Изобретение относится к электротехнике, к управлению входными преобразователями электроподвижного состава переменного тока, может быть использовано для улучшения формы потребляемого тока тяговым приводом с четырехквадрантными преобразователями, снижения риска возникновения аварийных режимов работы.
Известен способ управления четырехквадрантным преобразователем, заключающийся в том, что задают частоту коммутации полупроводниковых ключей преобразователя и измеряют ток на входе преобразователя. По измеренным значениям тока, используя аналитические зависимости для прогнозируемого значения тока, определяют энергооптимальные фазы коммутации (Патент ФРГ №4129261 от 08.10.92 г. Способ цифрового регулирования четырехквадрантного преобразователя, подключенного к сети переменного напряжения через трансформатор).
Недостатком способа является существование значительной ошибки накопления, возникающей при использовании в определении прогнозируемого тока эмпирических коэффициентов, зависящих от импеданса и активного сопротивления стороны переменного тока преобразователя, а также от длительности периода считывания мгновенных значений тока и напряжения.
Известно микропроцессорное устройство управления четырехквадрантным преобразователем, содержащее набор датчиков тока и напряжения, процессор, широтно-импульсный модулятор напряжения, задатчик амплитуды потребляемого тока, а также устройства сопряжения с четырехквадрантным преобразователем. Управляющие команды на вентили четырехквадрантного преобразователя задаются в указанном устройстве в цифровом виде сигналами, поступающими с устройств сопряжения системы управления с четырехквадрантным преобразователем (см. там же).
Устройство имеет функциональные ограничения по определению фаз коммутации вследствие отсутствия оперативной информации об изменении нагрузки.
Применение указанного устройства на электроподвижном составе не гарантирует точности управления, в частности, не обеспечивает в текущем полупериоде оптимальные моменты коммутации включения-выключения силовых полупроводниковых приборов (вентилей) с учетом зависимости ширины модулирующих импульсов напряжения на входе преобразователя от глубины модуляции.
Наиболее близким по технической сущности является способ управления четырехквадрантным преобразователем с вычислением фаз коммутации, состоящий в том, что формируют и заносят в память системы управления преобразователя для диапазона допустимых рабочих частот коммутации преобразователя массивы зависимостей длин коммутационных интервалов силовых полупроводниковых приборов (СПП) от глубины модуляции в соответствии с количеством ШИМ-интервалов, задают при помощи системы управления действующее значение напряжения на выходе преобразователя, действующее значение сетевого тока и значение фазового сдвига между сетевым напряжением и сетевым током, значение сетевого тока регулируют изменением продолжительности времени приложения на входе преобразователя напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости выходного фильтра, при этом продолжительности времени приложения напряжения источника напряжения переменного тока и разности напряжений источника переменного напряжения и емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол
где Х - индуктивное сопротивление контура протекания сетевого тока при приложении на вход преобразователя напряжения источника переменного напряжения;
I - действующее значение сетевого тока; U - действующее значение напряжения источника переменного напряжения, измеряют для каждого полупериода при помощи датчиков тока и датчиков напряжения фактические значения сетевого тока и напряжения на выходе преобразователя, определяют интегральное рассогласование выходного напряжения, ограничивают интегральное рассогласование по максимуму и минимуму, определяют глубину модуляции по формуле μ=μ0-Δμ, где μ0 - значение модуляции в номинальном режиме работы преобразователя; Δμ - величина коррекции сигнала управления на включение-отключение вентилей, вычисляют интервалы коммутации управляемых силовых полупроводниковых приборов. (Алгоритмы управления четырехквадрантным преобразователем / А.В.Беляев, К.П.Солтус, М.Ю.Капустин // Электровозостроение: Сб. науч. тр. / ОАО "Всерос. науч.-иссл. и проектно-конструкт. ин-т электровозостроения" (ОАО "ВЭлНИИ"). - Новочеркасск, 2003. Т.45. С.341-354).
При таком способе управления не учитывается время коммутации силовых полупроводниковых приборов, т.е. время, в течение которого вентиль (тиристор, транзистор) открывается или, наоборот, закрывается. В зависимости от типа и динамических свойств приборов, обусловленных их паспортными данными, характером нагрузки и прочими условиями и режимами эксплуатации преобразователя, длительность процесса коммутации может достигать неприемлемых значений по условиям безаварийной работы. То есть (особенно в области высоких частот модуляции) при включении вентилей в одном из плеч преобразователя и одновременном протекании тока в другом плече возможны моменты перекрытия контуров протекания коммутируемого тока, приводящие к аварийным режимам работы преобразователя.
