(54) ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронные цифровые весы | 1980 |
|
SU932260A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Цифровая система автоматической регистрации веса | 1986 |
|
SU1434269A2 |
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| Устройство для измерения электрических величин | 1987 |
|
SU1525592A1 |
| Устройство для цифровой регистрации веса | 1982 |
|
SU1037080A1 |
| УСТРОЙСТВО ЗАЩИТЫ СВЕТОДИОДОВ ОТ ПЕРЕГРУЗОК | 2013 |
|
RU2572378C2 |
| Устройство для измерения поверхностного натяжения жидкости | 1983 |
|
SU1157408A1 |

Изобретение относится к весоизмерительной технике.
Известны весы с зрлектромагнитной системой компенсации отклонения, содержащие упругий элемент с уравновешивающей катушкой, подключенно.й к схеме, вырабатывающей компенсационный ток 1.
Эти весы не обеспечивают требуемую точность.
Ближайшими ft изобретению по технической сущности являются электронные цифровые весы, содержащие независимо подвешенные эталонную и нагрузочную подвижные системы с компенсационными катушками, находящимися в воздушном зазоре магнитной системы, соединенные последовательно датчик положения, регулятор тока, компенсационную катушку эталонной подвижной системы, буфер и первый вход электронного ключа, соединенные между собой датчик положения и регулятор тока нагрузочной подвижной системы, генератор, соединенный через делитель частоты с широтно-импульсным модулятором и первым входом преобразователя частоты в код, и вентиль, один вход которого соединен с генератором, другой йход - с вторым входом электронного ключа и выходом широтно-импульсного модулятора, а выход вентиля подключен к второму входу преобразователя частоты в код (2.
Недостаток известного устройства заключается в неудовлетворительной точности, которая определяется наличием пульсации выходного тока из-за пульсации напряжения на выходе буфе10ра, вызванной работой э.пектронного ключа, подключающего попеременно выход буфера к компенсационной катушке и вспомогательной нагрузке.
Цель изобретения - повышение точ15ности измерения.
Поставленная цель достигается тем, что в весы введен интегратор тока, вход которого соединен с выходом электронного ключа и вторым
20 выводом компенсационной катушки нагрузочной подвижной системы, а выход интегратора тока соединен с управляющим входом широтно-импульсного модулятора.
25
Кроме того, электронный ключ выполнен в виде двух диодов, одноименные электроды которых соединены между собой и с выходом буфера, второй электрод первого диода соединен
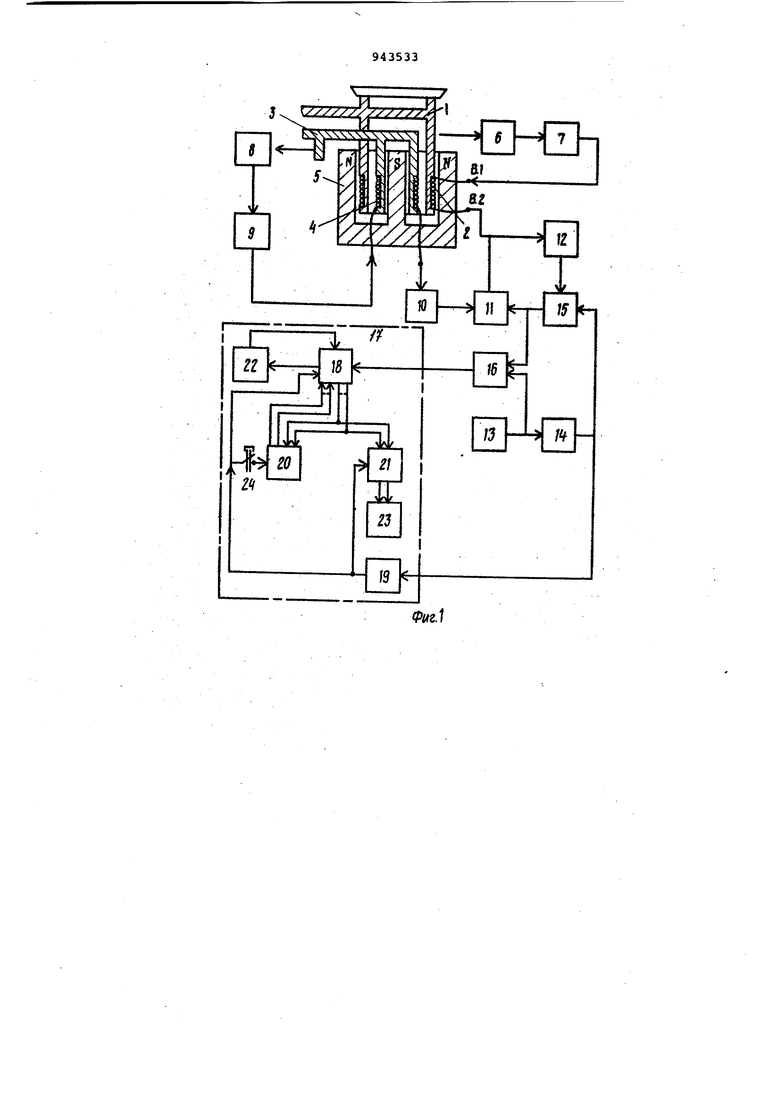
30 с выходом широтно-импульсного модулятора и входом вентиля, второй элек трод второго диода соединен со вторым выводом компенсационной катушки подвижной системы и входом интегратора тока. Сущность решения заключается, в том, что широтно-импульсный модулятор, благодарянизкому входному сопротивлению по переменному току интегратора тока (в качестве которого может использоваться, например, конденсатор) , обеспечивает постоянство напряжения иа выходе электронного ключа во всех режимах работы весов. Это исключает погрешность нелинейнос ти весов из-за пульсаций напряжения на буфере и необходимость конденсатора большой .емкости, включенного параллельно компенсационной катушке нагрузочной подвижной системы. Кроме того, с целью упрощения конструкции и сокращения .