I
6
31513140
Изобретение относится к горному елу и может быть использовано при роведении горных работ добычными и проходческими машинами, использующи™ . и в качестве главного привода кронный двигатель, а подача предпоч тительна гидравлическая.
Целью изобретения является повышение надежности и увеличение меж- jo ремонтного срока горной машины путем использования только оптимальных для имеющегося уровня напряжения сети энергетических возможностей главного двигателя при управлении горной 15 машиной.
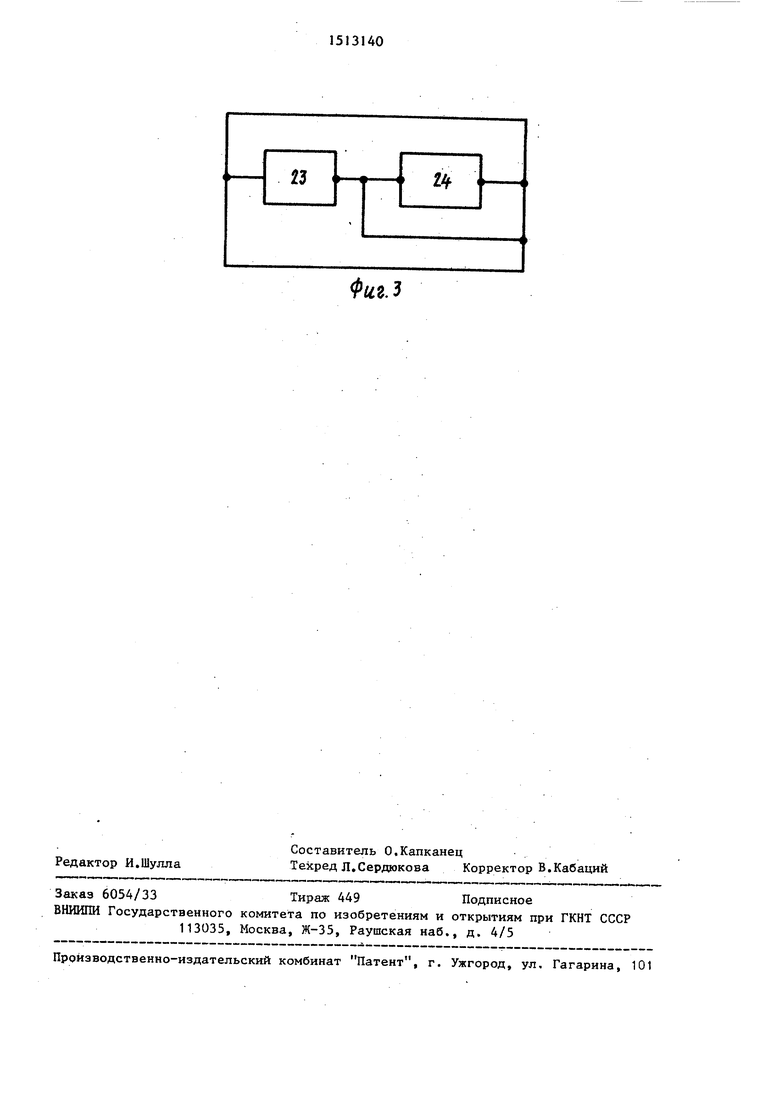
На фиг.1 представлено устройство управления горной машиной; на фиг.2 - блок управления; на фиг.З - блок сравнения.20
Устройство управления горной машиной содержит датчик 1 тока главного двигателя и датчик 2 напряжения питающей сети, усилитель 3, соединен- ньй с первьм блоком 4 сравнения, ре. -25 Гулятор 5 нагрузки, выход которого соединен с входом исполнительного элемента 6, преобразователь 7 напряжения, связанный с входом второго блока 8 сравнения, датчик 9 активной 30 мощности и датчик 10 реактивной мощности, соединенные соответственно с входами третьего блока 11 сравнения и четвертого блока 12 сравнения, блок 13 управления, с первого по вось-)5 мой входы которого соединены соответственно с выходами первого 4, второго 8, третьего 11 и четвертого 12 блоков сравнения, а первый и второй выходы блока 13 управления соединены 40 с первым и вторым выходами регулятора 5 нагрузки.
