(21)4061485/24-07
(22)14.03.86
(46) 15.10.89. Бюл. № 38
(71)Казанский авиационный институт им. А.Н. Туполева
(72)А.Ю. Афанасьев и З.А. Насыров (53) 621.313.282(088.8)
(56) Авторское свидетельство СССР № 1410215, кл. Н 02 К 41/03, 1985.
Авторское свидетельство СССР № 1464265, кл. Н 02 К 41/02, 1985.
(54) ЭЛЕКТРОДВИГАТЕЛЬ (57) Изобретение относится к электротехнике и может быть использовано в прецизионных следящих системах и системах программного движения. Цель изобретения состоит в расширении функциональных возможностей путем обеспечения малых частот вращения выходного вала и уменьшении потребляемой мощности. Электродвигатель имеет расположенные коаксиально внеш
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель | 1985 |
|
SU1410215A1 |
| Бесконтактный магнитный редуктор | 1986 |
|
SU1406698A1 |
| Стабилизированная гибридная аксиальная электрическая машина-генератор | 2024 |
|
RU2834276C1 |
| Гибридная аксиальная электрическая машина-генератор | 2024 |
|
RU2831605C1 |
| Линейный электродвигатель | 1987 |
|
SU1515278A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| Бесконтактный регулируемый синхронный генератор | 1982 |
|
SU1123081A1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
| Электродвигатель | 1985 |
|
SU1464265A2 |
| Шаговый электродвигатель | 1987 |
|
SU1647793A1 |
Изобретение относится к электротехнике и может быть использовано в прецизионных следящих системах и системах программного движения. Цель изобретения состоит в расширении функциональных возможностей путем обеспечения малых частот вращения выходного вала и уменьшении потребляемой мощности. Электродвигатель имеет расположенные коаксиально внешний и внутренний секторы 1 и 2, шихтованный магнитопровод 3 якоря, обмотку 4 якоря, ярма 5 и 6 статора, кольцевые магниты 7 и 8, внутренний вал 13, выходной вал 14, внутренние роторы 15, внешние роторы 16 и элемент 19 поступательного перемещения. Внутренние роторы 15 имеют форму полых цилиндров с когтеобразными выступами. На внешней поверхности внутренних роторов 15 и на внутренней поверхности элемента 19 выполнена винтовая резьба с одинаковым шагом и ходом, на внешней поверхности элемента 19 и внутренней поверхности внешних роторов 16 выполнены продольные канавки под малым углом к образующей цилиндра. При питании обмотки 4 якоря возникает вращающееся магнитное поле, приводящее во вращение роторы 15. При этом под действием нового усилия магнитного тяжения элемент 19 перемещается поступательно, а внешние роторы 16 под действием тангенциальных усилий магнитного тяжения весьма медленно вращаются, в результате чего обеспечивается большой коэффициент редукции. 1 ил.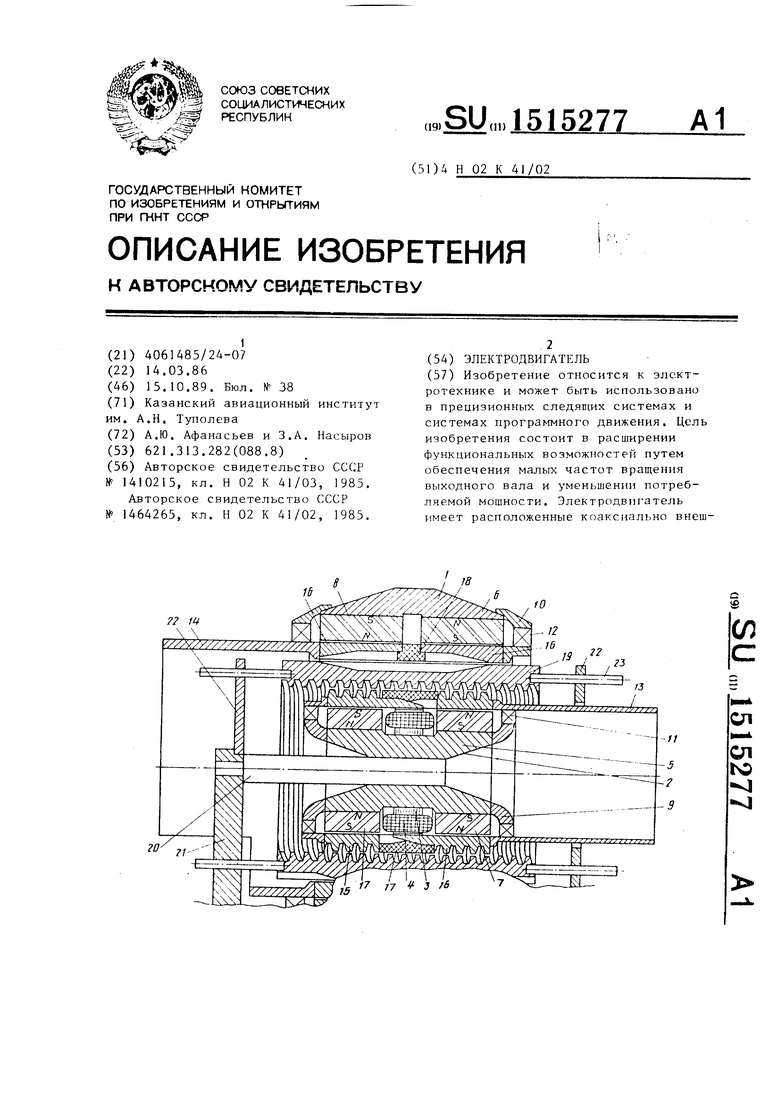
10
с
(Л
72
23
гз
ел СП
ГчЭ
31515
11И11 и ниутренний секторы 1 и 2, ших- гонлнны магнитопровод 3 якоря, обмотку 4 якоря, ярма 5 и 6 статора, кольцевые магниты 7 и 8, внутренний вал 13, выходной вал 14, внутренние роторы 15, внешние роторы 16 и элемент 19 поступательного перемещения. Внутренние роторы 15 имеют форму полых цилиндров с когтеобразными вы- ступами. На внешней поверхности внутренних роторов 15 и на внутренней поверхности элемента 19 выполнена винтовая резьба с одинаковым шагом и ходом, на внешней поверхности элемента
