3151490
и 13, установленными на корпусе 1 на общей оси 14 и жестко соединенными между собой. Привод 8 П 7 выполнен в виде плунжерного гидроцилиндра 1.5 с пружиной 16, шарнирно связанных с корпусом 1, Барабан 12 связан с Т 5 груза 4, а барабан 13 - с Т 11 механизма перемещения 9 груза 4 в нерабочее положение, Т 5 и 11 намотаны щ на барабанах 12 и 13 в разные стороны, а П 7 установлен с возможностью поворота в вертикальной плоскости.
Г1ри перемещении элеватора вверх по свече груз 4 находится на П 7. Когда корпус 1 достигнет торца муфты, плунжерный гидроцилиндр 15 поворачи- вает П 7 и груз 4 соскальзывает с площадки и сматывает Т 5 с барабана 12. При этом Т 11 наматывается на барабан 13. При входе муфты трубы 23 в зону захватн ого органа 2 упор 21 нажимает на конечный выключатель 19 и элеватор захватывает муфту трубы 23. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический элеватор для бурильных труб | 1982 |
|
SU1094944A1 |
| Автоматический элеватор для бурильных труб | 1980 |
|
SU907217A1 |
| Автоматический элеватор для спуска и подъема бурильных труб | 1990 |
|
SU1774000A1 |
| Устройство для перемещения свечей бурильных труб | 1980 |
|
SU933936A1 |
| Устройство для установки свечей бурильных труб в стационарных буровых вышках | 1985 |
|
SU1404634A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЭЛЕВАТОР | 1967 |
|
SU194699A1 |
| Элеватор полуавтоматический | 1981 |
|
SU976013A1 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| АВТОМАТ ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙВ БУРЕНИИ | 1969 |
|
SU236377A1 |
Изобретение относится к бурению скважин. Цель изобретения - упрощение конструкции элеватора. Элеватор содержит корпус 1 с захватным органом 2 и механизмом его управления 3, выполненным в виде груза 4 с гибкой тягой (Т) 5, фиксатора 6 груза 4 в нерабочем положении в виде поворотного поддона (П) 7 с приводом 8 и механизма перемещения 9 груза 4 в нерабочее положение в виде плунжерного гидроцилиндра 10 с гибкой Т 11. Элеватор снабжен двумя барабанами 12 и 13, установленными на корпусе 1 на общей оси 14 и жестко соединенными между собой. Привод 8 П 7 выполнен в виде плунжерного гидроцилиндра 15 с пружиной 16, шарнирно связанных с корпусом 1. Барабан 12 связан с Т 5 груза 4, а барабан 13 - с Т 11 механизма перемещения 9 груза 4 в нерабочее положение, Т 5 и 11 намотаны на барабанах 12 и 13 в разные стороны, а П 7 установлен с возможностью поворота в вертикальной плоскости. При перемещении элеватора вверх по свече груз 4 находится на П 7. Когда корпус 1 достигнет торца муфты, плунжерный гидроцилиндр 15 поворачивает П 7 и груз 4 соскальзывает с площадки и сматывает Т 5 с барабана 12. При этом Т 11 наматывается на барабан 13. При входе муфты трубы 23 в зону захватного органа 2 упор 21 нажимает на конечный выключатель 19 и элеватор захватывает муфту трубы 23. 2 ил.
Изобретение относится к области бурения скважинка именно к устройствам для спуско-подъемных операций с бурильными трубами. .
