1
(21)4158600/24-07
(22)10.12.86
(46) 15.10.89. Бюл. № 38
(71)Всесоюзньш научно-исследовательский, проектно-конструкторски и технологический институт электровозостроения
(72)А.В.Беляев, С.А.Крамсков, С.П.Микуляк и М.В.Нанрасник
(53)621.316.727(088.8)
(56)Авторское свидетельство СССР № 884068, кл. Н 02 К 7/04, 1979.
Электровоз ВЛ80Р. Руководство по эксплуатации, М., Транспорт, 1985, с. 64-67.
(54)СПОСОБ УПРАВЛЕНИЯ МЮГОЗОННЫМ ВЫПРЯМИТЕЛЕМ
(57)Изобретение относится к электротехнике и может быть использовано для управления вентильными преобразователями электроподвижного состава переменного тока Цель изобретения - повышение надежности работы и точности управления. Способ состоит в
отпирания, подают плеча предыдумей з дего контуру комму напряжением, импул относительно первы KOMNtyTamm в конту жением, подают на щей зоны игшульсы отпирания. Величин при этом вычисляют Xl
/Ai
arccos (cos ot o г,-
и rn
личина заданного у среднее значение и ., - максимальное напряжения, X - в сопротивления кон достк кепии фаяо1 сов фаяы задержан сы с 1)егулируе ым задержанные не под плеч предыдущей и подают с пирания. При этом тивное сопр :тивле
том, что подают :ia вентили плеча пре- ,j формуле Х
.
дыдущей зоны, соответствующего контуру коммутации с большим напряжением, импульсы управления с заданн1 1м углом
среднее значение 3 ил.
отпирания, подают на вентили другого плеча предыдумей зоны, соответствурп- дего контуру коммутании с меньшим напряжением, импульсы, задержанные относительно первых на величину угла KOMNtyTamm в контуре с большим напряжением, подают на вентили последующей зоны игшульсы с регул1фуемым углом отпирания. Величину угла коммутации при этом вычисляют по Xld,
/AidN/
arccos (cos ot o г,- )
и rn
{, - леличина заданного угла отпирания; 1 ц среднее значение выпрямленнох о тока; и ., - максимальное ззшчсние питаюпшлю напряжения, X - величина индуктивного сопротивления контура коммутации. При достк кепии фаяо1 регулируемых импульсов фаяы задержанных иьгпульсов импульсы с 1)егулируе ым углом отпиран1тя н задержанные не подают, а на вентили плеч предыдущей и последуюп е зон подают с заданным углом отпирания. При этом определяют индуктивное сопр :тивление контура комьгутаj jj,j формуле Х
. 2Um-ffUcp
где и ср среднее значение питающего напряжения. 3 ил.
1
сл
ел к со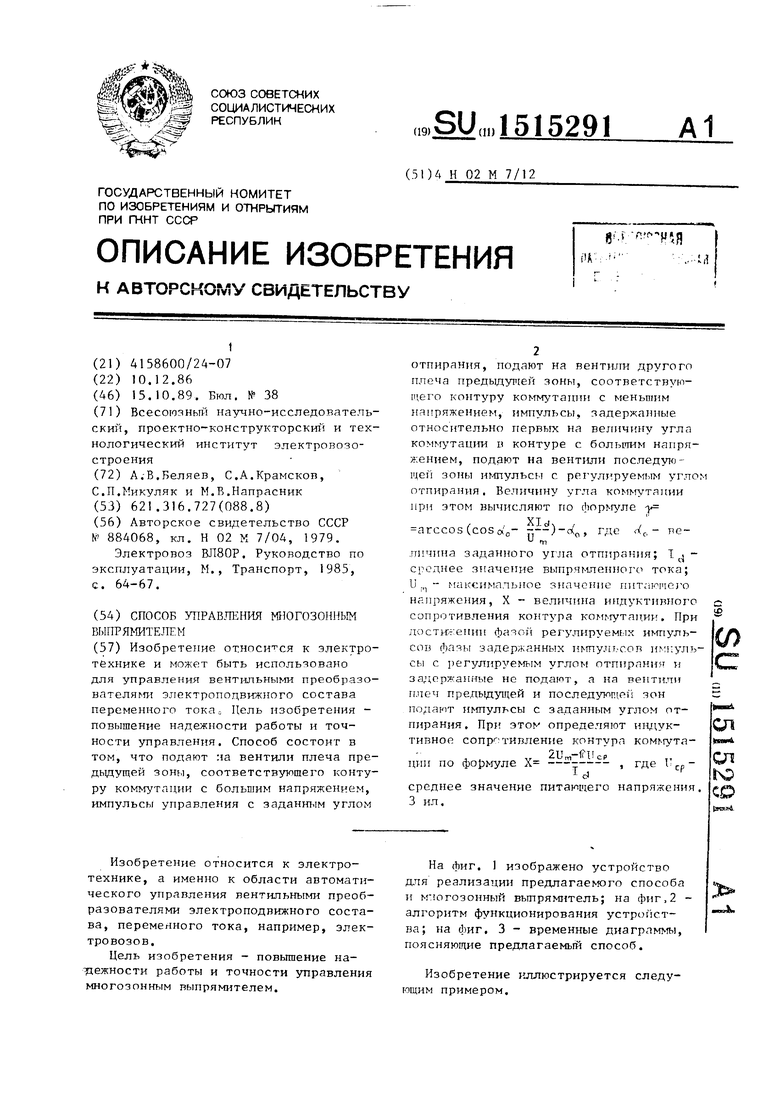
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления группами параллельных вентильных преобразователей | 1986 |
|