Изобретение относится к электротехнике, а именно к исполнительным электродвигателям вращательного и поступательного движения, и может нати применение в прецизионных следя- щих системах и системах программного движения.
Цель изобретения - расширение функциональных возможностей путем обеспечения малых частот вращения выходного вала и уменьшения по.треб- ляемой мощности.
На чертеже показана конструкция электродвигателя.
Электродвигатель содержит распо- ложенные коаксиально внешний и внутренний секторы 1 и 2. Он имеет шихтованный магнитопровод 3 якоря, обмотку 4 якоря, ярма 5 и 6 статора, кольцевые постоянные магниты 7 и 8, подшипниковые щиты 9 и 10, подшипники 1.1 и 12, рнутренний вал 13, выходной вал 14, внутренние роторы 15, внешние роторы 16, немагнитную втулк 17 внутренних роторов, немагнитную втулку 18 внешних роторов, элемент поступательного перемещения 19, цилиндрическую опору 20, кронштейн 21, щиты 22, стержни 23.
Внутренние постоянные магниты 7 намагничены радиально и противоположно, внешние постоянные магниты 8 намагничены аналогично. Между ними и роторами 15 и 16 имеются малые паразитные зазоры. Немагнитные втул- ки 17 и 18 соединяют роторы 15 и 16. Внутренние роторы 15 имеют форму палых цилиндров с когтеобразными выступами, обращенными к магнитопрово
19 и гзпутренне 11огзерхнос1и внешних роторов 16 ньпюлпены предельные канавки под малым углом к образующей цилиндра. При питании обмотки 4 якоря возникает вращающееся магнитное поле, приводящее во вращение роторы 15. При этом под действием нового усилия магнитного тяжения элемент 19 перемещается поступательно, а внешние роторы 16 под действием тангенциальных усидий магнитного тяжения весьма медленно вращаются, в результате чего обеспечивается большой коэффициент редукции. 1 ил.
5
0
Q
0
ду 3 якоря и образующими чередующиеся разноименные полюсы. Между роторами 15 и 16 и элементом поступательного перемещения 19 имеются малые рабочие воздушные зазоры, обеспечивающие бесконтактность хода. Элемент
19имеет на частях торцовых стержни 23, скользящие в отверстиях, выполненных в щитах 22. Правый щит 22 закреплен на общем основании, а левый - на кронштейне 2, проходящем в вы- емке вала 14. Цилиндрическая опора
20крепится консольно на кронштейне 20, который установлен на общем ос-. новании. На нем же крепятся подшипниковые щиты 10. Кронштейн 21 не препятствует вращению вала 14, имеющему малый угол поворота.
На внешней поверхности внутренних роторов и на внутренней поверхности элемента 19 поступательного перемещения выполнена винтовая резьба с одинаковым шагом и ходом, на внешней поверхности элемента 19 поступательного перемещения и внутренней поверхности внешних ррторов 16 вьшолнены продольные канавки под малым углом/36 10 к образующей цилиндра.