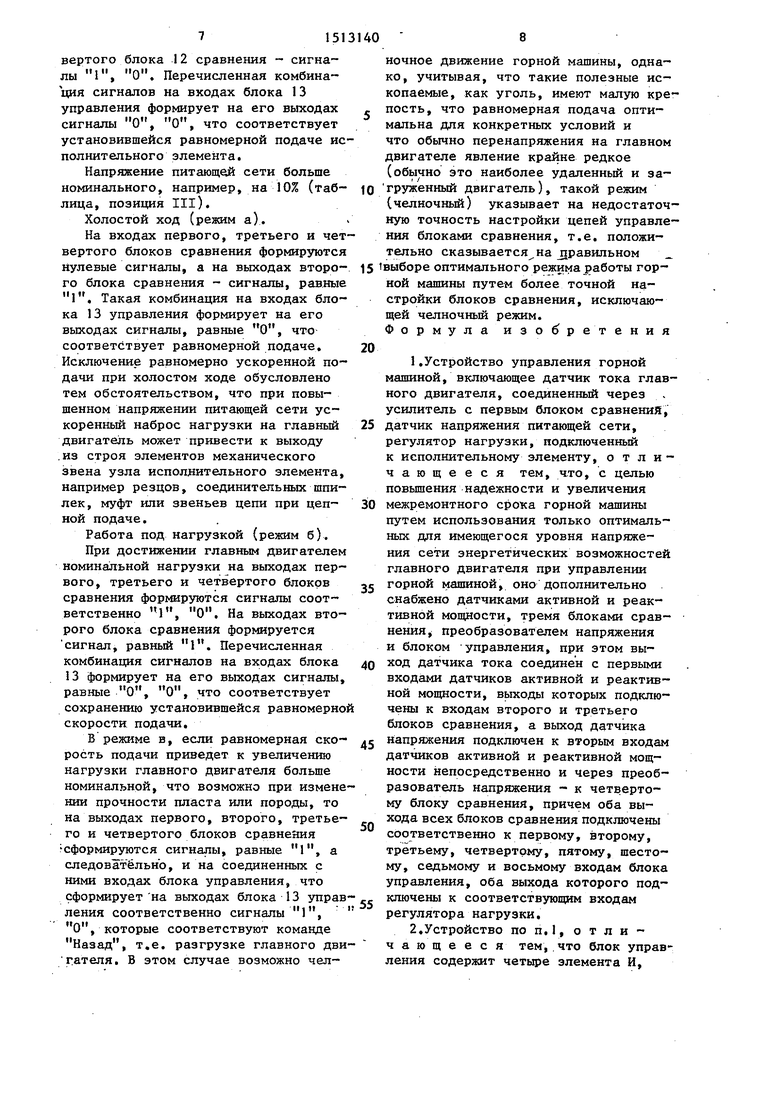
Блок 13 управления содержит четыре элемента И 14-17, два элемента ИЛИ 18 и 19, элемент.И-НЕ 20 и два 45 элемента НЕ 21 и 22, причем первый и второй входы блока 13 управления являются первым и вторым входами первого логического элемента И 14, выход которого является первым Q входом первого логического элемента ИЛИ 18, второй вход которого соеди- иен с.вторым входом блока 13 управления, третий и четвертый входы блока 13 управления являются первым и 5 вторым входами второго элемента И 15, пятый и шестой входы блока 13 управления являются первым и вторым входа- - ми третьего элемента И 16, а седьмой и восьмой входы блока 13 управления являются первым и вторым входами четвертого элемента И 17, выход которого является вторым входом элемента И-НЕ 20, первьй вход которого соединен с выходом третьего элемента И 16 выходы второго элемента И 15 и первого элемента ИЛИ 18 являются первым и вторым входами второго элемента ИЛИ 19, выход которого соединен с входом первого элемента НЕ 21, выход которого является вторым выходом блока 13 управления, а первый выход блока 13 управления соединен с выходом второго элемента НЕ 22, вход которого соединен с выходом элемента И-НЕ 20.
