со а: сд
00
Изобретение относится к электротехнике, в частности к преобразовательной технике, и может быть использовано при автоматическом регулировании однофазных инверторов электроподвижного состава переменного тока на постоянство угла погасания (запаса). Целью изобретения является улучшение качества регулирования при минимальных углах запаса.
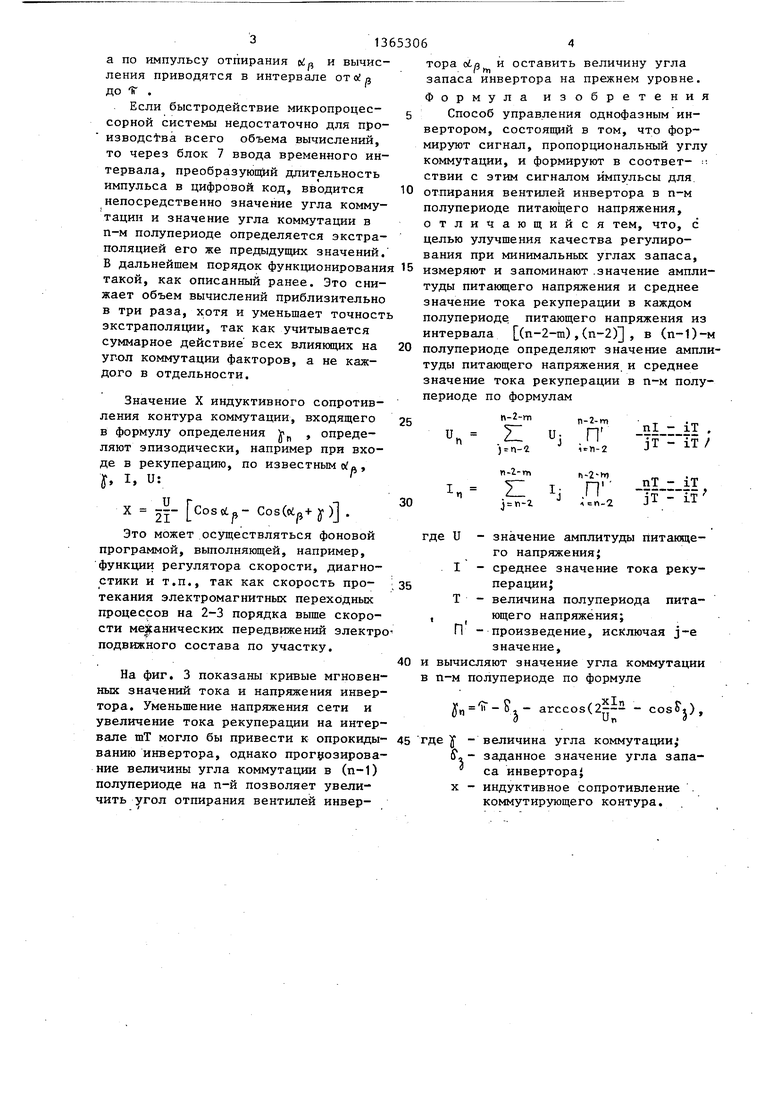
На фиг, 1 изображено устройство для реализации предлагаемого cnoco6aj на фиг. 2 - алгоритм функционирования устройства в (п-1)-м полупериоде4 з фиг. 3 - временные диаграммы, поясня- кхцие способ.
Инвертор 1 управляет микропроцессорной системой, состоящей из процессора 2, оперативного запоминающего устройства (ОЗУ) -3, постоянного запоминающего устройства (ПЗУ) 4, блока 5 синхронизации, аналого-цифрового преобразователя (АДП) 6, блока 7 ввода временного интервала, дискретного фазосдвигающего устройства 8 и распределителя 9. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, выходы АЦП 6, блока 7 ввода временного интервала и вход дискретного фазосдвигающего устройства 8 соединены шиной 10 адресов данных. Выход дискретного фазосдвигающего устройства 8 соединен
По вычисленным значениям 1„, и„ определяется (блок 5, фиг.2) величина угла коммутации в п-м полупериоде )г и вводится в реализуемый про- и h
с входом распределителя 9, выходы
которого соединены с управля1Ьщими це- 5 граммно (блок 6 фиг.2) пропорциональ- пями вентилей инвертора 1. Инвертор ный регулятор, вычисляющий управляющее воздействие .
