сд
;о
Изобретение oiносится к медицине и ме- лицинекои |ех11ике. а именно к нсихофи- ,1Нчееки м иесле.тоианням.
Цель и:«)б|)е1 ения11о|1ЫН1еиие ючноеги оценки ceiicoMOTopHoii координации.
л1осоо ое lueei |(.1ЯК)т следующим i)6|)a- :u)M.
()нреде,1ЯК) 1 ко. 1ичестно отк. 10Н(. НИ11 о траектории и1данно1 о MajMHfiy ia J, iarevi определяю нш меиные интервалы огклоне НИИ у 111)ан, обьекта oi : раек 0)ии
заданно ) iajMiip ia (Toi, I jj Ц) с учеIOM ei eHeiiH с.южности учае1К1)|, i м к. юиеиия. оиреде. 1ян)1 полно. npt. MH вынолнення 1ада- ния Г при дви/кенни иран.чяемшо об ьек- la но (адаином маршруту и 1:()ямом и об|)атпом напраиденияX е учеюм oi к. юнений о г I рае к тори н м ар тру та. . nm гел iiH вио - дят операции: оцреде.чение суммарной) времени огклоиени 1. уцравляеМ1мо ooiA KTa n l 1 раек|( ia. iaHHoro марн1р |а (время ошибочных .те| |сгвий обел1 дуемого i , оцреде- ,и.л|Ц1 временных ин1 ер алов и суммарно| о времени ( I so нахождения 1)аиляемо| о ооьема 141 I pai K горни .аданносо MapiH|iy- la ( бе оцшоочн1,1х дене | и111 обеде- ()()|, оцреде.к иие времеШ o6e.:ie- при унрав.тении динжеиием об ьек- la но ма)ц|руту, вк.)И1его в себя временных нии риадов ошнбоЧ1Ц)1Х и б(- ЮИШбоЧНЫХ Д1Ч11 1ВЦГ| o6l .IC
. с 1етом ха|1ак1 ерцст|1ки маршру- ;а н c leiieHii . п ,-кнос i и чае1 кон .1КЛ11- мсиия.
11рофессно ; а, ;:,;о ()1е характ( IHKH обсле.1 еми; ), обеспеЧ , ваюшне rii4 цо1 ть ц быстро 111|о|) .leiua Bim. онре. К