Наиболее близким по технической сущности является микропроцессорное устройство управления четырехквадрантным преобразователем, реализующее указанный способ управления, содержащее таймер, процессор, оперативное запоминающее устройство, постоянное запоминающее устройство, аналого-цифровой преобразователь, блок драйверов, управляющих четырехквадрантным преобразователем, имеющим датчик входного тока, выход которого соединен с синхронизатором и с одним из входов АЦП, другой вход АЦП подключен к задатчику амплитуды входного тока. Входы-выходы таймера, процессора, оперативного запоминающего устройства и постоянного запоминающего устройства, выход аналогово-цифрового преобразователя и входы блока драйверов объединены шиной данных-адресов. Четырехквадрантный преобразователь и синхронизатор запитаны переменным напряжением. Вход синхронизатора соединен с входом сброса таймера и шиной прерывания процессора (Солтус К.П. Формирование логики управления четырехквадрантным преобразователем // Известия вузов. Сев.-Кавк. регион. Технические науки. - 2004. - №1. - С.37-40).
Такое устройство не позволяет обеспечить точность управления преобразователя при изменении нагрузки по причине отсутствия информационных каналов связи с блоками управления нагрузкой (инвертором). Кроме того, устройство не обеспечивает контроль одновременной коммутации во всех плечах преобразователя. Указанный недостаток создает риск возникновения аварийных процессов в случае протекания сквозных токов в преобразователе.
Задачей изобретения является разработка способа управления четырехквадрантным преобразователем с вычислением фаз коммутации, исключающий аварийные режимы, в частности, совпадение времени включения-выключения вентилей в соседних (параллельных) плечах преобразователя. Также задачей изобретения является разработка микропроцессорного устройства, реализующего указанный способ управления и обеспечивающего расширение информационных функций для лучшей контролируемости регулируемых параметров.
Поставленная задача решается тем, что в способ управления четырехквадрантным преобразователем с вычислением фаз коммутации, состоящий в том, что формируют и заносят в память системы управления преобразователя для диапазона допустимых рабочих частот коммутации преобразователя массивы зависимостей длин коммутационных интервалов силовых полупроводниковых приборов от глубины модуляции в соответствии с количеством ШИМ-интервалов, задают при помощи системы управления действующее значение напряжения на выходе преобразователя, действующее значение сетевого тока и значение фазового сдвига между сетевым напряжением и сетевым током, значение сетевого тока регулируют изменением продолжительности времени приложения на входе преобразователя напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости выходного фильтра, при этом продолжительности времени приложения напряжения источника напряжения переменного тока и разности напряжений источника переменного напряжения и емкости выходного фильтра определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол
где Х - индуктивное сопротивление контура протекания сетевого тока при приложении на вход преобразователя напряжения источника переменного напряжения;
I - действующее значение сетевого тока; U - действующее значение напряжения источника переменного напряжения, измеряют для каждого полупериода при помощи датчиков тока и датчиков напряжения фактические значения сетевого тока и напряжения на выходе преобразователя, определяют интегральное рассогласование выходного напряжения, ограничивают интегральное рассогласование по максимуму и минимуму, определяют глубину модуляции по формуле μ=μ0-Δμ, где μ0 - значение модуляции в номинальном режиме работы преобразователя; Δμ - величина коррекции сигнала управления на включение-отключение вентилей, вычисляют интервалы коммутации управляемых силовых полупроводниковых приборов, введены новые признаки - корректируют значение интервалов включения вентилей с учетом времени коммутации вентилей преобразователя на основании паспортных данных управляемых вентилей, режимов работы и характера нагрузки преобразователя. При этом в каждом полупериоде питающего напряжения ограничивают максимальную частоту модуляции длительностью коммутации вентиля.
