4;;
го
СП
1чЭ
Изобретение .относится, к электро- технгже, а именно к области автоматического уйравления параллельными Вентильными преобразователями электроподвижного состава переменного тока.
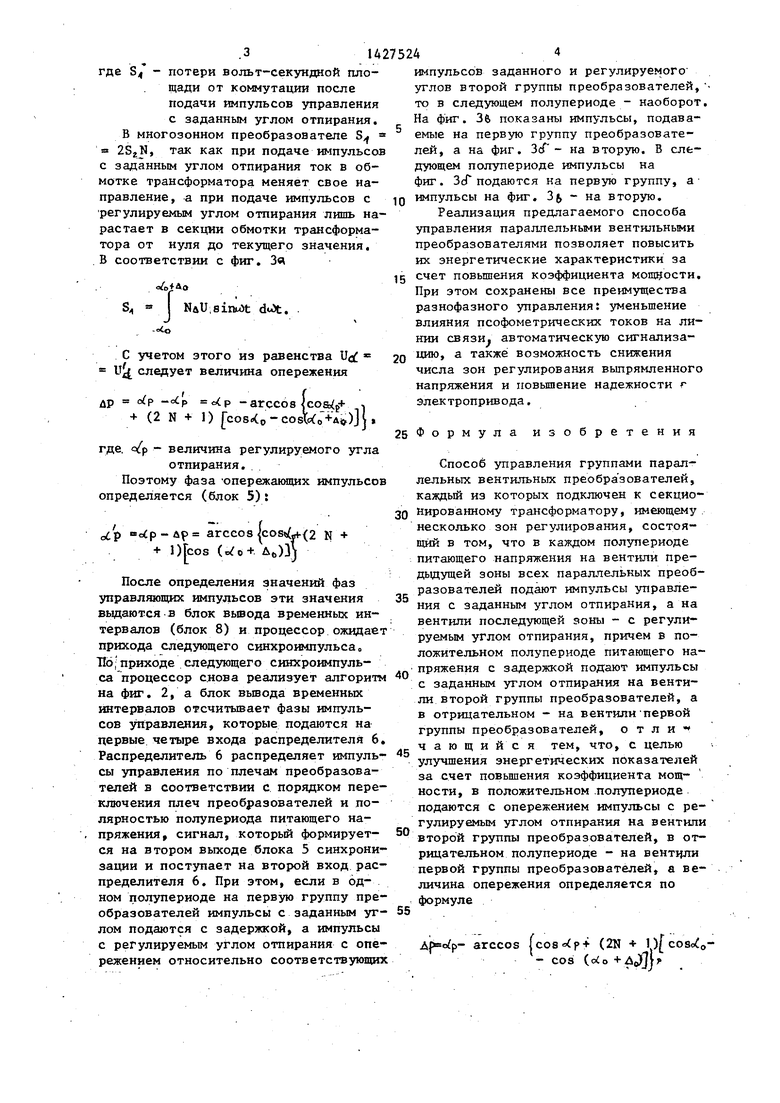
Целью изобретения является улучшение энергетических показателей вентильных преобразователей, работающих цараллельно, за счет повышения коэффициента мощности. ; На фиг. 1 изображено устройство я реализации предлагаемого способа;
10
соответствии с содержимым ПЗУ 4: приступает к вычислению управляющего воздействия - фазы импульсов с заданным и регулируемым углом отпирания, затем переходит к определению величины задержки и опережения импульсов с заданным и регулируемым углами отпирания соответственно. Так как задержка и опережение предназначены для разнесения во времени моментов коммутации групп преобразователей, то обычно импульсы управления с заданным углом отпирания задерживают на величину уг-.