После этого осуществляется вывод значений фазы д (блок 7, фиг. 2) 40 в дискретное фазосдвигающее устройство В и процессор 2 переходит в режим ожидания следующего синхроимпульса. В следующем полупериоде на выходе дискретного фазосдвигающего 45 устройства.8 формируется импульс отпирания вентилей инвертора, фаза которого сдвинута относительно синхроимпульса на величину ог Q . РаспредеПри переходе питающего напряжения литель 9 распределяет импульсы по через нулевое значение на выходе бло- Q плечам преобразователя в зависимости ка 5 синхронизации появляется импульс, от полупериода питающего напряжения, по. которому производится начальная установка процессора 2, ОЗУ 3, ПЗУ 4, блока 7 ввода временного интервала и дискретного фазосдвигающего устрой- gg ны угла коммутации использовать зна- ства 8 и запускается АЦП 6. После это- чения тока и напряжения и за (п-1)-й го микропроцессорная система функционирует в соответствии с командами и константами, записанными в ПЗУ 4.
1 нагружен на однофазную сеть переменного тока, напряжение которой поступает на вход блока 5 синхронизации Вькод блока синхронизации соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, АЦП 6, блока 7 ввода временного интервала, дискретного фазосдвигающего устройства 8 и распределителя 9.
Устройство работает в соответствии с алгоритмом, приведенным на фиг.2.
При значительных колебаниях тока рекуперации и напряжения питающей сети целесообразно для прогноза величиполуцериод. Для этого управляющая программа (фиг.2) остается той же, но запускается не по синхроимпульсу.
Осуществляется ввод ( блок 2 на фиг.2) из памяти АЦП 6 измеренного среднего значения тока и амплитуды напряжения предыдущего (п-2) полупериода и запоминание этих значений в ОЗУ 3. Затем на основании значений этих величин в предыдущих m полупериодах осуществляется их экстраполяция на п-й полупериод (блоки 3 и 4,фиг.2)
Исследования многочлена при экстраполяции гармонических сигналов различной частоты показали, что при периоде исследуемого сигнала больше 0,135с многочлен позволяет получить прогнозируемое значение параметра с точностью выше 6%.
Поскольку величины производных среднего за полупериод значения то- ка и амплитуды питающего напряжения в эксплуатационных режимах не превышают производных гармонического сигнала с периодом 0,2 с, то максимальная погрешность экстраполяции при полупериоде питающего напряжения Юме не будет превышать 6%.
Таким образом, имеется возможность прогноза параметров с точностью не ниже точности измерений этих пара- метров.
По вычисленным значениям 1„, и„ определяется (блок 5, фиг.2) величина угла коммутации в п-м полупериоде )г и вводится в реализуемый про- и h
граммно (блок 6 фиг.2) пропорциональ- ный регулятор, вычисляющий управляющее воздействие .
литель 9 распределяет импульсы по плечам преобразователя в зависимости от полупериода питающего напряжения, ны угла коммутации использовать зна- чения тока и напряжения и за (п-1)-й
При значительных колебаниях тока рекуперации и напряжения питающей сети целесообразно для прогноза величилитель 9 распределяет импульсы по плечам преобразователя в зависимости от полупериода питающего напряжения, ны угла коммутации использовать зна- чения тока и напряжения и за (п-1)-й
полуцериод. Для этого управляющая программа (фиг.2) остается той же, но запускается не по синхроимпульсу.
а по импульсу отпирания tin и вычисления приводятся в интервале от oi а до 1Г .
Если быстродействие микропроцессорной системы недостаточно для производства всего объема вычислений, то через блок 7 ввода временного интервала, преобразуюпщй длительность импульса в цифровой код, вводится непосредственно значение угла коммутации и значение угла коммутации в п-м полупериоде определяется экстраполяцией его же предыдущих значений.
Способ управления однофазным инвертором, состоящий в том, что формируют сигнал, пропорциональный углу коммутации, и формируют в соответ- : ствии с этим сигналом импульсы для. отпирания вентилей инвертора в п-м полупериоде питающего напряжения, отличающийся тем, что, с целью улучшения качества регулирования при минимальных углах запаса.