Для реализации описанного способа предлагается микропроцессорное устройство управления четырехквадрантным преобразователем, состоящее из таймера, процессора, оперативного запоминающего устройства, постоянного запоминающего устройства, аналого-цифрового преобразователя, блока драйверов, управляющих четырехквадрантным преобразователем, имеющим датчик входного тока, выход которого соединен с синхронизатором и с одним из входов АЦП, другой вход АЦП подключен к задатчику амплитуды входного тока, входы-выходы таймера, процессора, ОЗУ, ПЗУ, выход АЦП и входы блока драйверов объединены шиной данных-адресов, при этом четырехквадрантный преобразователь и синхронизатор запитаны переменным напряжением, вход синхронизатора соединен с входом сброса таймера и шиной прерывания процессора, дополнительно содержит блок вычисления фаз коммутации силовых полупроводниковых приборов, программный блок ограничения коммутационного интервала, блок связи с нагрузкой четырехквадрантного преобразователя, соединенные с процессором по шине данных-адресов, датчик режима сети, датчик выходного напряжения преобразователя соединенный с АЦП, выход датчика режима сети подключен к входу блока синхронизирующих импульсов.
Учитывая высокочастотные режимы коммутации вентилей четырехквадрантного преобразователя, у указанного устройства нет зоны нечувствительности к отклонению регулируемой величины.
Положительным эффектом предлагаемого способа управления четырехквадрантным преобразователем с вычислением фаз коммутации является возможность учета и контроля времени выключения вентилей в одном плече и времени включения в другом плече с целью предупреждения возникновения контуров протекания сквозных токов.
Положительный эффект предлагаемого микропроцессорного устройства заключается в расширении информационных функций для лучшей контролируемости регулируемых параметров четырехквадрантного преобразователя. Введение новых блоков в состав устройства обеспечивает реализацию способа управления четырехквадрантным преобразователем с вычислением фаз коммутации, осуществляя контроль энергооптимальной коммутации вентилей наряду со снижением риска возникновения аварийного режима работы (предотвращение протекания сквозных токов).
На представленных к описанию фигурах показано:
На фиг.1 представлена блок-схема предлагаемого алгоритма управления четырехквадрантным преобразователем с вычислением фаз коммутации.
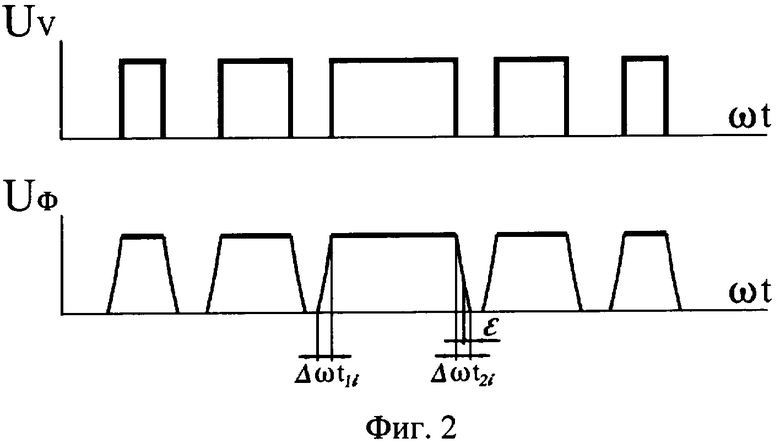
На фиг.2 представлена типовая зависимость времен коммутации силового полупроводникового прибора четырехквадрантного преобразователя от напряжения нагрузки для одного полупериода питающего напряжения.
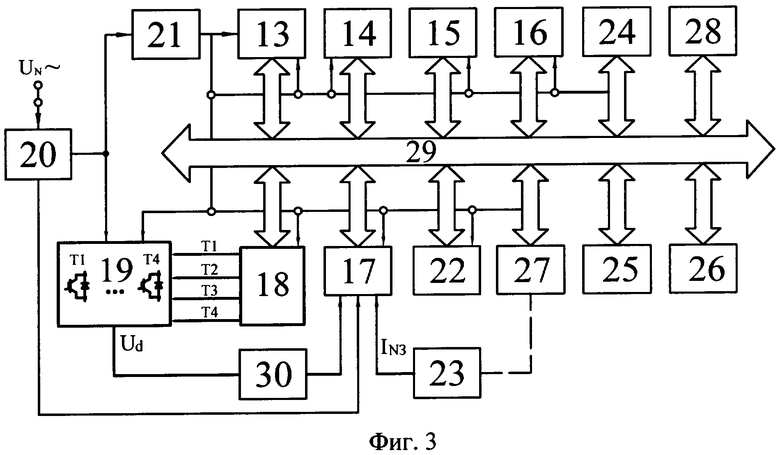
На фиг.3 представлен вариант микропроцессорного устройства управления четырехквадрантным преобразователем, реализующий предлагаемый способ управления.
Способ реализуется алгоритмом, приведенным на фиг.1.