Блок 4 сравнения, например, содержит два пороговых элемента 23 и 24, причем вход первого порогового элемента 23 является входом блока 4 сравнения, второй вьпсод которого является выходом второго поропового элемента 24, вход которого соединен с выходом первого порогового элемента 23 и является первым выходом блока 4 сравнения. Остальные блоки 8, П и 12 сравнения аналогичны блоку 4 сравнени я. Ра зница их в том, что паспортные характеристики стабилитронов, уровни их срабатывания выбираются из известных полученных расчетным путем значений соответс твующих величин для каждого принятого порога уровня напряжения питающей сети.
Под регулятором нагрузки понимается стандартный блок управления цепной, гидравлической или пневматической подачи горной машины, у которой при комбинации сигналов на входах О, 1 осуществляется подача Вперед с ускорением, т.е. увеличение нагрузки при сигналах О, О равномерная подача Вперед, т.е. установившаяся нагрузка, а при сигналах 1, О осуществляется подача Назад, т.е. сброс нагрузки. Принимается, что техническое состояние горной машийы не имеет отклонений от нормы, а в период пуска главного двигателя датчик тока зашунтирован и пуск происходит вхолостую. В качестве датчиков напряжения и тока могут быть использоЬаны из меритель- ные трансформаторы, выходные сигналы с которых преобразуются до необходимых уровней по известным схемам и методикам.
15
В работе устройства рассмотрены три ступени уровня напряжения питающей сети, хотя количество ступеней регулирования может быть больше, что влечет за собой увеличение числа пороговых элементов в блоках сравнения и числа входов, а следовательно, логических элементов в блоке управления.
Устройство управления горной машиной работает следующим образом.
Напряжение питающей сети равно номинальному (таблица, позиция I).
Холостой ход (режим а).
Через датчик 1 тока проходит ток холостого хода главного двигателя, на выходе датчика тока при этом формируется сигнал, пропорциональный току холостого хода, который подается на вход усилителя 3, токовые входы датчиков активной мощности 9 и реактивной мощности 10. Одновременно на вход датчика 2 напряжения подается напряжение сети, с выхода которого сигнал, пропорциональный напряжению сети, подается на вход преобразователя 7 напряжения и входы датчиков реактивной мощности 10 и активной мощности 9.
На выходе усилителя 3 формируется сигнал, пропорциональный току двигателя, необходимый для работы первого блока 4 сравнения.
На выходе преобразователя 7 формируется сигнал, пропорциональный напряжению сети, необходимый дпя работы второго блока 8 сравнения, при этом на выходах второго блока 8 сравнения формируются сигналы, соответствующие 1 и О.
На выходе датчика 9 активной мощности формируется сигнал, пропорциональный активной мощности, который подается на вход третьего блока 11 сравнения, на выходах которого формируются сигналы, равные О.
На выходе датчика 10 реактивной мощности формируется сигнал, пропорциональный реактивной мощности, который подается на вход четвертого блока 12 сравнения, на выходах которого формируются сигналы, равные О
140
соответствует увеличению подачи исполнительного элемента.
Работа под нагрузкой (режим б). После окончания режима холостого хода увеличение подачи, а следовательно, нагрузка на двигатель происходит до тех пор, пока нагрузка двигателя не станет номинальной. При
д достижении номинальной нагрузки на выходах первого блока 4 сравнения формируются сигналы соответственно 1 и О, которые подаются на первый и второй входы блока 12 управле5 ния, на выходах второго блока 8 сравнения формируются сигналы, равные 1 и О, которые подаются соответственно на третий и четвертый входы блока 13 управления, сигналы 1,.