SU1427524A1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| Способ управления однофазным инвертором | 1985 |
|
SU1365306A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОЗОННЫМ ПРЕОБРАЗОВАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2168839C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАВИСИМЫМ ИНВЕРТОРОМ ОДНОФАЗНОГО ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2561068C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА И КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ НА ТОКОПРИЕМНИКЕ ПРИ ЕГО РАБОТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467892C1 |
| Способ управления многозонным преобразователем переменного тока | 1986 |
|
SU1363403A1 |
| Способ управления вентильными преобразователями электроподвижного состава переменного тока | 1976 |
|
SU954270A1 |
| Способ управления вентальными преобразователями электроподвижного состава переменного тока | 1974 |
|
SU515674A1 |
Изобретение относится к электротехнике и может быть использовано для управления вентильными преобразователями электроподвижного состава переменного тока. Цель изобретения - повышение надежности работы и точности управления. Способ состоит в том, что подают на вентили плеча предыдущей зоны, соответствующего контуру коммутации с большим напряжением, импульсы управления с заданным углом отпирания, подают на вентили другого плеча предыдущей зоны, соответствующего контуру коммутации с меньшим напряжением, импульсы, задержанные относительно первых на величину угла коммутации в контуре с большим напряжением, подают на вентили последующей зоны импульсы с регулируемым углом отпирания. Величину угла коммутации при этом вычисляют по формуле γ=ARCCOS(COSΑ0 - XID/UM)-Α0, где α0 - величина заданного угла отпирания, ID - среднее значение выпрямленного тока, UM - максимальное значение питающего напряжения, X - величина индуктивного сопротивления контура коммутации. При достижении фазой регулируемых импульсов фазы задержанных импульсов импульсы с регулируемым углом отпирания и задержанные не подают, а на вентили плеч предыдущей и последующей зон подают импульсы с заданным углом отпирания. При этом определяют индуктивное сопротивление контура коммутации по формуле X=2UM-φUср/ID, где Uср - среднее значение питающего напряжения. 3 ил.
Изобретение относится к электротехнике, а именно к области автоматического управления вентильными преобразователями электроподвижного состава, переменного тока, например, электровозов.
Цель изобретения - повышение на- тхежности работы и точности управления многозонным выпрямителем.