количества оборудования, может быть введен источник опорного тока соединенный со входом буфера. На фиг. 1 представлена блок-схема электронных цифровых весов; на фиг, схема интегратора тока и электронного ключа; на фиг. 3 - схема подключения источника опорного тока. Электронные цифровые весы содер.жат (фиг. 1) нагрузочн то подвижную систему 1 с компенсационной катушкой 2, эталонную подвижную систему 3 с компенсационной катушкой 4, магнитную систему 5, датчик положения 6 и регулятор тока 7 нагрузочной подвижной системы, датчик положения 8 и регулятор тока 9 эталонной подвижной системы, буфер 10, электронный ключ 11, интегратор тока 12, генератор 13, делитель частоты 14, широтно импульсный модулятор 15, вентиль 16 преобразователь 17 частоты в цифровой код, состоящий из реверсивного счетчика 18, делителя частоты 19 регистра тары 20, регистра- результата 21, дектора нуля 22, индикатора 23 кнопки Электронный ключ 11 (фиг. 2) содержит два диода 25 и 26, интегратор тока 12 .содержит операционный усилитель 27, конденсатор 28, источник смещения 29. Весы работают следующим образом. При наложении груза на грузоприемную чашку нагрузочной подвижной системы 1, последняя отклоняется от исходного положения. Датчик 6 вырабатывает сигнал разбаланса, поступак)щий на вход регулятора тока 7. Регулятор 7 изменяет ток, протекающий через катушку 2. Сила электромагнитного взаимодействия тока в катушке 2 с магнитным полем в воздушном зазоре магнитной системы 5 изменяется таким образом, что возвращает подвижную систему 1 в исходное положение. После окончания переходного процесса система 1 находится в исходном положении, а ток, протекающий через катушку 2, пропорционален массе измеряемого груза и индукции в зазоре системы 5. .Аналогично контуру нагрузочной подвижной системы работает эталонный контур, состоящий из подвижной системы 3 с катушкой 4, датчика положения 8 и регулятора 9. Система 3 аналогично системе 1 находится в одном положении. Ток, протекающий через катушку 4, пропорционален массе подвижной системы 3 и индукции в зазоре системы 5. Масса эталонной подвижной системы неизменна и отношение тока через катушку 2 к току через катушку 4 пропорционально измеряемой массе и не зависит от индукции в зазоре системы 5. Ммг--к. где М - масса нагрузочной подвижной системы с измеряемым грузом; К - коэффициент преобразования устройства, является постоянным для данных компенсационных катушек и данной массы эталонной системы с большой степенью точности; Эд - ток, протекающий через эталонную катушку 4; Dt, - ток, протекающий через катушку 2. Все остальные элементы весов осуществляют измерение отношения токов через катушку 2 к току через катушку 4 и отображение результата на индикаторе 23. Это- измерение осуществляется следующим образом. Конструкция весов такова, что ток последовательно соединенных эталонной катушки 4 и буфера 10 больше максимально возможного тока нагрузочной катушки 2 и в течение времени открытого состояния ключа 11 в интегратор 12 поступает разностный ток катушки 4 и катушки 2. Во время закрытого состояния ключа 11 на выходе интегратора 12 протекает ток катушки 2. . Интегратор 12 обладает низким входным сопротивлением по переменному току, что обеспечивает постоянство напряжения на его выходе за период работы ключа 11. Выходной сигнал интегратора 12 зависит от среднего значения его входного тока. В соответствии с этим сигналом модулятор 15 меняет скважность сигнала На управлякядем входе ключа 11 (период выходного сигнала модулятора 15 определяется периодом сигнала на выходе делителя частоты 14). В установившемся режиме работы напряжение на входе интегратора 12 остается постоянным и обеспечивается равенство нулю его среднего входнопо тока
