1
;о 4;:
tik
Изобретение относится к бурению скважин, а именно к устройствам для спускоподъемных операций с бурильным трубами.
Известен автоматический элеватор для бурильных труб, содержащий корпус с захватным органом и механизмом его управления f1J.
Недостатком его является сложная конструкция механизма управления захватньи органом, что снижает надежность его работы.
Наиболее бпизким техническим решением к изобретению является автоматический элеватор для бурильных труб, включакщий корпус с захватным органом и механизмом его управления , вьшолненным в виде груза с гибкой тягой и фиксатора .груза в нерабочем положении, вьшолненного в виде поворотного рычага с приводом Г2.
Недостатком известного устройства является то, что в процессе работы происходит заклинка груза, а противовес обеспечивает приведение механизма управления в рабочее положение только при упоре противовеса в неподвижное основание, что снижает надежность работы устройства в целом.
Целью изобретения является повышение надежности работы механизма управления за счет обеспечения возможности приведения механизма управления в рабочее положение при любом положении элеватора.
Указанная цель достигается тем, что в автоматическом элеваторе для бурильных труб, включающем корпус с захватным органом и механизмом его управления, выполненным в виде груза с гибкой тягой и фиксатора груза в нерабочем положении, выполненного в виде поворотного рычага с приводом, механизм управления снабжен приводом перемещения груза в нерабочее положение, выполненным в виде плунжерного гидроцилиндра, установленного с возможностью взаимодействия с грузом посредством полиспастной системы с противовесом и дополнительным рычагом с направляющей втулкой для груза, установленным на общей оси с основным рычагом причем основной и дополнительный рычаги подпружинены меладу собой.
Такое вьшолнение устройства обеспечивает возможность приведения механизма управления в рабочее положение при любом положении элеватора
