:.,; -:./fiP
(2:)n6.::i .(
I 6)0 / , 1) ; , И
./ /; - . . ;
СЗЗ) ./. 7/ i
(.)..n.., / .

| название | год | авторы | номер документа |
|---|---|---|---|
| Грейфер | 1986 |
|
SU1519145A1 |
| Система управления гидравлическим прессом | 1986 |
|
SU1399177A1 |
| Способ контроля качества сварного соединения разнородных металлов | 1986 |
|
SU1380101A1 |
| Формирователь частотно-модулированных сигналов | 1987 |
|
SU1506508A1 |
| Автоматизированная система налива нефтепродуктов | 1987 |
|
SU1515059A1 |
| Подвеска сиденья транспортного средства | 1987 |
|
SU1518161A2 |
| Роторно-конвейерная линия для литья полимерных изделий с центральным резьбовым отверстием | 1989 |
|
SU1634522A1 |
| Устройство для направления бура в скважине | 1945 |
|
SU73765A1 |
| Устройство для подготовки микросхем к монтажу | 1988 |
|
SU1653199A1 |
| Эндоаппарат для восстановления тазобедренного сустава | 1987 |
|
SU1497793A1 |



I 1 ,
;--u:i-i y. : i ), Ue; b : t :
n y.i .;.
f, T - I Ht Hl --I . - : НС.1.,Д: i. 1 ;
П( /: ГП1 ;-;i- :,и : . I
T; РОВ :ЧЬ :
м хан; )- , ; ,
ГНГЖИМ ni-Vfri i I СТИ ;i: G. M :- . i - f. K. - л I j f .- i ITp.yt- l-trl.; :
одним iT HiC 1
H3r;G; Г r : ,( i-T(, строе; ;- Г , j- -Jrif т ги манипугг тс р f i-Tviv; neiiHt-/; ;: , У; - iv ; i-:, i f
ДИаЦИ --, /; u; 7 -1 (, рг:Г| : --(- Cneitl-iriflbH; ; , K- iRnH F. . i I /
ИЛ1; регпнтл, и нлй;и обслужииании ядерного ,Цель изобретен ВИЙ --inep rtTop -i стесненных п- м-;-;: шпх,
На Фи- , S ;.. :г1. ,
П6Щ1 Й йИ/1 , -М 1,
о ::iUHiTrib м::/ .
Ч1 3,;-.-,, f.,i.|.
3
и э ИМПе i llfH .;1Г.- И т . |...;нл;| 7 ДНЯ ги м их э.пеместпн о, : г ь 1- С TCti ил чо,|| р| «-:м - кпр|тусг; 2 i; рл Ci KMHrji-кен i-v-;.Kfly iic,m.MHtn i ;nbi biM t и залг - J . 3 MoxoHi зи , f U-x- MiMaM 6 F HOHijiiniij iHiip рл и iii|- v-i:ei i ме/ -Ду
ЗОДЛЮЦ - М MGXOI inf- ; ( 3 ;ini:il- r HL M
Э фclнc 5 ii пм плпчи с ; о:1ммн/1к.|(: i I-K, Д 1 Г | мitn i pel улирпвки fi fUi/ic je3h Oru: H
втулки 3, )6СТКО 3-lKOfjnjii i M ;iH t-Ui Ht C ri ни)г;ипи корпусе , i n i) i;C3
(, m;ui(.Ki/;c.i : Г.У: luii i: с iiiyriK; } i рг чкиом r Гс1 IM 1 I ,
j гг.-|:гпно 1 I p i.,:iiMi {i)hLM 1Г( H,;ii iJriri- i --ni:i fiT /ni i 7 П мехл1r,-i-h и г; . : - ч- I 1 .
; П ,1 : .;.;,ЦТ- 1 С::М р Н1,Л. ГЦ , Г ., ; MOI i : .р .
Р-./. Ь i6 . l-- , -:
,rCv Г -| --ИИ :-,;Г.-- 71 .
i-(,, I-:. ;;i. i ui,:i . - ииле /и )i-..
и / Г;рС( iv- i i-.
со6(К1 и,илиндр1 И1-:с- У - L;yi ;f- . i.;i : KcM-iCTOy кпию , o;:i i ступс; ь -, У,. ,м па себе оиоггм 1--Ч,ч:ки -ич : Ч1, эи ран 5 с л. 1Пирипт(H-iNt KaMdji ; /
для rti-I l X :, .-, ; У
ступень акжс ,(i/i fpiJti J/ ки гибких элe ннт lR В п и .р( : i-iofn 27. длл контакта с пг)уяипо11,
Стакан 11 имеет рук1 я11:у 3. а резьбов .)й ц|--1пин-др 15 - руног.т ку ,,
Гайка 1 i iiyrii;H4uHi па
цилиндра 1 fi , l- Mt: оу |.:ч;-М 7.Ь .