Работа преобразователя начинается по приходу команды на запуск системы управления (блок 1 (на фиг.1)). В блоке 2 осуществляют загрузку в память системы управления рабочих параметров и допустимых рабочих значений преобразователя (например, допустимое значение коэффициента гармоник КД (коэффициента нелинейных искажений)), напряжения на входе преобразователя, приведенной индуктивности входной цепи и др., а также ввод массивов длин коммутационных интервалов вентилей преобразователей от модуляции для возможного диапазона модулируемых частот ωt=f(μ). В блоке 3 выполняют ввод текущих параметров работы преобразователя - заданного значения сетевого тока INЗ и выходного напряжения UdЗ. В блоке 4 измеряют мгновенные значения входного тока IN и выходного напряжения Ud преобразователя. В блоке 5 выполняют сравнение значений заданного выходного напряжения UdЗ и фактического (измеренного) Ud. В случае несоответствия переходят в блок 6. В блоке 6 изменяют модуляцию напряжения μ в соответствии с рассогласованием заданного UdЗ и фактического Ud напряжения с последующим переходом в блок 4. При недостаточном значении уменьшают модуляцию напряжения μ, при избыточном фактическом напряжении увеличивают модуляцию напряжения. В блоке 5, если значения заданного выходного напряжения и фактического (измеренного) совпадают, осуществляют переход в блок 7. В блоке 7 вычисляют фазы коммутации ωt СПП без учета динамических свойств вентилей, т.е. представляют их «идеальными» ключами с мгновенной коммутацией. В блоке 8 корректируют фазы коммутации с учетом динамических свойств вентилей. На основании полученной последовательности импульсов применительно к ближайшему полупериоду прогнозируют кривую сетевого тока и раскладывают ее на гармонические составляющие (блок 9), например, в ряды Фурье. При этом соответственно изменяется длительность импульсов напряжения, определенных при условии мгновенной коммутации вентилей. Определяют коэффициент гармоник (коэффициент нелинейных искажений) по формуле  ,
,
где I1 - действующее значение тока основной гармоники тока сети, n - количество анализируемых гармоник, Ii - действующее значение тока i-ой гармоники тока сети. В блоке 10 сравнивают полученный коэффициент гармоник KГ с допустимым КД. В случае несоответствия в блоке 11 уменьшают фазы фронтов импульсов коммутации:
- переднего (при включении) ωt1i по формуле Δωt1i=Δωti-1-ε,
где Δωti-1 - длительность коммутации в предыдущем периоде регулирования переднего фронта одноименного импульса, ε - шаг изменения времени непроводящего состояния,
- заднего (при выключении) Δωt2i по формуле Δωt2i=Δωt2i-1+ε,
где Δωt2i-1 - длительность коммутации в предыдущем периоде регулирования заднего фронта одноименного импульса, ε - шаг изменения времени непроводящего состояния. Значение ε можно принять равным, например 0,1 мкс. Такое значение времени является приемлемым исходя из традиционного для электроподвижного состава диапазона рабочих частот четырехквадрантного преобразователя (не более 3000 Гц). При вычислении КГ значение n можно принять равным 60.
При работе с высокой частотой длительность паузы (абсолютное время между соседними импульсами) становится малым и соизмеримым с длительностью выключения вентиля. В этой связи ограничивают длительность паузы между коммутациями фактическим временем закрытия вентиля, поскольку длительность паузы не должна быть меньше паспортного времени выключения. Например, в случае синусоидальной ШИМ (фиг.2) совпадению проводящих состояний вентилей наиболее подвержены центральные импульсы в полупериоде.
После указанных вычислений при смене полупериода питающего напряжения возвращаются в блок 5. В блоке 12 реализуют логику управления вентилями преобразователем. В качестве алгоритма формирования логики управления преобразователем можно использовать, например, алгоритм, описанный в публикации: Солтус К.П. Формирование логики управления четырехквадрантным преобразователем // Известия вузов. Сев.-Кавк. регион. Технические науки. - 2004. - №1. - С.37-40.
Далее процесс управления продолжается (блок 3) до окончания работы преобразователя. Прерывание алгоритма работы допускается в любом блоке (фиг.1).
Времена включения - отключения СПП можно заранее определить исходя из предполагаемых режимов и алгоритмов работы преобразователя по известным параметрам.