Большая часть магнитного потока постоянных магнитов 7 и 8 замыкается по пути: постоянный магнит 7-ротор 15-элемент 19 поступательного пере- мещения-ротор 16-постоянный магнит 8- ярмо 6 и далее по аналогичному пути до ярма 5 статора.
Часть магнитного потока постоян- ных магнитов 7 и 6 соответственно замыкается по пути: постоянный магнит 7-ротор 15-когтеобрааные полюсы маr inTiuiрот 1Д нкори-ирмп 3 i; i;i - тора и пост (uiiiiibiii магнит 8-poiop 16- элемеит 19 ппступатсльного псремсик-- ния и далее по аналогичному пути до ярма 6.
Электродвигатель работает следующим образом.
При питании обмотки 4 якоря многофазной системо напряжений вогэникает вращающееся магнитное поле, приводящее во вращение роторы 15 с определенной частотой. При этом резьба ротора 15 смещается в осевом направлении относительно резьбы элемента 19 поступательного перемещения, возникает осевое усилие, под действием которого элемент 19 поступательного перемещения перемещается так, что магнитная проводимость между ними близка к максимальной.
Продольные канавки элемента 19 поступательного перемещения смещаются в тангенциальном направлении относительно продольных канавок внешних роторов 16, при этом возникают тангенциальные усилия, под действием которых внешние роторы 16 весьма медленно вращаются так, что магнитная проводимость меходу ними близка к максимальной, т.е. происходит бесконтакное преобразование поступательного движения элемента 19 во вращательное движен е роторов 16,
При повороте роторов 15 на один о борот элемент 19 поступательного перемещения перемещается на один шаг резьбы h, при повороте роторов 15 на угол о смещение элемента 19 поступательного перемещения составит Ьс//27Г и при необходимости может быть весьма малым. При этом продольные канавки на внешней поверхности элемента 19 поступательного перемещения смещаются в тангенциальном направлении на величину
hal ,,, g .ft . )
Внешний ротор 16 повернется на угол hoi
2TiR
tg Д
(2)
т,е, коэффициент редукции составляет
llL h-tg/5
(3)
где h - шаг
о( - угол поворота внутреннего
ротора 15; R -. радиус внешнего ротора 16;
10
://и
р, H-iK/ioua прсдп;11. ка.ч. к ofipa- уняцрй цилипд : ; - угол порсчрота BHf4iiiiorr JUI-I-DРа I 6.
Например ,05 рад, мм, мм,
Благодаря большому коэффициенту редукции момент, действующий на рзнут- ренние роторь, мал, следоБательно малы потери мощности в обмотке якоря, 15 что- Повышает энерг етические показатели. I
Таким образом, благодаря выполнению продольных канавок на внутренней 20 поверхности внешних jioropoB и на внешней поверхности элемента поступательного. переме|;1е,ния подучен электродвигатель с pacmHpeHHbiNiH функциональными возможностями и ПОВЬ 111еНН)1МИ
25 энергетическими показателями.
Формула изобретения
Электродвигатель, содержащий расположенные коаксиально внешний и внутренний статоры с устройствa и для возбужде}шя магнит{1ого потока на постоянных магнитах в виде полных цилиндров и ярмами, два внешних ротора с выходным валом и два внутренних ротора в виде полых ферромагнитных цилиндров и ферромагнитный элемент поступательного неремещеник в виде полого цилиндра, расположенныГ: коаксиально между внеш1н;м11 и внутре {ними роторами, на внешней поверхности ярма внутреннего статора между магнитами установлен шихтованнь магнитопровод якоря с обмоткой, внутренние роторы выполнены с KorTeo6pa3HFjiMH зубцами, обращенными к магнитопроводу якоря, и соединены друг с другом посредством втулки нз немагнитного материала, на внyтpeF нeй поверхности элемента поступательного перемещения и на внешней поверхности внутренних роторов выполнена винтовая резьба с оди- наковым шагом и ходом, постоянные магниты, роторы и элемент поступательного перемещения разделены зазо30
35
40
45
50
55
рами,
отличающийся
тем.
что, с целью расширения функциональных возможностей путем обеспечения малых частот вращения выходного вала
1515277
и уменьшения потребляемой мощности,полнены канавки с уг-шм паклоил
на внутркнней тюнсрхности внешнихiio к (брачуюшим цилиндров роторон
роторов и на внешней понерхности эле- элемента поступательимго неремещемента поступательного перемещения вы- ния.