Д
vH4vi д(1|1С ЛНИ-| ельнпго под- f tiH пружины 13П|;1г тей1)й сустав 14 (ит руко- -:у 27.
сл юистги) (Игтет г:ледую1цим обМ,-;гипуля1Тор пстроип-четсл о пово- Hnii илклоша й фланец (не показан)
;1 гнг:ч | KnfinHi- , при поворотах кото- о иокруг своей оси манипулятор
н .и .лот Р(3 М |НЬ1Р полгичения: оер iji Ы гч,-, 11Г:г. ; О -ic .If- м г ОрИЗО11 I t. И :( ,
При F1CO тик.ильном положеи(.1И Г уетср r aKCiiMnjitiHDe поднятие пру- ; 13 .чехпнилип 6 ура внопе1иирдния. и .щр 13 Г iviooMPM .;1Г1лзоне долж- . Л .... i. I О и in гичнон для :i, irridi ri|.ii п1;1Г1ОЛН нии движения : ( ((1 Uit.viej iax мм) uiiCM iai ора. Воздей1Я
задаю1 - V, у. ,i:ni.o- .. 3 ii пределах его воз- iMi.. сГ;, ;.. у ;i L т liJ s K г полное ко1-1. i.i:; ги/- п.. iicrf ;Ti исполнитель : Ч - ан: u l :Г: i , npui иоздействии
I : : :; if ryrraii in ПрОИСУГ)Д;: Т Об; : Г -о ijr laiiiif дс пс г ( ИИ исполни- . ; M /xntu ; мом Ч .
VI ,. ),- 27 осуцеСТВПЯ ЮТ ПОЕЗО i: Р .., F-i-КПП о 2 вокруг
г. f.i: П Gf в обе стороны и
: : vKi ЯТКИ / / OCj iHOCT ИГ-ЯЮТ
/ .ii/ , :И1 ,:, Hi ПХ--ННИН ( нпепс1 -назад) . н Н.л i K,;;jiijnL i.M положении мани- , t. г,1рл г|1 .л : чаю; R работу механизм /; . ,;к 1 11 1Ч.ЗНИ л , П О ы ор а Ч И ают , 1 -;l, i i цир . пдр 15 против часо : .:;; езьба правая) за руг ... y. i , с |.:11: чиплют его с пеподвиж :, LMyric M ;, попоротом ста. - 11 ;Mi;.. г Г от ..в --асовой стрел- . .-,. -ружину 13, взвеши. 1,- 1-:,м .: i.MK f подвижную часть мани .i-.jiH .тог г ,;сйст;П1Я оказалось 1г ,(м„ К гоч.но, то в дополнение под : ,-..пЮ1 npyuMiv 13 Гмйкой 1 t, вращая ос 3.1 рукоятку 26 по часовой стрел- ;Р: (f t;3b6a правая).
проме уточпых положениях ма- Н лпуллтора необходима регулировка, пружины 13 .широком диапазоне, что спизанг с длиной пружины 13, и что Q|| 13 не; 1еряла устойчивость j она рл..деленг1 на две части пр меху той HOVI ii; X 12, движущейся 1К напра(зл«юи||. П1.