Предварительное определение динамических свойств и формирование массивов фактических длительностей импульсов коммутации силовых полупроводниковых приборов можно выполнить по методике (см. Лещев А.И. Практические рекомендации по применению IGBT транзисторов / А.И.Лещев, В.В.Никонов, К.П.Солтус, К.Н.Суслова. // Электровозостроение: Сб. науч. тр. / ОАО "Всерос. н-и. и проектно-конструкт ин-т электровозостроения" (ОАО "ВЭлНИИ"). - 1999. - Т.41. - С.179-188), на основании справочных данных каталогов производителей силовых полупроводниковых приборов.
На фиг.2 представлена типовая зависимость времен коммутации силового полупроводникового прибора четырехквадрантного преобразователя от напряжения нагрузки. Как видно из графика, в случае пренебрежения длительностью коммутации UV=f(ωt) существует опасность протекания сквозных токов через разнополупериодные вентильные плечи преобразователя. Зависимость UФ=f(ωt) отражает возможные формы импульсов напряжения, прикладываемых к вентилям.
В результате указанных операций по управлению преобразователем предотвращается аварийный режим работы преобразователя вследствие одновременной коммутации разнополупериодных вентильных плечей. При этом указанный способ управления не ухудшает качество потребляемого тока.
Способ реализуют микропроцессорным устройством (фиг.3).
Устройство содержит: таймер 13, процессор 14, оперативное запоминающее устройство 15, постоянное запоминающее устройство 16, аналого-цифровой преобразователь 17, блок драйверов 18, управляющих вентилями четырехквадрантного преобразователя 19, имеющим датчик входного тока 20, выход которого соединен с синхронизатором 21 и с одним из входов АЦП 17, другой вход АЦП 17 подключен к задатчику амплитуды входного тока 23. Кроме того, устройство содержит блок вычисления фаз коммутации 22 силовых полупроводниковых приборов преобразователя 19, датчик выходного напряжения 30, блок ограничения коммутационного интервала (БОКИ) 24, блок связи (БСН) 25 с нагрузкой 26, задатчик параметров работы 27 преобразователя 19, блок ввода-вывода временного интервала 28. Входы-выходы таймера 13, процессора 14, ОЗУ 15, ПЗУ 16, выход АЦП 17 и входы блока драйверов 18 объединены шиной данных-адресов 29. Четырехквадрантный преобразователь 19 и синхронизатор 21 запитаны переменным напряжением, вход синхронизатора 21 соединен с входом сброса таймера 13 и шиной прерывания процессора 14. Выход датчика сетевого тока 20 подключен к входу синхронизатора 21. Мгновенное значение напряжения на выходе четырехквадрантного преобразователя измеряется датчиком выходного напряжения 30. Датчик выходного напряжения 30 подключен на выходе преобразователя 19, информационный выход датчика 30 подключен к АЦП 17.
Процессор 14 является центральным вычислительным ядром, реализующим основные протоколы обмена информацией между блоками и элементами устройства.
В блоке 22 выполняются логически-арифметические операции вычисления фаз коммутации на основании массивов данных, хранящихся в ПЗУ 16, в зависимости от рабочей частоты преобразователя 19. Вычисленные в блоке 22 фазы коммутации адресуются блоку драйверов 18 вентилей преобразователя 19. Тип блока драйверов 18 определяется типом вентилей, главным образом транзисторов.
В блоке ограничения коммутационного интервала (БОКИ) 24 отслеживают и сравнивают времена межкоммутационных интервалов с максимально возможной длительностью коммутации вентилей в зависимости от значения нагрузки.
Блок 25 связи с нагрузкой 26 адресует по шине 29 оперативную информацию об изменении нагрузки 26. Это способствует быстродействию регулирования потребляемого тока преобразователем 19.
В качестве задатчика параметров 27 могут использоваться, например, приборы пульта машиниста электроподвижного состава (рукоятки контроллера машиниста, переключатели, клавиатура с блоком индикации). В качестве задатчика амплитуды входного тока 23 может являться один из ручных органов управления электроподвижного состава, например, рукоятка задания силы тяги.
Блок 28 обеспечивает формирование управляющих сигналов в соответствии с вычисленными фазами коммутации в блоке 22, адресуемых в блок драйверов 18 преобразователя 19.
Блок вычисления фаз коммутации 22 силовых полупроводниковых приборов, программный блок ограничения коммутационного интервала 24, блок связи 25 с нагрузкой четырехквадрантного преобразователя соединены с процессором 14 по шине данных-адресов 29.