С1э-Тн) -1иСТ-Г)-0,
где f - время открытого состояния
ключа
Т - период работы ключа 11. В результате подставки значениями имеем..
.
Таким образом, с помощью ключа 11 интегратора тока 12 и регулятора 15 измерение массы сведено к измерению отношения Г|т, что осуществляется с помощью генератора 13, делителя частоты 14, вентиля 16 и преобразователя 17 частоты в цифровой код.
Эталонный контур (подвижная система 3, датчик 8, регулятор 9, компенсационная катушка 4, буфер 10) фактически отделен от нагрузочного контура (подвижная система 1, датчик 6, регулятор 7, компенсационная катушка 2) интегратором тока 12, на входе которого поддерживается постоянное напряжение при работе модулятора 15,
Это исключает погрешность нелинейности весов, вызываемую пульсациями напряжения на выходе ключа 11 и, следовательно, тока в цепи эталонного контура. Исключена необходимость кoн денсатора емкости, включаемого параллельно компенсационной катушке 2,
ИзмерениеотношенияТ/Т осуществляется следующим образом.
Вентиль 16 управляется выходным сигналом модулятора 15 и пропускает импульсы генератора 13 в течение времени t на вход преобразователя 17, входные импульсы которого пересчитываются реверсивным счетчиком 18. Зна чение кода в счетчике 18 в конце цикла измерения соответствует массе измеряемого груза. Цикл измерения содержит несколько периодов работы модулятора 15 и определяется емкостью делителя частоты 19, вход которого соединен с выходом делителя частоты 14, Для учета постоянной нагрузки и веса тары производится два измерения. Первое измерение производится при нажатой кнопке Тара 24 после положения на грузоприемную чашку тары, вес которой надо вычесть из результата взвешивания. Значение кода, накопленного в счетчике 18, пе реписывается в регистр тари 20 после окончания цикла измерения передним фронтом импульса с выхода делителя частоты 19 через нажатую кнопку Тара 24, При взвешивании измеряемого груза, в начале цикла измерения, зад ним фронтом импульса с выхода делителя частоты 19 код из регистра 20 переписывается в счетчик 18, и последний включается в режим вычитания, При установке нуля в счетчике 18, де
тектор нуля 22 переключает его в режим суммирования. По переднему фронту импульса с выхода делителя частоты 19 код, накопленный в счетчике 18 и равный полному весу груза минус вес тары, переписывается в регистр результата 21 и индицируется индикатбром 23, После этого начинается новый цикл измерения.
Интегратор тока 12 представляет собой (фиг, 2) операционный усилител 27, охваченный отрицательной обратной связью по переменному току через конденсатор 28, Выходное напряжение интегратора 12 равно напряжению на конденсаторе 28, т,е, пропорционально интегралу входного тока и управляет скважностью выходного сигнала модулятора 15.
Электронный ключ 11 может быть выполнен на различных типах полупроводниковых приборов (например, на биполярных транзисторах, МОП-приборах) Существенное повышение точности достигается при применении ключа на двух диодах, К выходу буфера 10 диоды могут быть присоединены как оба катодами, так и оба анодами.