515
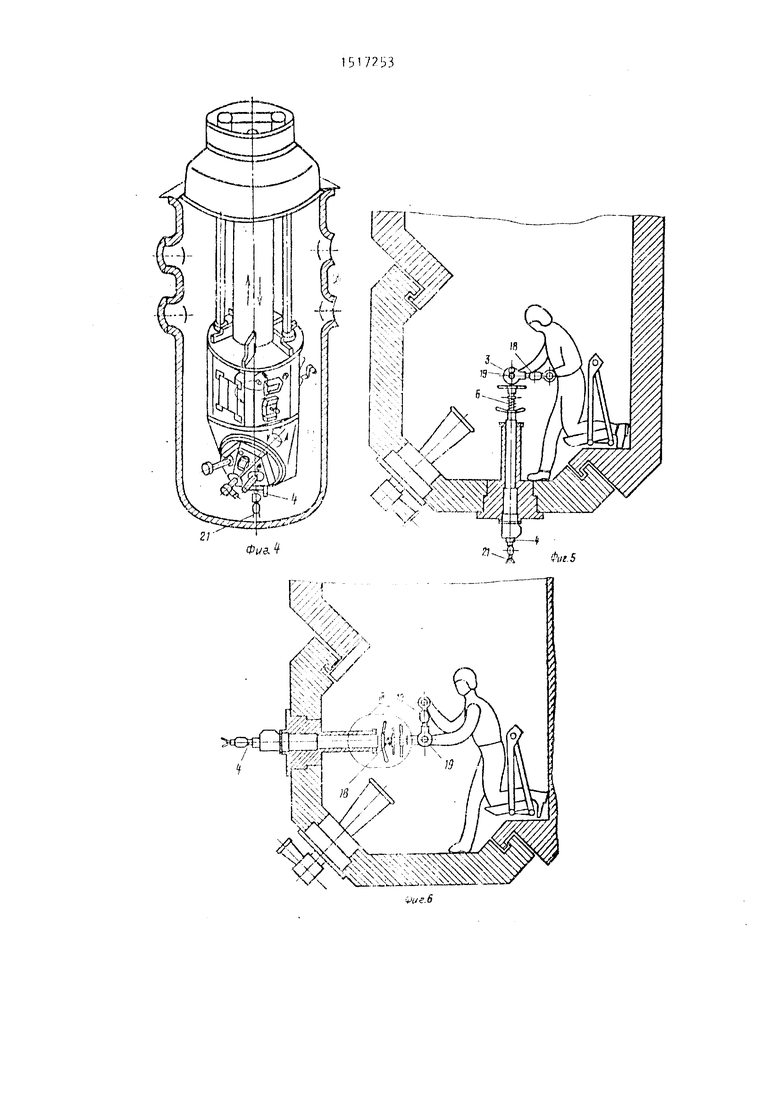
При горизонтальном полои(снии манипулятора необходимо выключить npywHf y 13 f .f:-лиизма уравновешивания из рдОоть, т фиксировать ее в полжатом поло; ении не непол.вижном корпусе 1.
Манипулятор выводят в вертикальное положение поворотом наклонного фланца защитной кабины (возможности самой кабины).
Вращают стакан 11 за рукоятку 23 по часовой стрелке (резьба правая) до упора, освбождают пружину 13. Затем враи1ают гайку 1 за пу - оя ку /6 против часовой стрелки (резьба праьля) до упора, дополнительно с ю /юж/ ают пружину 13, поспе чего ;;о ;11мтю г: из до упора резьбовой цилиндп 15 рукоятку и вращением его по t-,--,сопой стрелке (резьба правая) иаоинчивают на резьбовую втулку 9 Д упора, фиксируя тем самым пружину в поджатом состоянии и выключая ее из работы.
Затем поворотом наклонного фланца защитной кабины выводят манипулятор в горизонтальное положение и вьтолняют необходимые работы, воздействуя па задающий механмз -.
Формула ;зoбps гения
Манипулятор, содержащий -(еподпиж- ный корпус с направляющими, подвижный корпус, установленный в этих.
3
напра ВЛЯЮ1ИИХ , зллаюший и гсполнцтельнь1и механизмы, установленные соответственно на npoTi n irion.v - Mh x KOft- цах подвижного корпуса и к .: - .,-) т киоски связанные друг с друггм гиСЗкин элементом, защитнь й экр-пн, - т, :i ) механизм урлвновешиваимр, о т п и - ч а ю u| и и с я тем, что, с целью
улучшения условий труда оперс тог) i при работе в стеснеинь /. помещениях. он снабжен резьбовым цилиндром, имеющим наружную и внутреннюю резьбы, втулкой, жесткс закрепленной на непод 1)ижном корпусе и имеющей наружную резьбу, стакаг. ом, .пнутрен- нюн резьбу и угтановпеннь1. -5 на наружном резьбе втулки, а на под-тижню) ffopnyce выполие11а иаправлоющая поверхность, на которой уст-лноняен указанный резьбовой иилиндр, причем механизм ураг1новеи иваи1:я выполнеь в виде прукинь, один конец которой жестко закреплен на стакане, а дру
гой взаимодействует с дополнительно введенной гайкой, обралую лей с ре.-ь- бовым цилиндром кинематииескую пару, при этом внутренняя резьба этого резьбового ц - Линдра имеет возможность периодического вааимодейстрия с наружной резьбо11 втулки а резьбовой цилиндр, стакан и гайка снабжен ополнительно введенными рукоятками управления.
Р 27
еэг
.)//( 1
Фиг 2
п
Фид.З
.6
фиг7