Целью изобретения является упрощение конструкции элеватора„
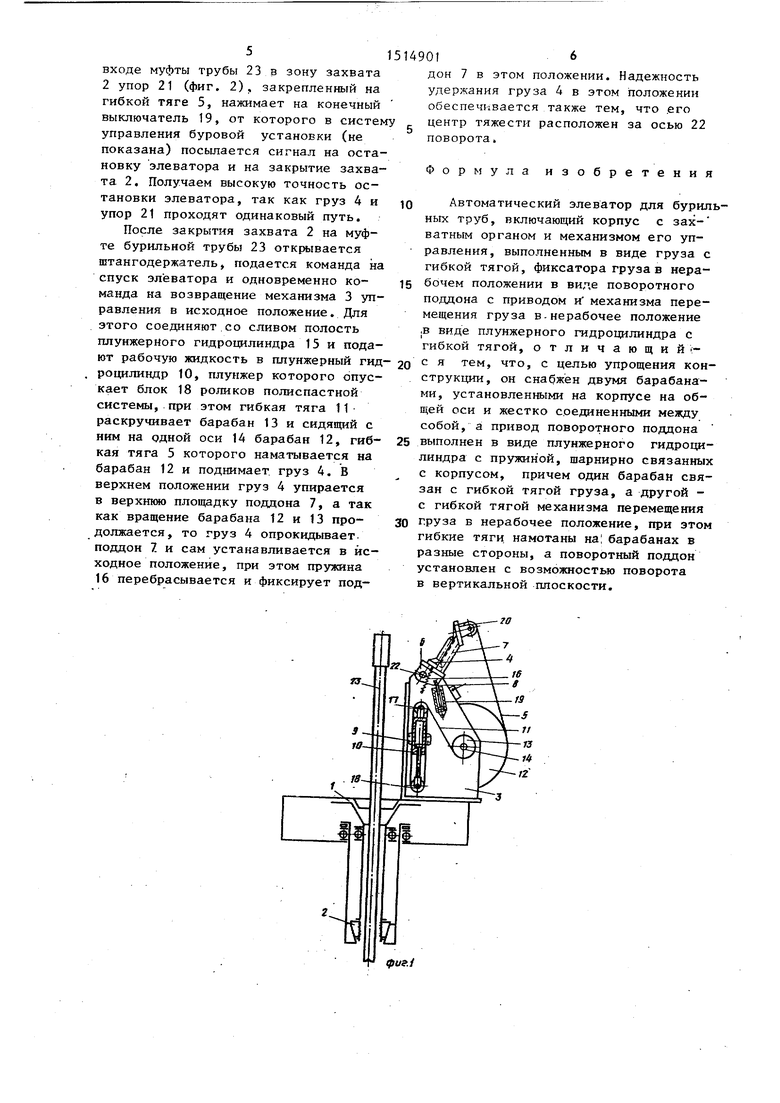
На фиг. 1 изображен элеватор в исходном положении, общий вид , на фиг. 2 - то же, при захвате трубы после остановки элеватора.
Элеватор содержит Kopnyd 1 с захватным органом 2 и механизмом 3 его управления, выполненным в виде груза
4с гибкой тягой 5, фиксатора 6 гру- за 4 в нерабочем положении в виде поворотного поддона 7 с приводом 8
и механизма 9 перемещения груза 4 в нерабочее положение в виде плунжерного гидроцилиндра 10 с гибкой тягой 11. Элеватор снабжен двумя барабанами 12 и 13, установленными на корпусе 1 на общей оси 14 и жестко соединенными между собой.
Привод 8 поворотного поддона 7 выполнен в виде плунжерного гидро- цилиндра 15 с пружиной 16, шарнирно связаннёгх с корпусом 1.
Барабан 12 связан с гибкой тягой
5груза 4, а барабан 13 - с гибкой тягой 11 механизма 9 перемещения груза 4 в нерабочее положение. Гибкие тяги 5 и 11 намотаны на барабанах
12 и 13 в разные стороны, а поворотный поддон 7 установлен с возможное- тью поворота в вертикальной плоскости ,
Механизм 9 перемещения имеет псли спастную систему в виде блоков роликов 17 и 18 и конечный выключатель 19, а поворотный поддон имеет ролик 20.
На гибкой тяге 5 установлен упор 21, контактирующий с конечным выклю
0
5
0
5
0
д
п
5
чателем 19, связанным с системой управления буровой установки (не показана).
Элеватор работает следующим образом.
В цикле спуска бурильной колонны элеватор передает ее штангодержателю (не показан). Одновременно подается на устье скважины следующая свеча и во время ее свинчивания с бурильной колонной (не показано) элеватор с открытым захватом 2 движется вверх по этой свече, при этом груз 4 находится на поворотном поддоне 7 и удерживается в этом положении собственным весом (его центр тяжести находится за осью 22 поворота) и пружиной 16 (фиг. 1).