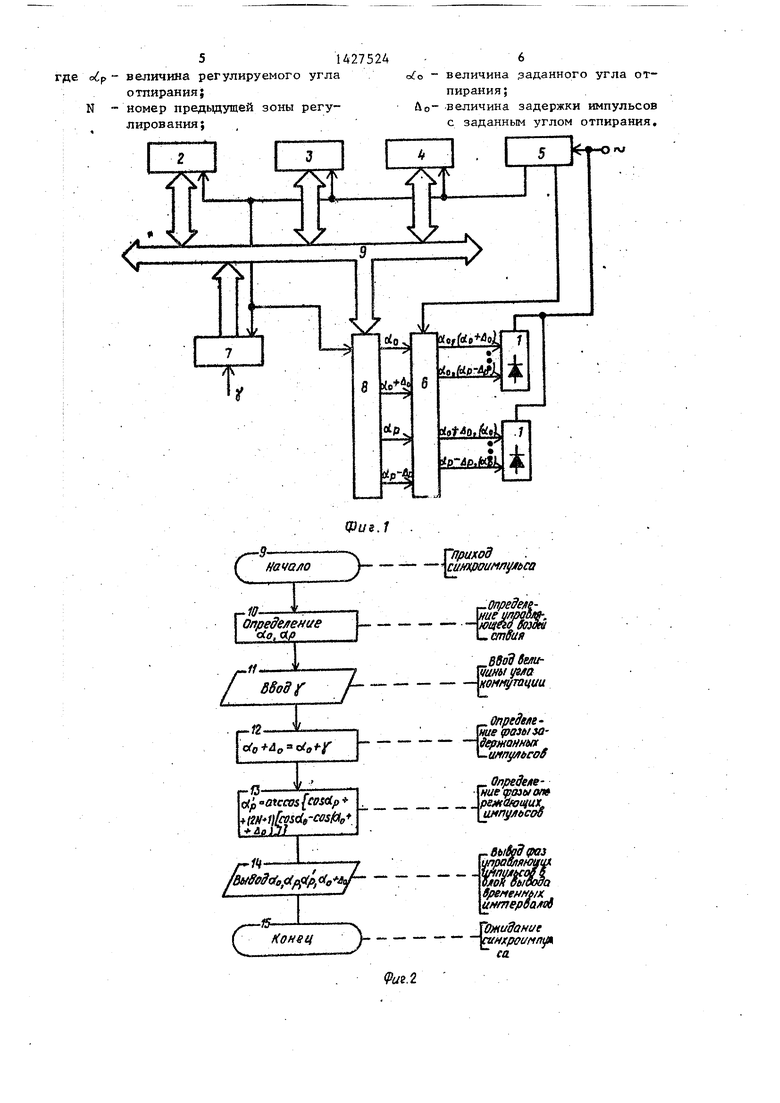
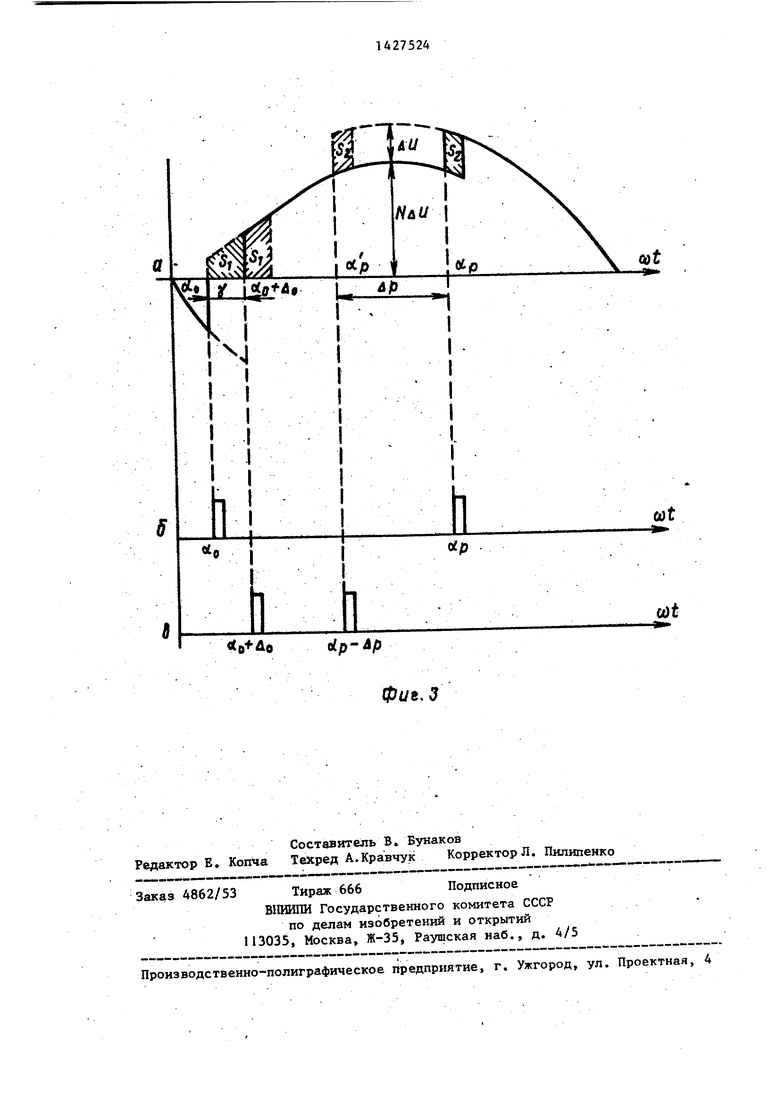
фиг. 2 - алгоритм функционирования 5 ла коммутации . Для этого процессор устройства; на фиг. 3 - временные ди- осуществляет ввод величины угла комму- аграммы, поясняющие предлагаемый спо- тации предыдущего полупериода из бло- фоб.