. 1) 1. О{ j Be С Tie Н i)eMl lill 6t. 10а1НбоЧ Ь Х Д1. 1 (1ЛН( , В 110ЛНе| |1Я и (Ч(Н10 |)aiHOCT Вр1., l) И бе iO i Ц )6i Ч ) X .Leik TliHii К ()м времени .ц1еиня ада- |П1Я.
11а . 1 ически i.io6|)a/KC ii ,1абцр 1Н ; 1а (} . 2(|). 1Я
с ус poiic (а.
Ус ((1 для ОС у I1U4 В, С 1 Я (.МЮСоба
содержит лабир Н1т 1, датчик ci ap - ( ioii ii). датчнкн Л И 1
ЛеННЯ Д1и1/Ке ИЯ. . Г) S ,
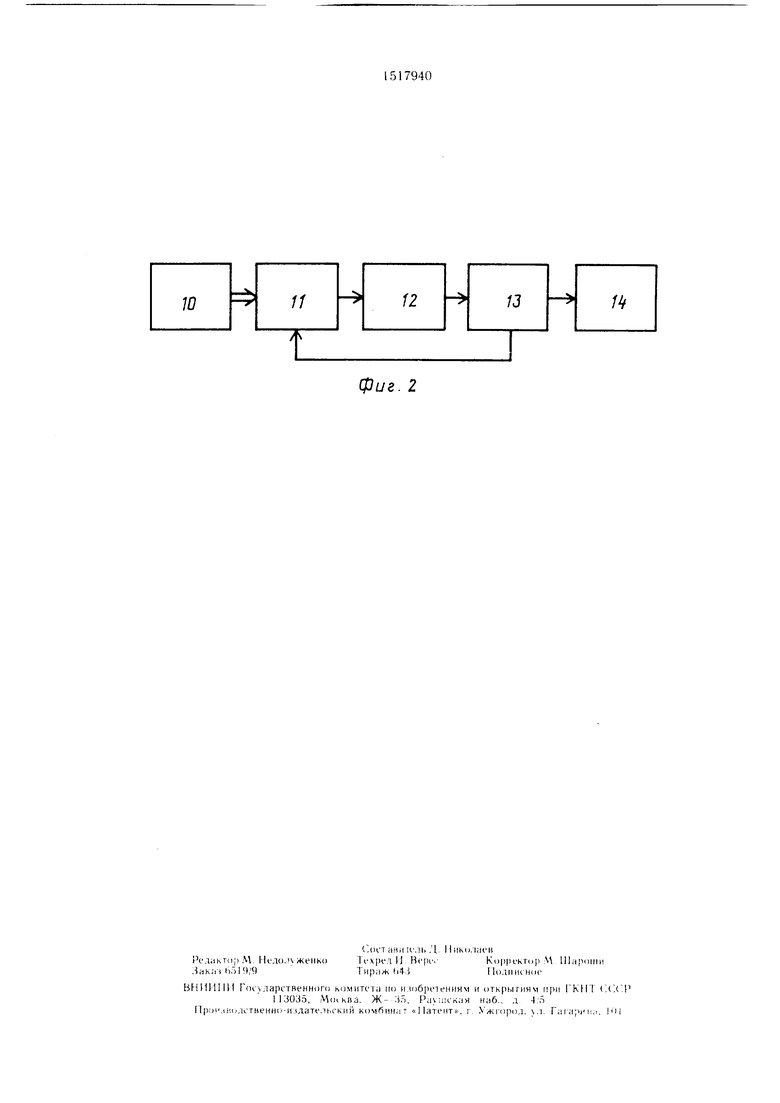
: 1арик I, б.юк 1(1 ), 7 а I ()|1 и. . iH.ia (ip 2 1 1Чд-( датчн| ов, ( I е. 1, 1.1. pel IU pa ор 1 4.
N CI ,Н) Bi) .1. 1Я осу ЦесТ. 1СНИЯ С ОСОба IJU 1НИр 1Д с. |еД И)|И обра.«Л.
iBi..-Ki HH i I ходах Н 1нках la- 1 шарик ) ;оеЛ1 . i е U)io ;.- фо оре iHC I Д111 ЧИК1 б,ока да гЧНКО 1 10, .n, KOIOpu.lX 4epc.f КОМ.у
laiiip II 11-д yaaio н аналн1а о|| 1L сое 41яния ..а ; .икон. uuiuii идш i .х .la т ;:;(. ,Ч, 1Я рас
5
Q
5 |p 5
0
0
5
5
0
чета временных интервалов оншбочны.х и безошибочны.х действий ис 1ытуемого, а также 1олн()го времени тесто вычитатель 13 учитывает 1арные от каждого датчика, кроме датчиков на 1равления движения, т. к. их сигналы елужат для выбора )иииента сложности заданного мар нрута 1 арика и формирования групп сложности туникон, в :1ависимоети от направления движения шарика. Г аечет О 1еноч- ных .характеристик сенсомоторной координа- ироизводится в вычислителе 13, а ре- fy.ibiari) нредс тавляются регистраторе 14.