0 О формируются также на выходах третьего 11 и четвертого I2 блоков сравнения. При сигналах, равных О на первом, четвертом, шестом и восьмом входах и 1 на втором,
5 третьем, пятом и-седьмом входах блока 13 управления, на его формируются сигналы
выходах О.
О, что соответствует установившей- ся равномерной подаче, т.е. равно- мерной нагрузке на главном двигателе.
Напряжение сети меньше номинального, например, на 10% (таблица, позиция II).
Холостой ход (режим а).
На выходах первого блока 4 сравнения формируются сигналы соответст венно О
На выходах второго
45
50
блока 8 сравнения формируются сигна- дд лы О, О. На выходах третьего
блока 21 сравнения и четвертого блока
12сравнения сигналы также равны О, т.е. на всех входах блока 13 управления присутствуют сигналы, равные О, при этом на выходах блока
13управления формируются сигналы со- ответственно О и 1, что соответствует увеличению подачи исполнительного элемента.
Работа под нагрузкой (режим б).
При достижении главным двигателем оптимального уровня нагрузки, соответствующего выбранному уровню напря
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления горной машиной и устройство для его осуществления | 1987 |
|
SU1502828A1 |
| Способ управления горной машиной | 1989 |
|
SU1805214A1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ | 1988 |
|
RU2041353C1 |
| Способ определения оптимального технического состояния механизмов многодвигательного одноковшового экскаватора и стенд для его осуществления | 1990 |
|
SU1774008A1 |
| Устройство для регулирования напряжения | 1987 |
|
SU1474758A1 |
| Источник реактивной мощности узла нагрузки | 1988 |
|
SU1661910A1 |
| Устройство для регулирования напряжения | 1986 |
|
SU1474794A1 |
| Устройство для регулирования напряжения | 1982 |
|
SU1089700A1 |
| Устройство продольно-поперечного регулирования напряжения сети | 1989 |
|
SU1677774A1 |
| Устройство для регулирования напряжения | 1982 |
|
SU1130946A1 |