Параллельные вентильные преобразока ввода временного интервала (блок 11 алгоритма на фиг. 2) и определяет
йатели .1 управляются микропроцессор- 20 ной системой, -состоящей из процессора 2, оперативного запомгшающего уст- |)ойства (ОЗУ) 3, постоянного запоми- 5 ающего устройства (ПЗУ) 4, блока 5 Синхронизации, распределителя 6, бло- 25 венства вьшрямленных напряжений при ka 7 ввода временных интервалов, бло- подаче импульсов отпирания без задерфазу задержанных импульсов как сумму заданного угла отпирания и угла коммутации (блок 12). Величина опережения импульсов с регулируемым углом отпирания определяется из условия ра
соответствии с содержимым ПЗУ 4: приступает к вычислению управляющего воздействия - фазы импульсов с заданным и регулируемым углом отпирания, затем переходит к определению величины задержки и опережения импульсов с заданным и регулируемым углами отпирания соответственно. Так как задержка и опережение предназначены для разнесения во времени моментов коммутации групп преобразователей, то обычно импульсы управления с заданным углом отпирания задерживают на величину уг-.
ла коммутации . Для этого процессор осуществляет ввод величины угла комму- тации предыдущего полупериода из бло-
ла коммутации . Для этого процессор осуществляет ввод величины угла комму тации предыдущего полупериода из бло-
ка ввода временного интервала (блок 11 алгоритма на фиг. 2) и определяет
венства вьшрямленных напряжений при подаче импульсов отпирания без задерфазу задержанных импульсов как сумму заданного угла отпирания и угла коммутации (блок 12). Величина опережения импульсов с регулируемым углом отпирания определяется из условия ра
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многозонным выпрямителем | 1986 |
|
SU1515291A1 |
| Способ управления однофазным инвертором | 1985 |
|
SU1365306A1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| Способ управления однофазным инвертором | 1985 |
|
SU1288866A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Способ управления многозонным преобразователем переменного тока | 1986 |
|
SU1363403A1 |
| Способ раздельного управления реверсивным вентильным преобразователем с двухступенчатой искусственной коммутацией | 1974 |
|
SU542326A1 |
| Способ управления вентальными преобразователями электроподвижного состава переменного тока | 1974 |
|
SU515674A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАВИСИМЫМ ИНВЕРТОРОМ ОДНОФАЗНОГО ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2561068C1 |
Изобретение относится к электрооборудованию подвижного состава железных дорог, а именно к способам регулирования напряжения в микропроцессорных системах управления тяговым электроприводом. Цель изобретения - улучшение энергетических показателей. На один из преобразовате- ,лей импульсы с регулируемым углом отпирания подают с опережением. Величина опережения вычисляется для каждого полупериода из условия, что приращение напряжения, получаемое за счет опережения, компенсирует .потерю напряжения, имеющую место за время от начала полупериода до суммарного угла с заданным углом регулирования и углом коммутации. В результате улучшается коэффициент мощности. 3 ил.
35
ка 8 вьюода временных инт.ервалов. Входы-вькоды процессора 2, ОЗУ 13, ПЗУ 4, выход блока 7 ввода временных , интервалов и вход блока 8 вьшрда Bj)e-,jo манных интервалов соединены шиной 9 адресов-данных. Выходы блока 8 вьшода временных интервалов соединены с первыми четырьмя входами распределителя 6, выходы которого соединены с управ- ляющими цепями вентилей преобразователей 1. Преобразователи питаются от Сети переменного тока, напряжение которой поступает на вход блока 5 синхронизации. Первый выход блока 5 син- . Хронизации соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, блока В ввода временных интервалов. Второй выход блока 5 синхронизации соединен с вторым входом распределителя 6
Устройство работает, в соответствии-с алгоритмом, приведенным на фиг. 2, где указаны блоки алгоритма 9-15.
При переходе питающего напряжения через нулевое значение на первом выходе блока 5 синхронизации появляется импульс, по которому производится начальная установка процессора 2, обнуление, адресных регистров ОЗУ 3 и ПЗУ 5 4, запуск блоков ввода 7 и вывода 8 временных интервалов. После начальной), установки процессор функционирует в
45
50
жки и опережения и при подаче импульсов отпирания с задержкой и опережением Ud « UJ.