В указанном устройстве таймер 13, процессор 14, ОЗУ 15, ПЗУ 16, БОКИ 24, БСН 25 могут быть интегрированы в специализированный контроллер, например M167-1C (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037 Москва, Измайловская пл.,7).
Устройство работает следующим образом.
При переходе питающего напряжения UN через нулевое значение на выходе блока синхронизации 21 появляется импульс, по которому производят начальную установку процессора 14, ОЗУ 15, ПЗУ 16, блока ввода-вывода временного интервала 28 и запуск АЦП 17. После этого микропроцессорное устройство управления четырехквадрантным преобразователем функционирует в соответствии с командами, массивами и константами, записанными в ПЗУ 16, причем в первом полупериоде питающего напряжения значение модуляции задают равным номинальному.
По приходу синхроимпульса (блок 1) сигналы с датчика сетевого тока 20 и датчика напряжения 30 на выходе преобразователя 19 поступают на АЦП 17. В соответствии с заданными значениями сетевого тока и напряжения на выходе преобразователя 17, поступающими с задатчика режимов работы 27 по шине данных 29 в процессор 14, определяют необходимую модуляцию напряжения. Измеряют значение тока, поступающего в АЦП 17 с датчика тока сети 20. В соответствии с массивами ωt=f(μ) в блоке вычисления фаз коммутации 22 определяют необходимые моменты коммутации вентилей преобразователя 19. Для каждого коммутационного интервала выполняют сравнение продолжительности непроводящего состояния вентилей с паспортным временем коммутации, предварительно записанным и хранящимся в ПЗУ 16. В случае превышения паспортного времени коммутации уменьшают длительность импульса путем ограничения фазы переднего и заднего фронта импульса по командам, поступающим из БОКИ 24. С целью сокращения количества вычислительных операции процессора 14 сравнение продолжительности непроводящего состояния вентилей с паспортным временем коммутации выполняют только при изменении тока нагрузки. Сигнал об изменении тока нагрузки поступает от нагрузки 26 через БСН 25 по шине 29 в процессор 14.
При этом организация работы блока связи с нагрузкой 25 выполнена таким образом, что исключает зону нечувствительности к отклонению регулируемой величины.
Таким образом, совокупность известных и вновь введенных в предлагаемом способе действий над материальными объектами позволяет решить задачу, на которую направлено изобретение, обеспечив при этом получение требуемого технического результата. Способ технически реализуем и обладает новизной.
Пути реализации указанных способов управления четырехквадрантным преобразователем с вычислением фаз коммутации и устройства его реализующего не исключают и иных вариантов их осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2003 |
|
RU2261519C2 |
| СПОСОБ ФОРМИРОВАНИЯ СЕТЕВОГО ТОКА ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2009 |
|
RU2419950C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2314940C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| ЧЕТЫРЕХКВАДРАНТНЫЙ ПРЕОБРАЗОВАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2310969C1 |