Изобретение относится к горному делу и может быть использовано при проведении горных работ добычными и проходческими горными машинами (ГМ), использующими в качестве главного привода асинхронный двигатель, а подача предпочтительна гидравлическая. Цель - повышение надежности и увеличение межремонтного срока ГМ путем использования только оптимальных для имеющегося уровня напряжения сети энергетических возможностей главного двигателя (ГД) при управлении ГМ. Для этого устройство снабжено датчиками активной 9 и реактивной 10 мощностей, тремя блоками сравнения (БС) 8,11,12, преобразователем 7 напряжения и блоком 13 управления, выходы которого через регулятор 5 нагрузки подключены к входам исполнительного элемента 6. На входы блока 13 управления поступают сигналы с датчиков 9 и 10 через соответствующие БС 11 и 12, датчика 2 напряжения питающей сети через последовательно соединенные преобразователь 7 и БС 8 и датчика 1 тока ГД через последовательно соединенные усилитель 3 и БС 4. Устройство позволяет оптимизировать нагрузку ГД с помощью корректировки последней не только по току, напряжению и номинальному значению угла сдвига между ними, но и по реальным, существующим на момент корректировки, уровням напряжения питающей сети, активной и реактивной мощностям. Значения последних для данного уровня напряжений определены заранее и в виде пороговых напряжений сравниваются. Наличие информации об активной и реактивной мощностях дают информацию об общем техническом состоянии ГМ. 1 з.п.ф-лы, 3 ил., 1 табл.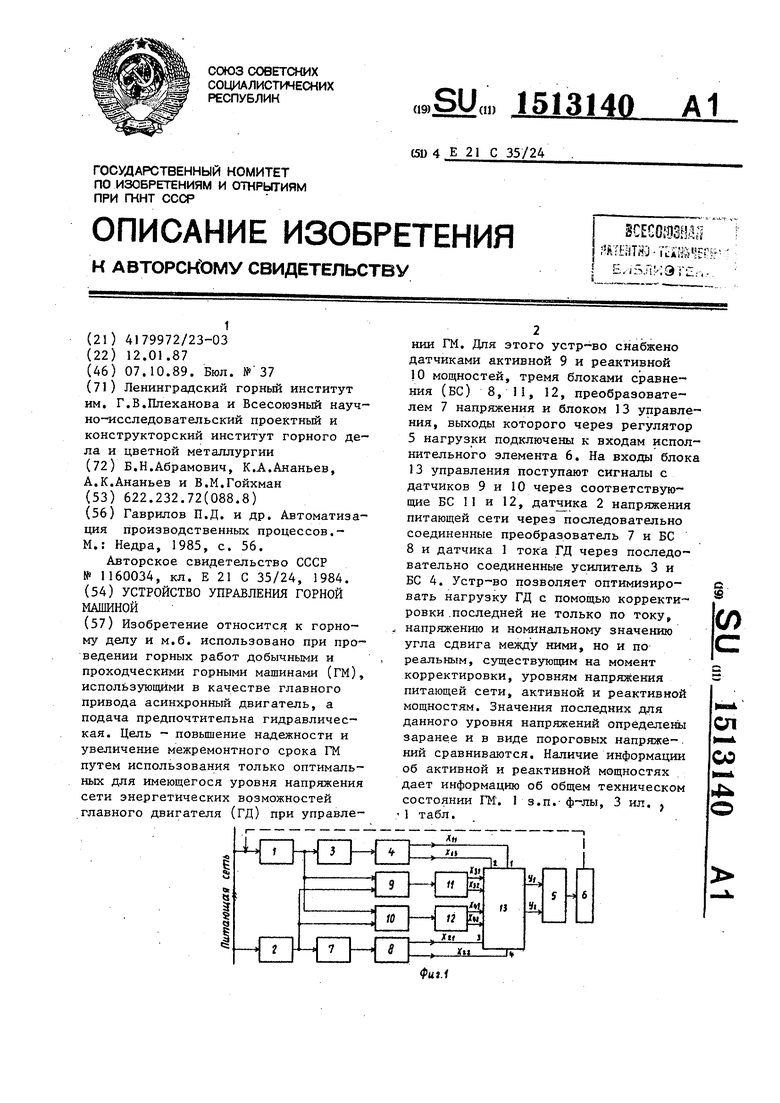
При сигналах, равньк 1 на треть- жения, на выходах первого блока 4
ем входе блока 13 и О на остальных входах блока 13 управления, на его выходах формируются сигналы соответственно О, 1, которые подаются на входы регулятора 5 нагрузки, что
сравнения формируются сигналы, -рав
О , на выходах второго блока
8 сравнения - сигналы О, О, на
выходах третьего блока сигналы I. О
11 сравнени а на выходах чет
сравнения формируются сигналы, -равные
О , на выходах второго блока
8 сравнения - сигналы О, О, на
выходах третьего блока сигналы I. О
11 сравнения - а на выходах четвертого блока 12 сравнения - сигналы I, О. Перечисленная комбинация сигналов на входах блока 13 управления формирует на его выходах сигналы О, О, что соответствует установившейся равномерной подаче исполнительного элемента.
Напряжение питающ сети больше номинального, например, на 10% (таблица, позиция III).