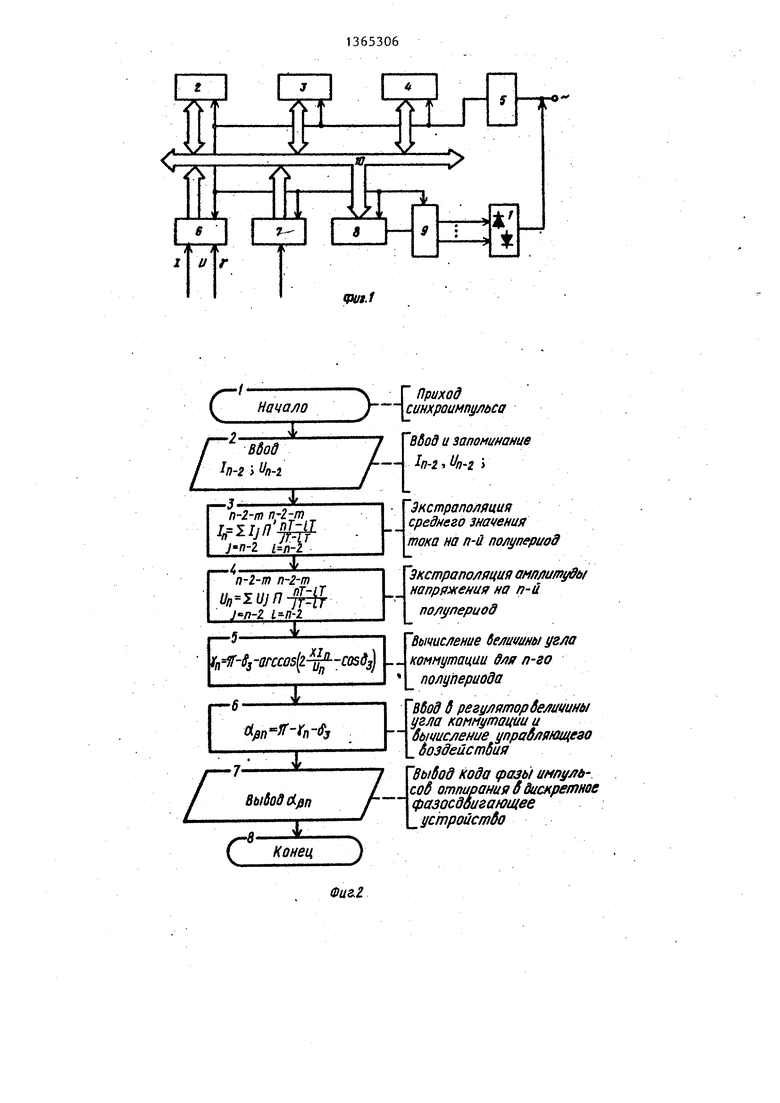
В дальнейшем порядок функционирования 15 измеряют и запоминают .значение амплитакой, как описанный ранее. Это снижает объем вычислений приблизительно в три раза, хотя и уменьшает точность экстраполяции, так как учитывается суммарное действие всех влияющих на угол коммутации факторов, а не каждого в отдельности.
Значение X индуктивного сопротивления контура коммутации, входящего в формулу определения к , определяют эпизодически, например при вхо20
25
туды питающего напряжения и среднее значение тока рекуперации в каждом полупериоде питающего напряжения из интервала (п-2-m), (п-2) , в (п-1)-м полупериоде определяют значение амплитуды питающего напряжения и среднее значение тока рекуперации в п-м полупериоде по формулам
и
тора oifl и оставить величину угла запаса инвертора на прежнем уровне. Формула изобретения
Способ управления однофазным инвертором, состоящий в том, что формируют сигнал, пропорциональный углу коммутации, и формируют в соответ- : ствии с этим сигналом импульсы для. отпирания вентилей инвертора в п-м полупериоде питающего напряжения, отличающийся тем, что, с целью улучшения качества регулирования при минимальных углах запаса.
измеряют и запоминают .значение ампли
туды питающего напряжения и среднее значение тока рекуперации в каждом полупериоде питающего напряжения из интервала (п-2-m), (п-2) , в (п-1)-м полупериоде определяют значение амплитуды питающего напряжения и среднее значение тока рекуперации в п-м полупериоде по формулам
25
и 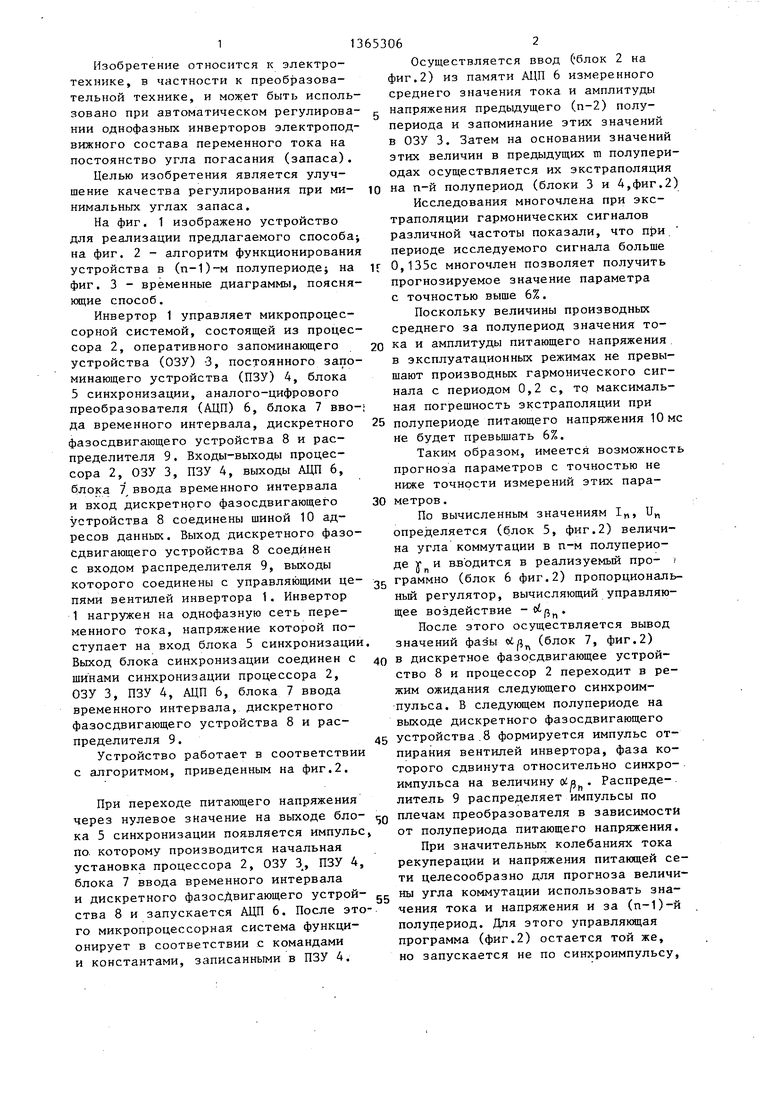
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2207255C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК ТЯГОВЫХ ДВИГАТЕЛЕЙ | 2004 |
|
RU2283784C2 |
| Способ управления многозонным выпрямителем | 1986 |
|
SU1515291A1 |
| Способ регулирования тока в цепи тягового электродвигателя пульсирующего тока | 1986 |
|
SU1359172A1 |
| Способ управления группами параллельных вентильных преобразователей | 1986 |
|
SU1427524A1 |
| Способ управления однофазным инвертором | 1985 |
|
SU1288866A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| Устройство для управления тиристорным инвертором | 1982 |
|
SU1100709A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2004 |
|
RU2262189C1 |
