Изобретение относится к медицинской технике, в частности к средствам оценки деятельности оператора, и может быть использовано для оценки качества операторской деятельности пилота в процессе его работы на тренажере или при управлении воздушным судном.
В настоящее время, анализируя статистику летных происшествий, видно, что 85% летных происшествий происходит за счет человеческого фактора и только 15% за счет техники. Поэтому актуальной является задача повышения надежности функционирования человеческого звена в биотехнической системе пилот-воздушное судно. Задача надежности решается за счет конструирования самолетов на принципе адекватности согласования "управленческих" характеристик технических и биологических элементов системы и принципа идентификации информационной среды, требующей оптимизации интенсивности потоков и формы предъявления информации, которой в процессе функционирования обмениваются технические и биологические элементы системы.
Отечественный и зарубежный опыт, реализующий задачу повышения надежности системы пилот-воздушное судно, свидетельствует о необходимости применения объективных оценок работоспособности пилота, его психофизиологического состояния, а также оценки физиологической стоимости операторской деятельности для оценки операторской деятельности. Основная цель этих оценок заключается в выявлении внутренних резервов и снижении нагрузок на пилота, в более точном анализе пилотной динамики освоения новой техники и ее усовершенствования с учетом динамики полета. В условиях тренировочного процесса эти оценки позволяют скорректировать методы и объемы тренировок для отдельных процедур тренировочного задания, объективно оценить качество проведения тренировки на основе результатов операторской деятельности, выявить критические ситуации, связанные с состоянием пилота, при моделировании летных происшествий.
Известен способ оценки операторской деятельности (SU 2131701 С1, МПК А 61 В 5/16, 1999), заключающийся в установлении датчиков на органы управления технического средства и на систему отображения, тестирования методом сравнения времени действительных реакций оператора с эталонными и оценке качества операторской деятельности по отношению этих времен. Оператор во время тестирования воздействует на органы управления. Благодаря датчикам, расположенным на органах управления, определяется время сенсомоторной реакции, по которому вычисляется пригодность оператора к деятельности. В состав операторской деятельности как то: быстрое движение к кнопке и ее нажатие, вождение автомобиля и самолета, наблюдение за химическими процессами, работа на сборочной линии, настройка радиоприемника на нужную станцию, - входит процесс управления объектом. В данном способе оценки операторской деятельности учет составляющей непрерывного управления (слежение за объектом управления) отсутствует. Поэтому недостатком данного способа является то, что он обеспечивает лишь оценку моторных реакций оператора и при этом отсутствует оценка действий оператора по непрерывному управлению за объектом управления (слежение).
Известен способ оценки операторской деятельности (SU 2170953, С1, МПК А 61 В 5/16, 2000), заключающийся в регистрации психофизиологических параметров пилота и оценке состояния оборудования пилота для формирования сигнала нештатной ситуации. Для оценки состояния пилота используется блок измерения медицинских параметров и функциональных параметров, где использованы датчики, которые фиксируют обжатие ручки управления, усилие обжатия, траекторию движения ручки управления, положение и траекторию движения головы, усилий упора ног, легочной вентиляции, давления кислорода, качества смеси, термоанемометрию, пневмометрию, текущую и опасную высоту, перегрузку, состояние шасси и время реакции. При отклонении от нормы сигналов с датчиков во время полета блок анализа передает информацию пилоту об угрозе. Последний должен в ограниченное время устранить нештатную ситуацию. По времени устранения оценивается операторская деятельность - профессиональная пригодность. При превышении допустимого времени осуществляется перевод самолета в горизонтальную плоскость полета на безопасной высоте. В данном способе отсутствует оценка наиболее важной составляющей операторской деятельности - действия пилота по непрерывному управлению объектом. По существу, из-за отсутствия непрерывной оценки качества управления объектом пилот получает информацию о плохом управлении воздушным судном в момент возникновения угрожающей ситуации. В этот момент он испытывает дефицит времени на принятие решений. При непрерывном предъявлении информации о качестве управления (слежения) этих ситуаций можно было бы избежать.
Другими словами, данный способ не обеспечивает оценку основной составляющей операторской деятельности пилота - качества непрерывного управления объектом.
Наиболее близким к настоящему изобретению по технической сущности и достигаемому результату при использовании является способ оценки качества операторской деятельности по управлению объектом (Методическое руководство по организации и проведению психофизиологических обследований персонала энергетических предприятий (РД 153-34.0-03.504-00) - М.: Минздрав РФ, Минтопэнерго РФ, РАО "ЕЭА России", 2000, пункт 2.12.2, см. Приложение), заключающийся в том, что предварительно измеряют на большой популяции людей время сенсомоторной реакции на стимул, который является многоальтернативным, и вычисляют среднее значение параметров сенсомоторной реакции на стимул, в процессе управления объектом измеряют параметры сенсомоторной реакции оператора на последовательно предъявляемый стимул и вычисляют нормированные значения параметров сенсомоторной реакции на стимул, а операторскую деятельность оценивают по интегральному показателю К, который определяют как среднее геометрическое нормированных значений параметров сенсомоторной реакции на стимул. Значения нормированных параметров сенсомоторной реакции на стимул определяют по нормативно-оценочным шкалам. Интегральный показатель качества К операторской деятельности вычисляют следующим образом

где Nt, Nσ и No - нормированные значения соответственно времени реакции, его среднеквадратичного отклонения и количества ошибочных действий.