Форм (/ли изобретения
1.Гл()С()б оценки сенсомоторной коор- динац 1и и о 1редоления ирофесеиональных характеристик О1 ератора путем оиределеиия ко. ичества {. отк. юнений от траекторий ( маршрута, временных интерва.тов откло 1ени11 ).1яемого обьекта от траек- ори11 N apHipyT;: (Тт , Тог ....Т,,,) с учетом стененн с,ожности траектории, полного вре- . нения задания при движении у цраиляемо|Ч) оГ)1)екта но заданному мар- 1 нрямом и обратном нанравле- ниях. отличающийся тем, что, с 1.е,пью точ)ости, (Х 1нительно онреде1ЯК) время Т )1пибочнь х / .ействий при и, задан 1Я, время безошибочных действи ТБО и время Т, вк.1К)чак.)цее в себя сумму временных инк рна. юн оши- бочш; х и безо ибочнь х де( с учетом характера унравляемог о об ь- екк н степени сл(1жности мари1рута, 1ри этом ct. HcoMOTopHoii координа 1ии осушест- 1о ()шеник) Т. к полному вре- в1.о,нения , а нрофессио- на. .11 ачнмые характеристики оператора о р1 де,Я)т но ог О неник) времени безошибоЧ1 Ь Х Де11СТ и11 К полному BjU MeHH BbHUh b
.(ада1Н1я и отноп1еник) 1азноети вре- о 11ибоч1 ых И бе.нш цбочН,гх действий к 1о.ному време 1и вы 1олнения задания.
2.Ус1ройсг и) для оценки сенсомотор- () чОорди1 а и1и И онределения нрофесси- онал1 н,1х характеристик онератора , содержа- HU e .1абирин1 с N iO -o4Hc;ieHHbiMH ходами, o)(, туниками, старт-финишную нози- . 1арик, датчики, вм()нтированнь е в
ц в СТарТ-(})) ),
ычислите,ь, выход которого соедине с PIM ис ра гором, отличающееся тем. что в него введены коммутатор, выход которого сое динеи с входом ана.тизатора, два датчика 1а 1равления Д и1жения 1арика в лабири)- ге, ричем все датчики выно,1Н .ны бес- K(JH актными, а их ,:11) выходы 1одк,1К) к входам коммутатора, адрес ый вход коюрого соед1Ц|ен с втор1,1м выходом вычис.чи ге.чя, а вход вычислите,я
СОг.иШеН с Ь ХОДОМ а Н а. О)а СОСГОЯ 1ИЙ
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для встроенного контроля логических блоков | 1986 |
|
SU1392569A1 |
| Способ исследования колебаний кровеносных сосудов | 1986 |
|
SU1424800A1 |
| Устройство для психологических исследований | 1984 |
|
SU1171010A1 |
| Устройство для оценки сенсомоторной координации | 1983 |
|
SU1159554A1 |
| Калибратор фазовых сдвигов | 1985 |
|
SU1277015A1 |
| СПОСОБ ОЦЕНКИ ОПЕРАТОРСКОЙ ДЕЯТЕЛЬНОСТИ ПО УПРАВЛЕНИЮ ОБЪЕКТОМ | 2003 |
|
RU2254050C2 |
| Способ регенерации бурового раствора и устройство для его осуществления | 1982 |
|
SU1100407A1 |
| Устройство для профессионального отбора и начального обучения операторов систем слежения | 2016 |
|
RU2646395C1 |
| Устройство для контроля параллельности | 1986 |
|
SU1402804A1 |
| Способ настройки вентильного электродвигателя | 1986 |
|
SU1415349A1 |
Изобретение предназначено для психофизиологических исследований и профессионального отбора. Цель изобретения - повышение точности. Определяют количество отклонений от траекторий заданного маршрута, временные отклонения управляемого объекта от траектории маршрута с учетом степени сложности траектории и полное время выполнения задания при движении управляемого объекта по заданному маршруту. При выполнении задания регистрируют время ошибочных действий, время безошибочных действий и время /TX/, включающее в себя сумму временных интервалов ошибочных и безошибочных действий с учетом характера маршрута и его сложности. Оценивают сенсомоторную координацию по отношению времени TX к полному времени выполнения задания. Устройство содержит лабиринт 1, датчик 2 старт-финишной позиции, датчики 3 и 4 направления движения, датчики 5,6,7 и 8 тупиков, шарик 9, блок датчиков, коммутатор, анализатор состояния датчиков, вычислитель, регистратор. Изобретение позволяет распределить операторов одной специальности по рабочим местам с различной интенсивностью психической нагрузки. 2 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| ЛАетолические рекомендации по профессионально-психологическому отбору кандидатов в летное училище гражданской авиации | |||
| Л.; Воздушный транспорт | |||
| МГ.А, 1978. | |||