В первом случае вьшрямленное напряжение равно (фиг. За): . : sCo
{-l(N-(-l)
Uc(
uU durtV
+ I N/sU sinwt dwt+ I A и sinwtdi t-S,j,)
«Co«-do Zp
где величина заданного угла от
пирания;
АО- величина задержкой импульсов с заданным углом отпирания; uU - величина максимального напряжения секции трансформатора;N - номер предыдущей зоны perу- лярования преобразователя; Бг. - потери вольт-секундной площади от коммутации после подачи импульсов управления с регулируемым углом отпирания .
Во втором случае выпрямленное напряжение равно
of&o
N &Usin tu)du3t -
i (-J . (N+D sih dcOt
-ЧD
iUi
aUsinuit du4: - S),
где S - потери вольт-секундной площади от коммутации после подачи импульсов управления с заданным углом отпирания. В многозонном преобразователе S 25гК, так как при подаче импульсов с заданным углом отпирания ток в обмотке трансформатора меняет свое направление, а при подаче импульсов с регулируемым углом отпирания лишь нарастает в секции обмотки трансформатора от нуля до текущего значения, В соответствии с фиг. Зй
iДa
NaU.sintOt dtOt.
Т
С учетом этого из равенства Uof и следует величина опережения
др -сСр -arccos cosb(p+ + (2 N -t- 1) fcos o-cosUo +д)).
где. - величина регулируемого угла
отпирания.
Поэтому фаза опережакяцих импульсов определяется (блок 5):
р воСр - др arccos |со8Цвц(2 N + + l)cos (уо+ Аб)3)
После определения значений фаз управляющих импульсов эти значения вьщаются в блок вывода временных интервалов (блок 8) и процессор ожидает прихода следзпощего синхроютульса Но;приходе следующего синхроимпульса процессор скова реализует алгоритм на фиг. 2, а блок вьшода временньк интервалов отсчитывает фазы импульсов з равлеяия, которые подаются на первые четыре входа распределителя 6. Распределитель 6 распределяет импульсы управления по плечам преобрааова- телей в соответствии с порядком переключения плеч преобразователей и полярностью полупериода питающего напряжения, сигнал, который формируется на втором выходе блока 5 синхронизации и поступает на второй вход распределителя 6. При этом, если в одном полупериоде на первую группу преобразователей импульсы с заданным углом подаются с задержкой, а импульсы с регулируемым углом отпирания с опережением относительно соответствующих
импульсов заданного и регулируемого углов второй группы преобразователей, то в следующем полупериоде - наоборот. На фиг. 36 показаны импульсы, подаваемые на первую группу преобразователей, а на фиг. ЗсГ - на вторую. В следующем полупериоде импульсы на фиг. ЗсГ подаются на первую группу, аQ импульсы на фиг. 3(, - на вторую.
Реализация предлагаемого способа управления параллельньми вентильными преобразователями позволяет повысить их энергетические характеристики за
5 счет повышения коэффициента мощности. При этом сохранены все преимущества разнофазного управления: уменьшение влияния псофометрических токов на линии связи, автоматическую сигнапиза
цию, а также возможность снижения
числа ЗОИ регулирования выпрямленного напряжения и повышение надежности г электропривода.
5 Формула изобретения
Способ управления группами параллельных вентильных преобразователей, каждый из которых подключен к секцио0 Нированному трансформатору, имеющему , несколько зон регулирования, состоящий в том, что в каждом полупериоде питающего напряжения на вентили предыдущей зоны всех параллельных преобразователей подают импульсы управления с заданным углом отпирания, а на вентили последующей зоны - с регулируемым углом отпирания, причем в положительном полупериоде питающего наJ. пряжения с задержкой подают импульсы ; с заданным углом отпирания на вентили второй группы преобразователей, а в отрицательном - на вентили первой группы преобразователей, о т л и
чающийся тем, что, с целью улучшения энергетических показателей за счет повьшения коэффициента мощности, в положительном .полупериоде подаются с опережением импульсы с ре- гулируемым углом отпирания на вентипи второй группы преобразователей, в отрицательном полупериоде - на вентили первой группы преобразователей, а величина опережения определяется по
формуле 5
arccos (2N + l)cosoio- cos (
5
0
где - величина регулируемого угла
отпирания;
N - номер предыдущей зоны регулирования;
- величина заданного угла отпирания;
Ло величина задержки импульсов с заданным углом отпирания.
6
dp-Лр
Ф(/8. J
| Устройство для управления параллельными статическими преобразователями | 1980 |
|
SU884068A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления параллельными статическими преобразователями | 1975 |
|
SU731548A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