что значительно повышает надежность работыустройства в целом.
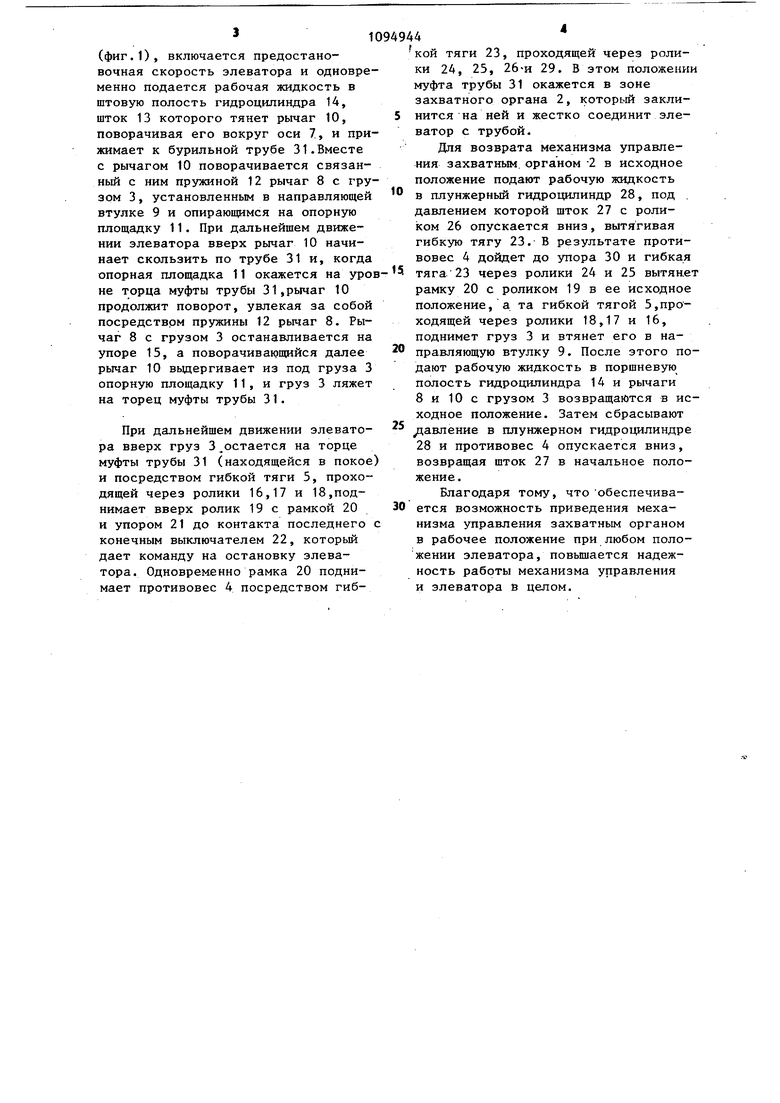
На фиг.1 изображено предпагаемое устройство в исходном положении;
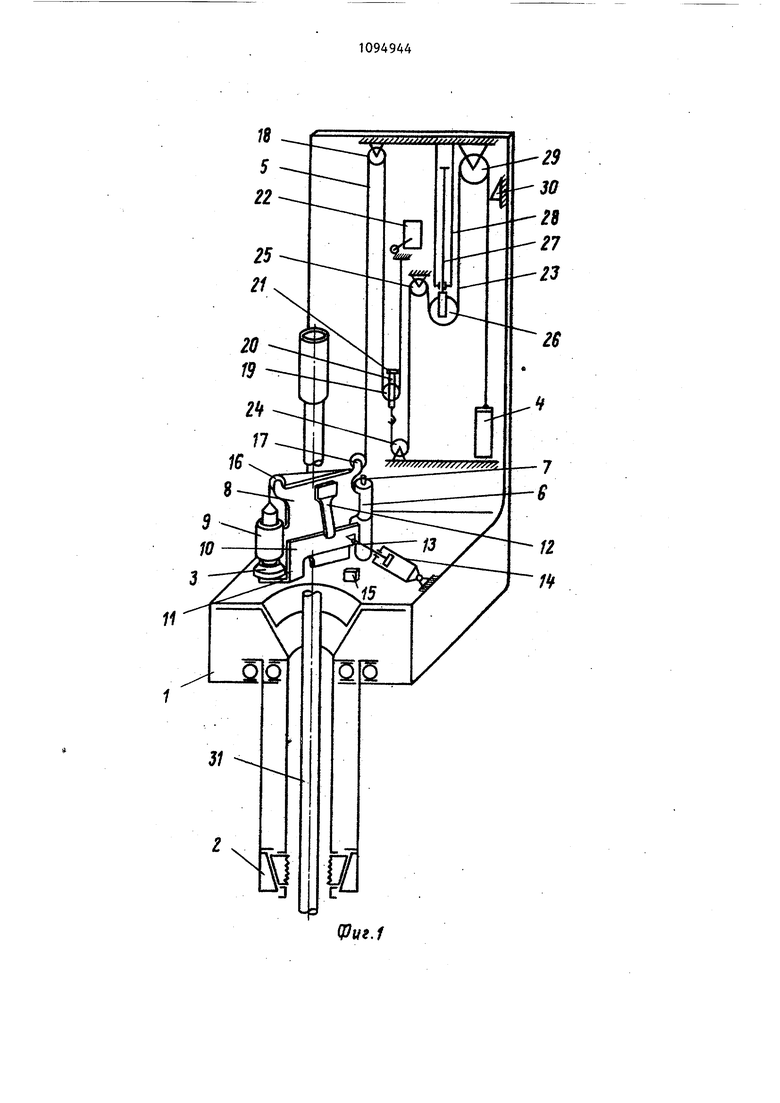
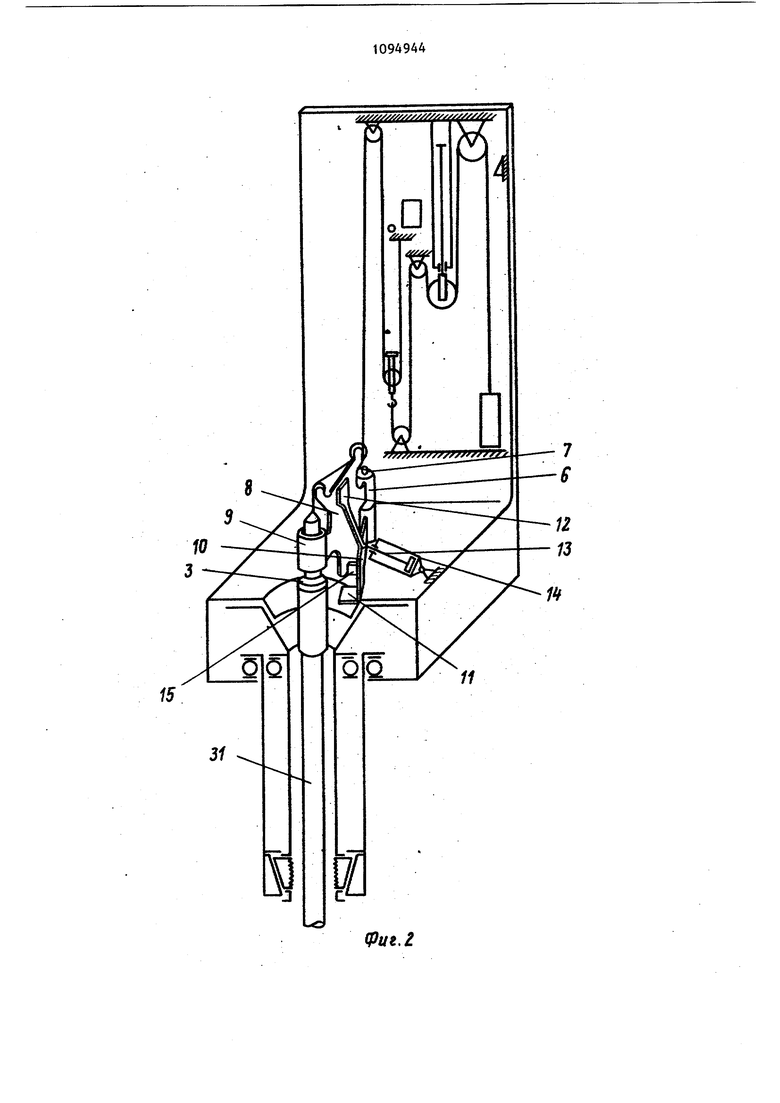
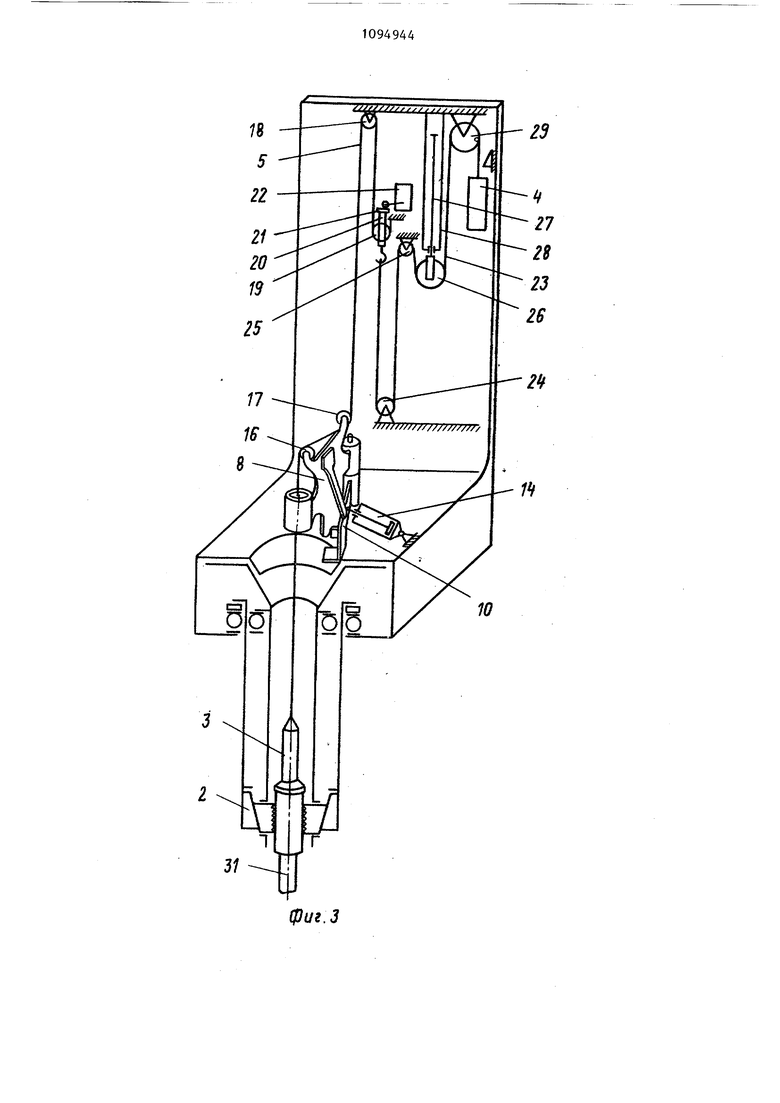
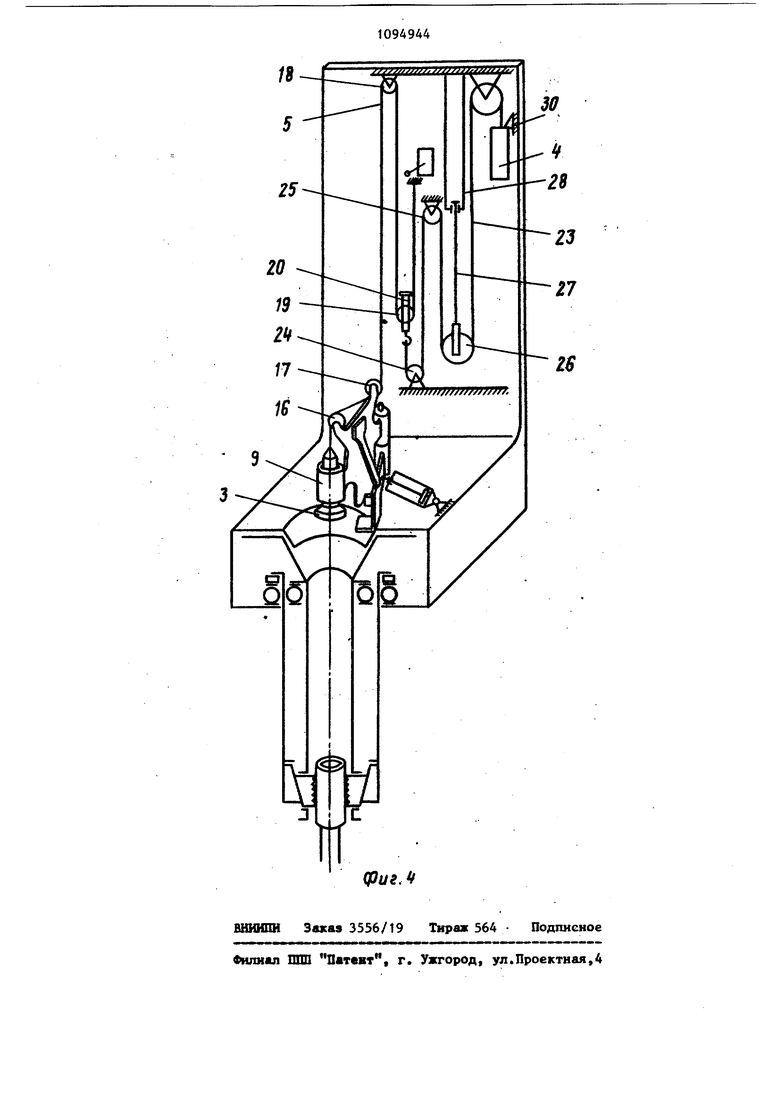
на фиг.2 - то же, после установки груза на бурильную трубу; на фиг.З то же, при захеате бурильных труб} на фиг.4 - возвращение груза в исходное положение.
Элеватор состоит из корпуса 1 с захватнь М органом 2 и механизмом управления захватным органом, выполненным в виде груза 3 с противовесом 4, связанных между собой гибкой тягой 5 и фиксатора 6 груза 3 в нерабочем положении.
Фиксатор 6 расположен на оси 7 корпуса 1 с возможностью поворота и состоит из рычага 8 с направляющей
втулкой 9 и рычага ТО с опорной площадкой 11. Рычаг 10 прижат к рычагу 8 пружиной 12 и шарнирно соединен со щтоком 13 гидроцилиндра 14, шарнирно соединенного с корпусом 1. На корпусе 1 установлен
упор 15 для ограничения поворота рычага 8.
В исходном положении груз 3 расположен в направляющей втулке 9 и
установлен на опорную площадку 11, а гибкой тягой 5 через ролики 16 и 17 рычага 8, ролики 18 и 19 соединены с корпусом 1. Ролик 19 установлен в рамке 20, которая имеет упор 21 для контакта с конечным вьпслючателем 22. Рамка 20 соединена гибкой тягой 23 с противовесом 4 через ролики 24 и 25, ролик 26, укрепленный на штоке 27 плунжерного гидроцилиндра 28, и ролик 29. Гибкие тяги 5 и 23 и ролики 16,17,18, 19,24,25,26 и 29 входят в состав полиспастной системы. На корпусе 1 установлен упор 30 для противовеса 4. Элеватор предназначен для работы с бурильной колонной, состоящей из труб 31.
Элеватор работает следующим образом.
В ИСХОДНО14 положении элеватор с
открытым захватным органом 2 опущен в нижнее положение. Бурильная колонна удерживается штангодержателем (не показан). К верхней муфте колонны привинчена труба 31.