Холостой ход (режим а). На входах первого, третьего и четвертого блоков сравнения формирзпются нулевые сигналы, а на выходах второго блока сравнения - сигналы, равные 1. Такая комбинация на входах блока 13 управления формирует на его выходах сигналы, равные О, что соответствует равномерной подаче. Исключение равномерно ускоренной подачи при холостом ходе обусловлено тем обстоятельством, что при повышенном напряжении питающей сети ускоренный наброс нагрузки на главный двигатель может привести к выходу .из строя элементов механического звена узла исполнительного элемента, например резцов, соединительных шпилек, муфт или звеньев цепи при цепной подаче.
Работа под нагрузкой (режим б). При достижении главным двигателем номинальной нагрузки на выходах первого, третьего и четвертого блоков сравнения формируются сигналы соответственно 1, О. На выходах второго блока сравнения формируется сигнал, равный 1. Перечисленная комбинация сигналов на входах блока 13 формирует на его выходах сигналы, равные О, О, что соответствует сохранению установившейся равномерно скорости подачи.
В режиме в, если равномерная скорость подачи приведет к увеличению нагрузки главного двигателя больше номинальной, что возможно при изменении прочности пласта или породы, то на выходах первого, второго, третьего и четвертого блоков сравнения сформируются сигналы, равные 1, а следовательно, и на соединенных с ними входах блока управления, что сформирует на выходах блока 13 управления соответственно сигналы 1, О, которые соответствуют команде Назад, т.е. разгрузке главного дви гателя. В этом случае возможно челночное движение горной машины, однако, учитывая, что такие полезные ископаемые, как уголь, имеют малую крепость, что равномерная подача оптимальна для конкретных условий и что обычно перенапряжения на главном двигателе явление крайне редкое (обычно это наиболее удаленньй и за груженный двигатель), такой режим
(челночный) указывает на недостаточную точность настройки цепей управления блоками сравнения, т.е. положительно сказывается на правильном
выборе оптимального режима работы горной машины путем более точной н$- стройки блоков сравнения, исключающей челночный режим. Формула изобретения
датчик напряжения питающей сети, регулятор нагрузки, подключенный к исполнительному элементу, отличающееся тем, что, с целью повьшения надежности и увеличения
межремонтного срока горной машины путем использования только оптимальных для имеющегося уровня напряжения сети энергетических возможностей главного двигателя при управлении
горной машиной, оно дополнительно снабжено датчиками активной и реактивной мощности, тремя блоками срав нения преобразователем напряжения и блоком управления, при этом выход датчика тока соединен с первыми входами датчиков активной и реактивной мощности, вьпсоды которых подключены к входам второго и третьего блоков сравнения, а выход датчика
напряжения подключен к вторым входам датчиков активной и реактивной мощности непосредственно и через преобразователь напряжения - к четвертому блоку сравнения, причем оба выхода всех блоков сравнения подключены соответственно к первому, второму, третьему, четвертому, пятому, шестому, седьмому и восьмому входам блока управления, оба выхода которого подключены к соответствующим входам регулятора нагрузки.
2,Устройство по П.1, отличающееся тем, что блок управления содержит четыре элемента И,
два элемента ИЛИ, два элемента НЕ и один элемент И-НЕ, причем выход первого элемента И подключен к первому входу первого элемента ИЛИ, выход второго подключен к первому входу второго элемента ИЛИ, выход которого соединен с входом первого элемента НЕ, рыход второго элемента И подключен к второму входу второго элемента ИЛИ, а входы третьего и четвертого элементов ИЛИ соединены соответст
314010
венно с первым и вторым входами элемента И-НЕ, выход которого подключен к входу второго элемента НЕ, при этом объединенные первые входы первого элемента ИЛИ и первого элемента И являются первым входом блока управления, остальными семью входами которого являются входы четырех эле- to ментов И, а выходами блока управления являются выходы обоих элементов НЕ.
Фиг. 2
Фиг.З
| Гаврилов П.Д | |||
| и др | |||
| Автоматизация производственных процессов.- М.: Недра, 1985, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Авторское свидетельство СССР № 1160034, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
