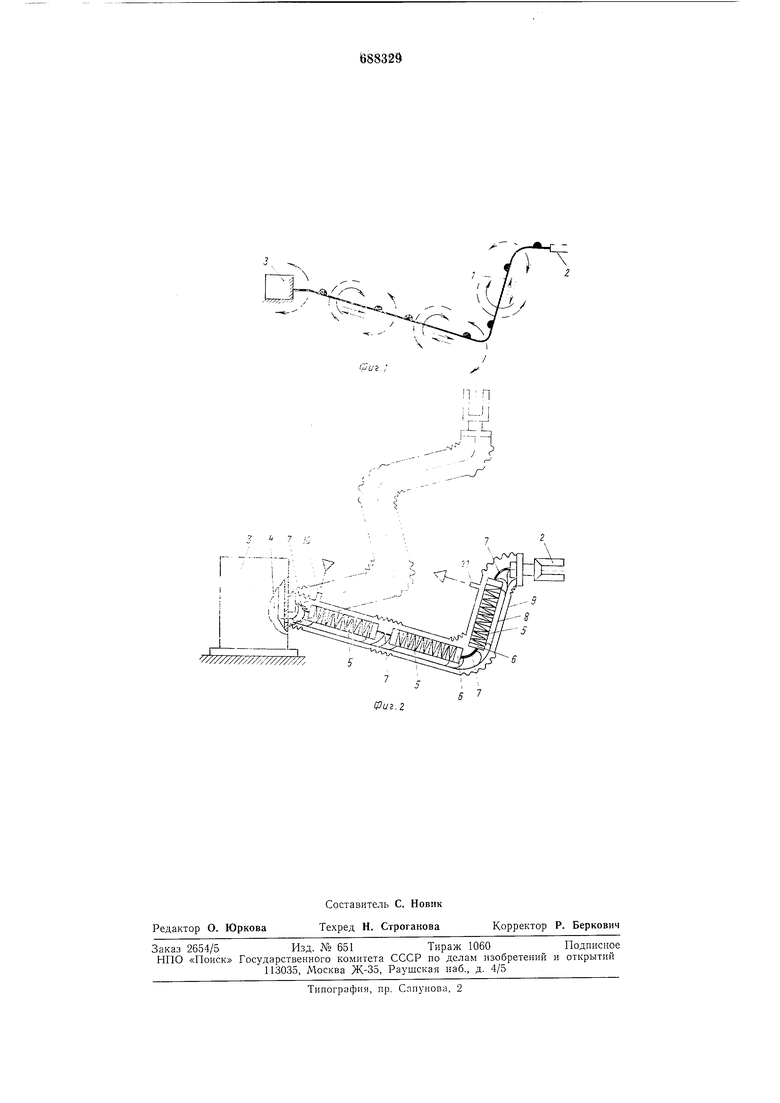
На фиг. 1 изображена кинематическая схема предлагаемого манипулятора; на фиг. 2 - манипулятор, частичный разрез.
Ман шулятор с программным управлением содержит многозвенную механическую руку 1, которая снабжена захватом 2 и связана с основанием 3, несущим блок управленпя 4. Механическая рука 1 содержит три нагреваемых приводных элемента 5, которые последовательно соединены через электропзолятор 6 с нагреваемыми ириводными элементами 7, например, с помощью резьбовых соединений (не показаны). Приводные элементы 5 и 7 выполнены из электропроводного термочувствительного материала, обладаюи.его свойствами «памятп формы, т. с. свойствами многократного обратного нзмененпя формы при многократном иовтореппи циклов нагрева - о.хлаждсния, напрпмср, из титано-н 1келевого сплава (54-56% Р1пкеля, остальное - титан), и электрически связаны проводами 8 с блоком управлення 4.
Механическая рука 1 заключена в эластичный рукав 9 из электропзоляцпопного .материала, например, из резины, гофрированной в местах расположения приводиых элемептов 7. Эластичный рукав 9 имеет штуцер 10 для ввода и штуцер 11 для вывода охлаждаюп1его воздуха.
Нагреваемый приводной элемент 5 выполнен из двух лент титано-нпкелевого сплава, перенлетеппых поочередными загибами друг на друга во взаимно перпендикулярных направлениях и образующих жесткую металлическую гармошку, срабатывающую (изменение длины с одновременным вращением) при изменении температуры (нагрев, охлаждение). Нагреваемый приводной элемент 7 выполнен из прямой или изогнутой пластины титано-никелевого сплава, срабатывающей (изгиб или выпрямление) при изменении температуры (нагрев, охлаждение). Нагрев и охлаждение приводных элементов 5 и 7 обеспечивается по программе от блока управления 4 путем подвода или отключения электрического тока. Ускоренное охлаждение обеспечивается подводимым к рукаву 9 охлаждающим воздухом. Манипулятор с программным управлением работает следующим образом. По заданной программе от блока управления 4 подается электропптание к соответствующему приводному элементу 5, который, нагреваясь до температуры выше60°С, срабатывает, осуществляя перемещение вдоль его продольной осп в сторону захвата 2. Нри подаче электропитания к соответствующему приводному элементу 7 и при нагреве его до температуры выше 60°С осуществляется относительный поворот смежного с ним нриводного элемента 5 (со стороны захвата 2). При этом захват 2 занимает соответствующую программе позицию. При отключении электропитания соответствующих приводных элементов 5 и 7 и охлаждении их воздухом до температуры ниже 40°С все движения приводных элементов 5 и 7 происходят в обратном порядке и в противоноложных направлениях, а захват 2 занимает первоначальное позиционное положение. Механическая рука 1 при этом имеет достаточное количество степеней свободы, обеспечивая широкую область манипулироR а н ИИ. Фор м у л а изобретен и я I. Манипулятор с программным управлением, содержащий основание, многозвенную механическую руку со схватом и систему управления, отличающийся тем, что, с целью упрощения конструкции, каждое звено механической руки выполнепо в виде приводного элемента, приводные элемеиты соединены между собой постедовательно через изоляторыи заключены вэтастичиый рукав, содержащий устройства ввода п вывода охлаждающей среды, причем каждый приводной элемент выполнен из электропроводного термочувствительного .материала, обладающего свойством «памяти формы и электрическп связан с системой управления. 2. .Манипулятор по п. 1, отличающийс я те.м, что приводные элементы выполнены из титано-никелевого сплава. Источники информации, принятые во виимание при экспертизе 1. Авторское свидетельство СССР 510362, кл. В 25J 9/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука манипулятора | 1986 |
|
SU1414626A1 |
| Схват | 1986 |
|
SU1388281A1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
| Манипулятор модульного типа | 1987 |
|
SU1435422A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Рука манипулятора с программным управлением | 1990 |
|
SU1815207A1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| Силовой термочувствительный элемент | 1987 |
|
SU1442693A1 |
Фиг.г