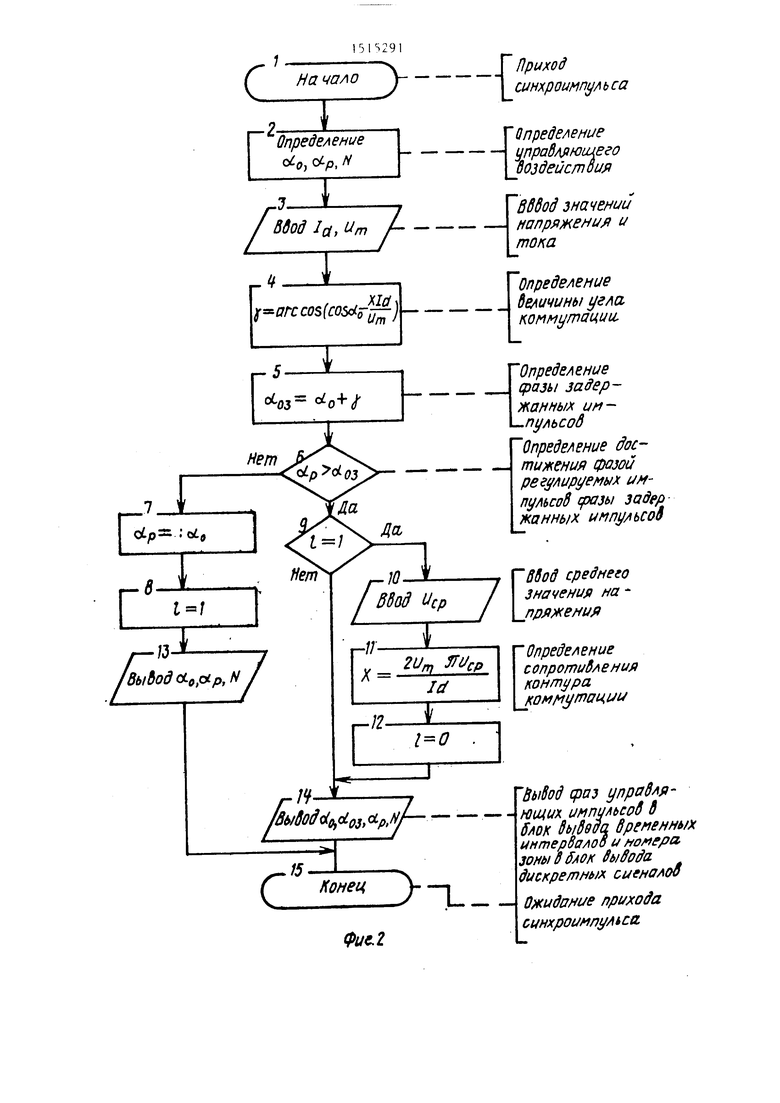
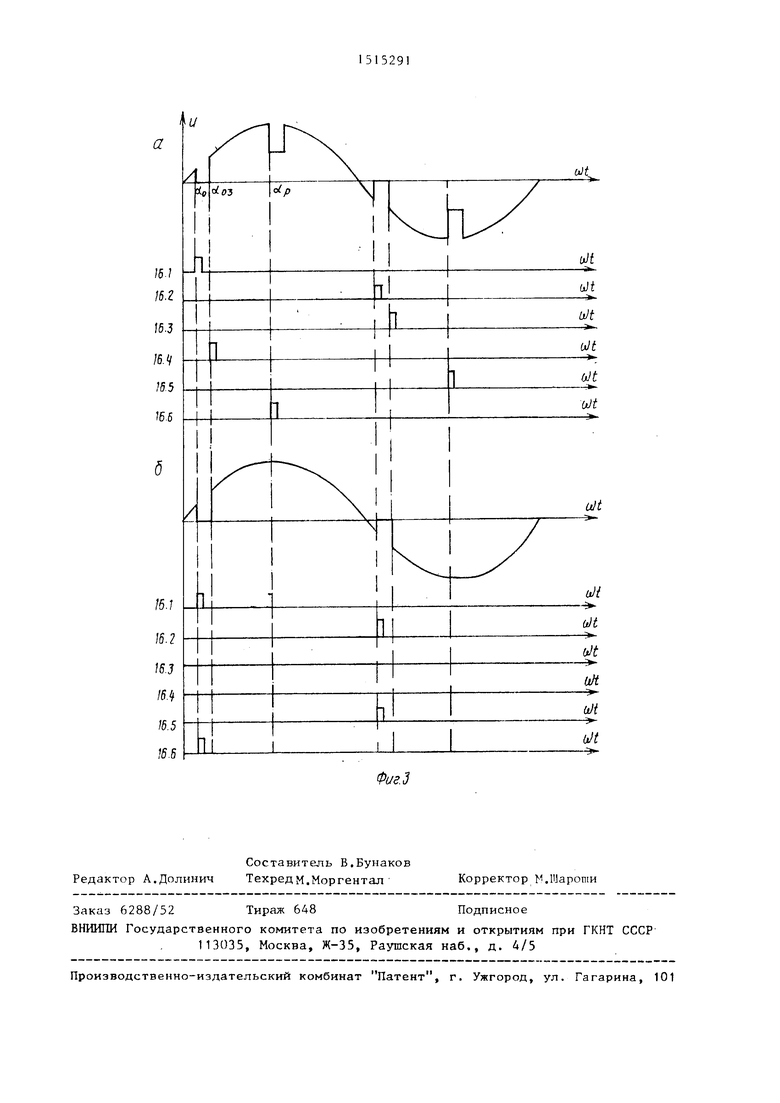
Ца фиг. 1 изображено устройство для реализации пpeдлaгae югo способа и м:1огозонный вьшрямитель; на фиг,2 - алгоритм функционирования устройства; на фиг. 3 - временные диаграммы, поясняющие предлагаемый способ.
