1
(21)4263145/24-10
(22)15.06.87
(46) 07.10.89. Бш. № 37 1(72) В.Н.Умников, И.А.Бугаков иА СоТерехов
(53) 681.269(088.8) ;(56) Авторское свидетельство СССР
№ 964472, кл. G 01 G 9/00, 1980. Феоктистов В.Г. Лабораторные весы.
М.: Изд-во стандартов, 1979, с. 24.
(54) СПОСОБ ИЗМЕРЕНИЯ МАССЫ ГРУЗА .
(57) Изобретение относится к области весоизмерительной техники. Для повышение быстродействия измерений грузо- приемная подставка 1 подвешена на пружине 2, введены датчик 3 уровней, измеритель 4 временных интервалов, ключ 5, обратный преобразователь, состоящий из катушки 6 и магнита 7, микропроцессор 8, Значения массы гру-. за вычисляй по времени прохождения подставкой 1 между даданньвш уровнями, 1 ил.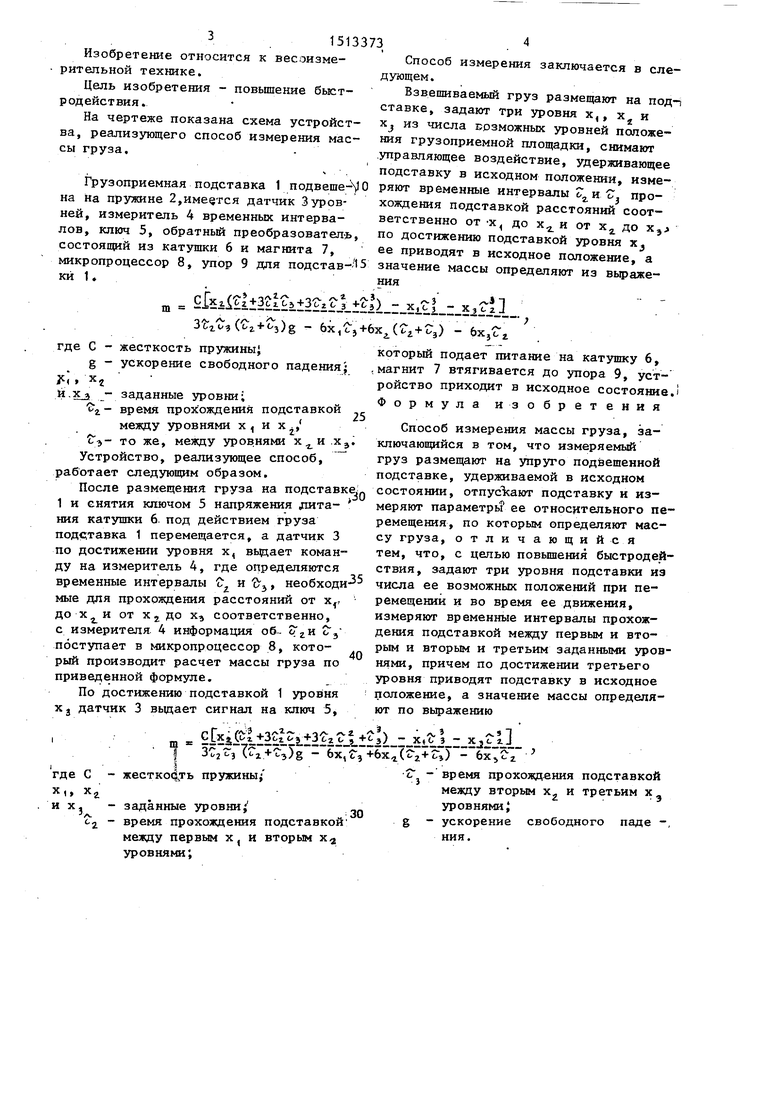
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ РЫЧАЖНЫМИ ВЕСАМИ | 1991 |
|
RU2017078C1 |
| Весовой плотномер | 1979 |
|
SU785685A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Электромагнитные весы | 1988 |
|
SU1627854A1 |
| Весоизмерительное устройство | 1976 |
|
SU653516A1 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Весоизмерительное устройство | 1990 |
|
SU1789876A1 |
| Весы с электромагнитным уравновешиванием | 1981 |
|
SU993036A1 |
| Электронные цифровые весы | 1980 |
|
SU943533A1 |
Изобретение относится к области весоизмерительной техники. Для повышения быстродействия измерений грузоприемная подставка 1 подвешена на пружине 2, введены датчик 3 уровней, измеритель 4 временных интервалов, ключ 5, обратный преобразователь, состоящий из катушки 6 и магнита 7, микропроцессор 8. Значения массы груза вычисляют по времени прохождения подставкой 1 между заданными уровнями. 1 ил.
i
31513373
Изобретение относится к весоизмерительной технике.