В момент, когда опорная плоскость корпуса 1 элеватора достигает торца муфты верхней трубы 23 свинчиваемой свечи, подается команда на включение предостановочной скорости элеватора и одновременно команда на подачу ра-, бочей жидкости в плунжерный гндроци- риндр 15, плунжер которого поворачи-, вает поворотный поддон 7, а пружина 16 удерживает его в опрокинутом положении. Груз 4 соскальзывает с пЛо- щадки поворотного поддона 7 и, сматывая гибкую тягу 5 с барабана 12, подает на торец муфты бурильной трубы 23, при этом гибкая тяга 11 наматывается на барабан 13 и через полиспаст- ную систему блоков 17 и 18 утапливает плунжер гидроцилиндра 10, преодолевая давление подпора на сливе этого гидроцилиндра, благодаря чему несколько замедляется скорость падения груза 4. При дальнейшем движении элеватора вверх груз 4 остается на торце муфты трубы 23 и продолжает раскручивать барабаны 12 и 13. При
входе муфты трубы 23 в зону захвата 2 упор 21 (фиг. 2), закрепленный на гибкой тяге 5, нажимает на конечный выключатель 19, от которого в систем управления буровой установки (не показана) посылается сигнал на остановку элеватора и на закрытие захвата 2. Получаем высокую точность остановки элеватора, так как груз 4 и упор 21 проходят одинаковый путь.
После закрытия захвата 2 на муфте бурильной трубы 23 открывается штангодержатель, подается команда на спуск эл еватора и одновременно команда на возвращение механизма 3 управления в исходное положение. Для этого соединяют со сливом полость плунжерного гидроцилиндра 15 и подают рабочую жидкость в плунжерный гид- 20 тем, что, с целью упрощения кон- роцилиндр 10, плунжер которого опускает блок 18 роликов полиспастной системы, при этом гибкая тяга 11- раскручивает барабан 13 и сидящий с ним на одной оси 14 барабан 12, гиб- 25 кая тяга 5 которого наматывается на барабан 12 и поднимает, груз 4. В верхнем положении груз 4 упирается в верхнюю площадку поддона 7, а так как вращение барабана 12 и 13 про- зо должается, то груз 4 опрокидывает, поддон 7 и сам устанавливается в исходное положение, при этом пружина 16 перебрасывается и фиксирует подструкции, он снабжён двумя барабанами, установленными на корпусе на общей оси и жестко соединенными между собой, а привод поворотного поддона выполнен в виде плунжерного гидроцилиндра с пружиной, шарнирно связанных с корпусом, причем один барабан связан с гибкой тягой груза, а другой - с гибкой тягой механизма перемещения груза в нерабочее положение, при этом гибкие тяги, намотаны на барабанах в разные стороны, а поворотный поддон установлен с возможностью поворота в вертикальной плоскости.
дон 7 в этом положении. Надежность удержания груза 4 в этом положении обеспечивается также тем, что его центр тяжести расположен за осью 22 поворота.
Формула изобретения
Автоматический элеватор для бурильных труб, включающий корпус с зах- ватным органом и механизмом его уп- равления, выполненным в виде груза с гибкой тягой, фиксатора груза в нерабочем положении в ви,е поворотного поддона с приводом и механизма перемещения груза в-нерабочее положение |В виде плунжерного гидроцилиндра с гибкой тягой, отличающий тем, что, с целью упрощения кон-
струкции, он снабжён двумя барабанами, установленными на корпусе на общей оси и жестко соединенными между собой, а привод поворотного поддона выполнен в виде плунжерного гидроцилиндра с пружиной, шарнирно связанных с корпусом, причем один барабан связан с гибкой тягой груза, а другой - с гибкой тягой механизма перемещения груза в нерабочее положение, при этом гибкие тяги, намотаны на барабанах в разные стороны, а поворотный поддон установлен с возможностью поворота в вертикальной плоскости.
| Автоматический элеватор для бурильных труб | 1980 |
|
SU907217A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Iff | |||