Изобретение иллюстрируется следующим примером.
315 I
Уногозонньш выпрямитель I, подключенные к секционированному трансформатору, управляется ьгикропроцессорной системой, состоящей из проце ссора 2, оперативного запо 1Нающего устройства (01У) 3, постоянного aanoNmHamiaero устройства (ПЗУ) 4, блока синхронизации 5, распределителя 6, блока вывода дискретных сигналов 7, блока вывода временных интервалов 8, блока ввода аналоговых сигналов (АЦП) 9.Входы-выходы процессора 2, ОЗУ 3, ПЗУ А, вхо ды блока временных интервалов 8 и выход АЦП 9 соединены шиной адресов данных 10. Выходы блока вывода временных интервалов 8 соединены с первыми тремя входами распределителя 6, выход которых соединены с управляющими цепями вентилей вынрямителя 1 , На выход АЦП 9 подаются сигналы с датчиков то- ка 11 и напряжения 12 вынрямителя 1, Сигнал с датчика напряжения 12 подается также на вход блока синхронизации 5, первый выход которого соеди- нсн с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, блока вывода дискретных сигналов 7, блока вывода временных интервалов 8 и АЦП 9. Второй вход блока 5 синхронизации соединен со вторым входом распределителя 6, третий вход которого соединен с выходом блока 7 вывода дискретных сигналов 7.
Устройство работает следующим об- разом в соответствии с алгоритмом, приведенным на фиг. 2.
В начале полупериода питающего напряжения на первом выходе блока син- хронизации 5 появляется импульс, по которому производится начальная установка процессора 2, обнуление адрес ных регистров ОЗУ 3, ПЗУ 4, блока вывода дискретных сигналов 7, запуск блока 8 вывода временных интервалов и АЦП 9 (блок 1 на фиг. 2), После начальной установки процессора 2 функционирует в соответствии с содержимым ПЗУ 4: приступает к вычислению управляющего воздействия - определению величины фазы импульсов с регулируемым углом отпирания о(р и номера зоны работы вьтрямителя N (блок 2 фиг. 2). Затем процессор 2 вводит из меренные АЦП 9 среднее значение выпрямленного, тока Id и максима,г1ьное значение питающего напряжения U (блок 3 фиг. 2),
Определение величины угла коьмута- н,ии -г осуществляется из условия равенства нулю тока в секции трансформатора по известной в преобразовательной технике формуле
arccos(coso(- -,--).
Величина j вычисляется в блоке 4 на фиг. 2,
В блоке 5 фиг. 2 01 ределяется фаза задержанных импульсов, как сумма фаз импульсов с заданным углом отпирания и угла коммутации. При этом, если фаза задержанных импульсов оказывается больше фазы регулируемых импульсов (блок 6 фиг. 2),то фаза регулируемых импульсов полагается равной фазе импульсов с згщанным углом отпирания (блок 7 фиг. 2) и устанавливается в единицу идентификатор 1 (блок 8 фиг. 2), после чего фазы выводятся в блок вывода временных интервалов 8, а номер зоны работы выпрямителя N - в блок вывода дискретных сигналов 7 (блок 13 на фиг. 2). Если фаза регулируемых импульсов больше фазы задержанных импульсов сэ(о5 то опрашивается идентификатор 1 (блок 0 фиг. 2) и при раве 1стве его нулю в блок вывода временных интервалов выдаются фазы импульсов «. „ , ос ,,, о( р (блок 14 фиг. 2). Если же иде тифика- тор 1 установлен (), что означает подачу в предыдущем полупериоде импульсов только с фазой с/р, то процессор вычисляет величину индуктивного сопротивления контура комм тации X, для чего вводит значение среднего напряжения из АЦП 9 (блок 9 на фиг. 2).
На фиг. 3,6 показана кривая питающего .напряжения при подаче импульсов управления только с фазой с/ Среднее за полупериод напряжение буде равно
ficto y
ср SUi SLniotdt-it- Up,sinLotdu)tJ
и
-- 2+cos(o(, + r)cos «о.