Цель изобретения - повьшение быстродействия.
Взвешиваемый груз размещают на подставке, задают три уровня х,, х и
ва, реализующего способ измерения массы груза.
На чертеже показана схема устройст- х из числа возможных уровней положения грузоприемной площадки, снимают .управляющее воздействие, удерживающее . . подставку в исходном положении, измеГрузоприемная подставка 1 подвеше- 10 ряют временные интервалы и про- на на пружине 2,имеется датчик Зуров-
ней, измеритель 4 временных интервалов, ключ 5, обратньй преобразовател-ь, по достижению подставкой уровня х состоящий из катушки 6 и магнита 7,ее приводят в исходное положение а
микропроцессор 8, упор 9 для подстав-;15 значение массы определяют из выраже- ки 1.
г хождения подставкой расстояний соответственно от-х до х,г и от X
5 до XjJ
ния
сГ
З Z.
который подает питание на катушку 6, магнит 7 втягивается до упора 9, устройство приходит в исходное состояние Формула изобретения
ш -5iI5il3 22.),.
3tif, ()g - 6x,j+6x(i + C,) - 6х где С - жесткость пружины}
g - ускорение свободного падения;
ft г
H.xji. заданные уровни;
время прох ождения подставкой
между уровнями х, и х, Способ измерения массы груза, то же, между уровнями .х. ключающийся в том, что измеряемый
Устройство, реализующее способ, груз размещают на упруго подвешенной работает следующим образом.подставке, удерживаемой в исходном
После размещения груза на подставка- состоянии, отпускают подставку к из- 1 и снятия ключом 5 напряжения лита- ния катушки 6. под действием груза подс;тавка 1 перемещается, а датчик 3 по достижении уровня х, вьщает команду на измеритель 4, где определяются временные интервалы С и сУ, необходи- мые для прохождения расстояний от х, до X и от Xj до Хэ соответственно, с измерителя 4 информация об- и С, поступает в микропроцессор 8, который производит расчет массы груза по
40
меряют параметры ее относительного пе ремещения, по которым определяют массу груза, отличающийся тем, что, с целью повьшения быстродей ствия, задают три уровня подставки из числа ее возможных положений при перемещении и во время ее движения, измеряют временные интервалы прохождения подставкой между первым и вторым и вторым и третьим заданными уров нями, причем по достижении третьего уровня приводят подставку в исходное положение, а значение массы определяют по выражению
приведенной формуле.
По достижению подставкой 1 уровня X, датчик 3 вьщает сигнал на ключ 5,
где С - жестко4ть пружины;
л о их.
X,
(И +зсгг-, +3-62 гt )
ЗС2 гГз Т Г+ э)(
- время прохождения подставкой меяаду вторым х и третьим х уровнями{
g - ускорение свободного паде -, ния.
- заданные уровни; д
2 - время прохождения подставкой между первым х, и вторым х уровнями;
Способ измерения заключается в следующем.
Взвешиваемый груз размещают на под, ставке, задают три уровня х,, х и
х из числа возможных уровней положения грузоприемной площадки, снимают управляющее воздействие, удерживающее подставку в исходном положении, изме ряют временные интервалы и про-
по достижению подставкой уровня х ее приводят в исходное положение а
г хождения подставкой расстояний соот по достижению подставкой уровня х ее приводят в исходное положение а
ветственно от-х до х,г и от X
5 до XjJ
знач
ния
З Z.
который подает питание на катушку 6, магнит 7 втягивается до упора 9, устройство приходит в исходное состояние. Формула изобретения
(i + C,) - 6х
состоянии, отпускают подставку к из-
меряют параметры ее относительного перемещения, по которым определяют массу груза, отличающийся тем, что, с целью повьшения быстродействия, задают три уровня подставки из числа ее возможных положений при перемещении и во время ее движения, измеряют временные интервалы прохождения подставкой между первым и вторым и вторым и третьим заданными уровнями, причем по достижении третьего уровня приводят подставку в исходное положение, а значение массы определяют по выражению