Изобретение относится к электротехнике и может быть использовано при автоматическом регулировании инверторов . Цель изобретения - улучшение качества регулирования при минимальных углах запаса. В данном способе управления однофазнЕлм инвертором определяют значение амплитуды питающ - го напряжения и среднее значение тока рекуперации в соответствии с алгорит- - мом, обеспечивающим возможность прогноза параметров с точностью не ниже точности измерений этих параметров, и вычисляют значение угла коммутации. 3 ил. (Л с:
де в рекуперацию, по известным о;
/i
у. I, и:
X - Coso6,- Cos(oi,p+у ) .
Это может осуществляться фоновой программой, выполняющей, например, функции регулятора скорости, диагностики и т.п., так как скорость про- текания электромагнитных переходных процессов на 2-3 порядка выше скорости ме|санических передвижений электр подвижного состава по участку.
и вычисляют значение угла коммута в п-м полупериоде по формуле
Xln
На фиг. 3 показаны кривые мгновенных значений тока и напряжения инвертора. Уменьшение напряжения сети и увеличение тока рекуперации на интервале тТ могло бы привести к опрокиды- 45 где у - величина угла коммутации, ванию инвертора, однако прогрозирова- ние величины угла коммутации в (п-1) полупериоде на п-й позволяет увели- х , - arccos( - cosS
заданное значение угла за ° са инвертора
индуктивное сопротивление коммутирующего контура.
чить угол отпирания вентилей инверI-
30
где и - значение амплитуды питакщего напряжения; I - среднее значение тока рекуперации}
Т - величина полупериода пита- , ющего напряжения;
П - произведение, исключая j-e
значение,
и вычисляют значение угла коммутации в п-м полупериоде по формуле
где у - величина угла коммутации, х Xln
у - величина угла коммутации, х , - arccos( - cosS j)
- величина угла коммутации, х заданное значение угла запа- ° са инвертора
величина угла коммутации,
индуктивное сопротивление коммутирующего контура.
Щ I
y -11
i
ilriii
Q
r
Нацело
Г вбод 7
I h-2 n-i/-
Г
Bbiioddijan
( Конец у
:
г Лраход
uuHXpouMni//N)Ca
7
/-
Вбод и запоминание
f/7-2 1 -2
Экстраполяция среднего значения
тока на п-й полупериод
экстраполяция амп и/пуды напряжения на п-й
полупериод
Вычисление белтины угла коммутации вля п-го полупериода
вбод 9 регулятор угла коммутации и бычисление упрабляющезо Ьоздейстдия
8ы6од кода (разы импуль- соб отпирания д дискретное фазосдоигающее t/crnpouc/nSo
- гу
j
| Трахтман Л.М | |||
| Электрическое торможение электроподвижного состава.- М.: Транспорт, 1965, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Авторское свидетельство СССР ,№ 819927, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