На фиг. 2 приведена схема соединения двух анодов диодов 25 и 26 с выходом буфера 10, На неинвертирующий вход (+) усилителя 27 подается напряжение с источника смещения 29. Уровень этого напряжения выбирается в соответствии с уровнем переключения вентиля 16 из включенного состояния в выключенное и обратно. Усилитель 27 поддерживает на инвертирующем входе (-) напряжение, равное напряжению источника смещения 29. При высоком уровне напряжения на выходе модулятора 15 диод 25 закрыт, и выходной ток буфера 10 протекает через диод 26 на вход интегратора 12. При низком уровне напряжения на выходе модулятора 15 диод 26.закрыт, и диод 25 открыт. Точность весов повышается за счет того, что переключение ключа 11 и вентиля 16 обеспечивается одновременно на обоих фронтах выходного импульса модулятора 15,
Недостатком весов с нагрузочной и эталонной подвижными системами является их конструктивная сложность Вызываемое этим увеличение погрешности , вносимой узлами подвеса подвижных систем, затрудняет достижение теоретической расчетной точности весов.
Для упрощения конструкции весов вместо эталонного контура (подвижная система 3, датчик положения 8, регу.лятор тока 9, компенсационная катушка 4), применен источник опорного тока 30, выход которого подключен ко входу буфера 10. Ток источника 30 .стабилен, и на индикаторе 23 отображается отношение тока катушки току источника 30, определяощее мас су измеряемого груза. Введение в предлагаемых весах интегратора тока и новых связей повышает точность весов при одновременном упрощении электронной схемы. В весах фактически реализовано разделение эталонного контура, вырабатывающего опорный ток, от нагрузочного (подвижная система, датчик положения регулятор тока, компенсационная катушка) и от цифровой части весов интегратором тока, поддерживающим на своем входе постоянное напряжение при работе широтно-импульсного модулятора. В результате устраняется пог решность нелинейности весов, вызываемая пульсациями напряжения на входе электронного ключа и, следовательно, тока в цепи эталонного контура. Исключается необходимый в известном устройстве ко.чденсатор большой емкости , включенный параллельно компен сационной катушке нагрузочной подвиж ной системы, и соответственно, исклю чается составляющая погрешности весов за счет его тока утечки и потерь на поляризацию. Применение операционного усилителя в интеграторе тока тюзволяет уменьшить величину емкости интегрирующего конденсатора, так как последний включен в обратную связь операционного усилителя, что эквивалентно умножению его величины на коэффициент усиления усилителя. Формула изобретения 1. Электронные цифровые весы, содержащие независимо подвешенные эталонную и нугрузочную системы с.компенсационными катушками, находящимися в воздушно зазоре магнитной системы, соединенные последовательно датчик положения, регулятор тока. компенсационную катушку эталонной подвижной системы, буфер и первый вход электронного ключа, соединенные между собой датчик положения и регулятор тока Нагрузочной системы, генератор, соединенный через делитель частоты с широтно-импульсным модулятором и первым входом преобразователя частоты в код, и. вентиль, один вход которого соединен с генератором, другой вход - с вторым входом электронного ключа и выходом широтно-импульсного модулятора, а выход вентиля подключен к второму входу преобразователя частоты в код, отличающиеся тем, что, с целью повышения точности измерения, в них введен интегратор тока, вход которого соединен с выходом электронного ключа и вторым выводом компенсационной катушки нагрузочной подвижной системы, первый вывод которой соединен с выходом регулятора тока нагрузочной подвижной системы, а выход интегратора тока Соединен с управляющим входом широтно-импульсного модулятора , 2. Весы по п. 1, о тли чаю щ и е с я тем, что электронный ключ выполнен в виде двух диодов, одноименные электроды которых соединены между собой и с выходом буфера, второй электрод первого диода соединен с выходом широтно-импульсного модулятора и входом вентиля, второй электрод второго диода соединен с вторым выводом компенсационной катушки нагрузочной подвижной системы и входом интегратора тока. Источники информации, принятые во внимание при экспертизе 1.Сахаров А,И. Весы в физико-химических исследованиях. М., Наука , 1968. с. 53-65. 2.Патент США № 3786883, кл. 177-210, опублик. 1976 (прототип).