Изобретение относится к области электротехники и может быть использовано для управления электроприводами электроподвижного состава переменного тока. Технический результат - повышение точности управления преобразователем, исключение аварийных режимов. В способе управления четырехквадрантным преобразователем с вычислением фаз коммутации формируют и заносят в память системы управления преобразователя для диапазона допустимых рабочих частот коммутации преобразователя массивы зависимостей длин коммутационных интервалов вентилей от глубины модуляции в соответствии с количеством ШИМ-интервалов. При помощи системы управления задают действующее значение напряжения на выходе преобразователя, действующее значение сетевого тока и значение фазового сдвига между сетевым напряжением и сетевым током. Значение сетевого тока регулируют изменением модуляции напряжения на входе преобразователя. Вычисляют интервалы коммутации управляемых вентилей и изменяют значение модуляции напряжения путем коррекции сигнала управления на включение-отключение вентилей. Способ отличается тем, что корректируют значение интервалов включения вентилей с учетом времени коммутации вентилей преобразователя на основании паспортных данных управляемых вентилей, режимов работы и характера нагрузки преобразователя, при этом в каждом полупериоде питающего напряжения ограничивают максимальную частоту модуляции длительностью коммутации вентиля. Микропроцессорное устройство управления четырехквадрантным преобразователем содержит таймер, процессор, ОЗУ, ПЗУ, АЦП, блок драйверов, датчик тока, синхронизатор и задатчик амплитуды входного тока, входы-выходы таймера, процессора, ОЗУ, ПЗУ, выход АЦП и входы блока драйверов объединены шиной данных-адресов, задатчик параметров работы преобразователя, датчик напряжения, блок вычисления фаз коммутации вентилей, блок ограничения коммутационных интервалов, блок ввода-вывода временного интервала, блок связи с нагрузкой преобразователя работы. 2 н.п. ф-лы, 3 ил.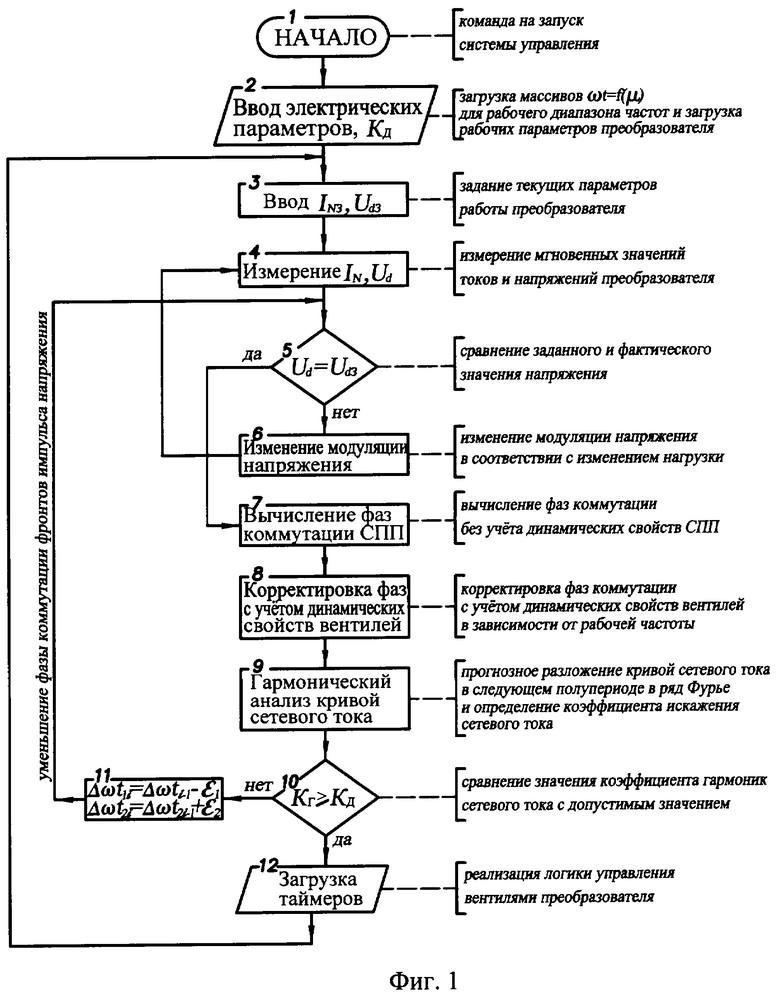
где X - индуктивное сопротивление контура протекания сетевого тока при приложении на вход преобразователя, напряжения источника переменного напряжения; I - действующее значение сетевого тока; U - действующее значение напряжения источника переменного напряжения, измеряют для каждого полупериода при помощи датчиков тока и датчиков напряжения фактические значения сетевого тока и напряжения на выходе преобразователя, определяют интегральное рассогласование выходного напряжения, ограничивают интегральное рассогласование по максимуму и минимуму, определяют глубину модуляции по формуле μ=μ0-Δμ, где μ0 - значение модуляции в номинальном режиме работы преобразователя; Δμ - величина коррекции сигнала управления на включение-отключение вентилей, вычисляют интервалы коммутации управляемых силовых полупроводниковых приборов, отличающийся тем, что корректируют значение интервалов включения вентилей с учетом времени коммутации вентилей преобразователя, на основании паспортных данных управляемых вентилей, режимов работы и характера нагрузки преобразователя, при этом в каждом полупериоде питающего напряжения ограничивают максимальную частоту модуляции длительностью коммутации вентиля.
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2003 |
|
RU2261519C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД МНОГОСИСТЕМНОГО ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2248892C1 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| Способ прокладки балластируемого трубопровода | 1984 |
|
SU1252594A1 |
| US 4853832 A, 01.08.1989 | |||
| Способ лечения туберкулеза мочевого пузыря | 2018 |
|
RU2702607C1 |
| DE 4129261 C1, 08.10.1992 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