Подставив в это равенство значение , определяемое по формуле в блоке 4 на фиг. 2, получаем формулу для определения величины индуктивного сопротивления контура коммутации
„ X --- .
Величина X определяется в блоке 11 на фиг. 2, после чего индентифи- катор 1 обнуляется (блок 12 фиг, 2) значения фаз импульсов ci выдаю тся в блок вывода временных ин- тервапов 8, номер зоны работы выпрямителя N - в блок вывода дискретных сигналов 7 (блок 14 на фиг. 2) и процессор ожидает прихода следующего синхроимпульса (блок 15 фиг. 2). По приходу следующего синхроимпульса процессор снова реализует алгоритм на фиг, 2, а блок вывода временных интервалов 8 отсчитывает фазы импульсов управления, которые подаются на первые три входа распределителя 6. Распределитель 6 распределяет импульсы управления по плечам выпрямителя 1 в соответствии с порядком переключения плеч вьтрякителя и полярностью питающего напряжения, сигнал которой подается со второго выхода блока синхронизации 5.
На фиг. 3,а показано распределение 25 ные на величину угла коммутации в
импульсов управления по вентилям 16.1-16.П выпрямителя во второй зоне регулирования прио(. В положительном полупериоде питающего напряжения импульс 0 подается на вентиль 16.1 затем импульс о( о, подается на вентиль 16.4, подключая к нагрузке первую секцию трансформатора, а затем подается иьшульс о1 р на вентиль 16.4, подключая к нагрузке вторую секцию трансформатора. В отрицательном полупериоде импульс о/(5 подается на вентиль
Особенностью алгоритма на фиг. 2 является вычисление значения угла KOM мутации по формуле, предполагающей известное индуктивное сопротивление контура коммутации, определение которого обуславливает выполнение в опре
деленной последовательности ряда действий, а именно при достижении фазой регулируемых импульсов фазы задержанных импульсов прекращают подачу импульсов задержанных и с регулируемым углом отпирания, а импульсы с заданным углом отпирания подаются и на вентили плеч последующей зоны.
Формула изобретени я Способ управления многозонным выпрямителем, подключенным к секционированному трансформатору, имеющему несколько зон регулирования, состоящий-.,в том, что в каждом полупериоде питающего напряжения подают на вентили плеча предыдущей зоны, соответствующего контуру коммутации с большим напряжением, импульсы управления с
заданным углом отпирания, подают на вентили другого плеча предыдущей зоны, соответствутоЕ(его контуру коммутации с Меньшим напряжением, импульсы с заданным углом отпирания, задержан5
О
S
контуре с большим напряжением, подают на вентили последующей зоны импульсы с регулируемым углом отпирания, о т- личающийся тем, что, с це- 0 лью повышения надежности работы и
точности управления, в каждом полупе- рноде питающего напряжения измеряют среднее значение вьтрямленного тока, среднее и максимальное значения питающего напряжения и вычисляют величину угла коммутации у в контуре с большим напря:жением по формулу
Т Y
J- arccos(coso(c- -г,- ) ,
-Um
где л, - величина заданного угла отпирания;
I . - среднее значение выпрямленного токч;
X - величина индуктивного сопротивления контура коммутации, максимальное значение питающего напряжения;
а при достижении фазой регулируемых импульсов фазы задержанных импульсов прекращают подачу импульсов задержанных и с регулируемым углом отпирания, подают импульсы с заданным углом отпирания на вентили плеч последующей зоны, а индуктивное сопротивление контура коммутации определяют по формуле
2U -ffUcp X---. ,
где Ujcj - среднее значение питающего напряжения.
5
0
с
15
На ч о АО
2
I
Определение
, Oip, Л
1
Вдод /tf, Un, yZ.
гх
г f -CfrCCOS(C05d)
.5-1
Выбод ct-o.otp.
7
- - -
/5
Конец 1
Й/еГ
Л
Г Приход
П синхроимп1 / ь с а
Определение
ynpaBAflfCLueeo
8o3deucmoufl
значении напряжение и
тока
Определение
Ьеличины угла, коммутации.
Определение сразы задержанных им- -пульсоб
Определение достижения фодой регулируемых импульсоб (разы задер жанных иппульсоВ
у 21 yrUcp Iti
пL
BSod среднего значения на
Определение сопротибления Konrnt/pa
сраз у про для- Н)(цих импульсоб В SAOK Sb/Soffq бременнь/х интербалоб и номера зоны о 5АОК быЗода дискретнь х сиеналов
Ожидание прихода синхроимпульса