Подают команду на перемещение элеватора вверх. При его перемещении, в положении, когда фиксатор 6 находится ниже торца муфты трубы 31 (фиг.1), включается предостановочная скорость элеватора и одновре менно подается рабочая жидкость в штовую полость гидроцилиндра 14, шток 13 которого тянет рычаг 10, поворачивая его вокруг оси 7, и при жимает к бурильной трубе 31.Вместе с рычагом 10 поворачивается связанный с ним пружиной 12 рычаг 8 с гру зом 3, установленным в направляющей втулке 9 и опирающимся на опорную площадку 11. При дальнейшем движении элеватора вверх рычаг 10 начинает скользить по трубе 31 и, когда опорная площадка 11 окажется на уро не торца муфты трубы 31,рычаг 10 продолжит поворот, увлекая за собой посредством пружины 12 рьиаг 8. Рычаг 8 с грузом 3 останавливается на упоре 15, а поворачивающийся далее рычаг 10 вьщергивает из под груза 3 опорную площадку 11, и груз 3 ляжет на торец муфты трубы 31. При дальнейшем движении элеватора вверх груз 3 остается на торце муфты трубы 31 (находящейся в покое и посредством гибкой тяги 5, проходящей через ролики 16,17 и 18,поднимает вверх ролик 19 с рамкор 20 и упором 21 до контакта последнего конечным выключателем 22, который дает команду на остановку элеватора. Одновременно рамка 20 поднимает противовес 4 посредством гиб14 кой тяги 23, проходящей через ролики 24, 25, 26-и 29, В этом положении муфта трубы 31 окажется в зоне захватного органа 2, который заклинится на ней и жестко соединит элеватор с трубой. Для возврата механизма управления захватным органом -2 в исходное положение подают рабочую жидкость в плунжерный гидроцилиндр 28, под . давлением которой шток 27 с роликом 26 опускается вниз, вытягивая гибкую тягу 23.- в результате противовес 4 дойдет до упора 30 и гибкая тяга23 через ролики 24 и 25 вытянет рамку 20 с роликом 19 в ее исходное положение, а та гибкой тягой 5,проходящей через ролики 18,17 и 16, поднимет груз 3 и втянет его в направляющую втулку 9. После этого подают рабочую жидкость в поршневую полость гидроцилиндра 14 и рычаги 8 и 10 с грузом 3 возвращаются в исходное положение. Затем сбрасывают давление в плунжерном гидроцилиндре 28 и противовес 4 опускается вниз, возвращая шток 27 в начальное положение. Благодаря тому, что обеспечивается возможность приведения механизма управления захватньм органом в рабочее положение при любом положении элеватора, повьш1ается надежность работы механизма управления и элеватора в цепом.
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический элеватор для бурильных труб | 1987 |
|
SU1514901A1 |
| Автоматический элеватор для бурильных труб | 1980 |
|
SU907217A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| Автоматический элеватор для спуска и подъема бурильных труб | 1990 |
|
SU1774000A1 |
| Устройство для установки свечей бурильных труб в стационарных буровых вышках | 1985 |
|
SU1404634A1 |
| Устройство для спуско-подъема бурильных труб | 1981 |
|
SU977738A1 |
| Устройство для перемещения свечей бурильных труб | 1980 |
|
SU933936A1 |
| Элеватор полуавтоматический для бурильных труб | 1985 |
|
SU1305298A1 |
| Ключ для свинчивания-развинчивания замковых соединений | 1987 |
|
SU1498904A1 |
АВТОМАТИЧЕСКИЙ ЭЛЕВАТОР ДЛЯ БУРИЛЬНЫХ ТРУБ, включающий корпус с захватным органом и механизмом его управления, выполненным в виде груза с гибкой тягой и фиксатора груза в нерабочем положении, выполненного в виде поворотного рычага с приводом, отл и ч а ю щ ий с я тем, что, с целью повышения надежности работы механизма управления за счет обеспечения возможности приведения механизма управления в рабочее положение при любом положении элеватора, механизм зшравления снабжен приводом перемещения груза в нерабочее положение, выполненным в виде плунжерного гидроцилиндра, установленного с возможностью взаимодействия с грузом посредством полиспастной системы с противовесом и дополнительным рычагом с направляющей втулкой для груза, установленным на общей оси с основным рычагом, причем основной и дополнительный рычаги подпружинены между собой.
(риг, I
31
фиг.З
1
10
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматический элеватор для бурильных труб | 1980 |
|
SU907217A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