Для оценки времени реакции используют многоальтернативный стимул, например, зрительной модальности. Многоальтернативный стимул имеет свои особенности. При сенсомоторной реакции выбора из нескольких альтернатив - точная реакция на случайную последовательность световых стимулов (красный, зеленый, синий) - такие статистические характеристики, как среднее время реакции, среднеквадратичное отклонение определяются числом альтернатив, а не ее характером (цвет). Альтернативы, составляющие такой многоальтернативный стимул, называются простыми.
Способ-прототип обеспечивает оценку качества операторской деятельности только на основе одной ее составляющей - сенсомоторной реакция на стимул. Для широкого круга операторской деятельности, в том числе и для пилотной, важной составляющей является непрерывное управление объектом. Поэтому для таких видов деятельности необходимо учитывать обе составляющих операторской деятельности: дискретную (зрительно-моторной реакция на световой стимул, включение/выключение кнопок, тумблеров, рычагов) и непрерывную (компенсаторное слежение для управления полетом воздушного судна).
Недостатком способа-прототипа является то, что он обладает ограниченными функциональными возможностями, поскольку может обеспечивать оценку операторской деятельности для тех видов деятельности, где отсутствует непрерывная составляющая управления объектом.
Задача, на решение которой направлено данное изобретение, заключается в создании способа, обеспечивающего учет параметров непрерывной составляющей управления объектом в оценке операторской деятельности.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в расширении функциональных возможностей способа оценки операторской деятельности за счет одновременного учета непрерывной и дискретной составляющих процесса управления объектом.
Поставленная задача с достижением упомянутого выше технического результата решается тем, что в способе оценки операторской деятельности по управлению объектом, заключающемся в том, что предварительно измеряют на большой популяции людей время сенсомоторной реакции на стимул, который является многоальтернативным, и вычисляют среднее значение параметров сенсомоторной реакции на стимул, в процессе управления объектом измеряют параметры сенсомоторной реакции оператора на последовательно предъявляемый стимул и вычисляют нормированные значения параметров сенсомоторной реакции на стимул, в процессе управления объектом дополнительно измеряют значения параметров непрерывного управления объектом и вычисляют их нормированные значения, а операторскую деятельность оценивают по интегральному показателю качества, который определяют как среднее геометрическое нормированных значений параметров сенсомоторной реакции на стимул и нормированных значений параметров непрерывного управления объектом.
Поставленная задача решается также тем, что осуществляют следующие действия.
В качестве простых альтернативных составляющих для многоальтернативного стимула выбирают альтернативные составляющие с одинаковыми статистическими характеристиками.
Для воздушного судна в качестве простых альтернативных составляющих стимула выбирают полетные ситуации, определяемые показаниями индикаторов скорости, высоты полета и информационных табло.
В качестве параметров сенсомоторной реакции выбирают время сенсомоторной реакции на стимул t и среднеквадратичное отклонение времени сенсомоторной реакции на стимул σ, а их нормированные значения соответственно Nt и Nσ определяют из соотношений
где  - время сенсомоторной реакции на стимул, усредненное по большой популяции людей,
- время сенсомоторной реакции на стимул, усредненное по большой популяции людей,
 - среднеквадратичное отклонение времени сенсомоторной реакции на стимул, полученное по большой популяции людей.
- среднеквадратичное отклонение времени сенсомоторной реакции на стимул, полученное по большой популяции людей.
В качестве параметров непрерывного управления воздушным судном выбирают текущее отклонение от заданной высоты полета ΔН и линейное боковое уклонение от линии заданного пути ЛБУ, а их нормированные значения соответственно Nh и Ns определяют из соотношений


где ΔНmaх - пороговое отклонение по высоте, зависящее от высоты полета воздушного судна,
Pd - пороговое значение ЛБУ, зависящее от этапа полета воздушного судна,
Abs - функция получения модуля значения.
Значение параметра ΔНmaх для определения нормированного значения отклонения от заданной высоты полета выбирают исходя из условий:
ΔНmaх=60 м для Н>300 м,
ΔНmaх=0.2*Н для Н≤300 м,
где Н - текущая истинная высота полета,
а значение параметра Pd для определения нормированного значения ЛБУ выбирают исходя из условий:
Pd=1852 м - на этапе взлета и полета в районе аэродрома,
Pd=2*1852 м - на этапе полета по маршруту,
Pd=0.5*1852 м - на этапе захода на посадку.
Интегральный показатель качества операторской деятельности пилота воздушного судна Q определяют как среднее геометрическое нормированного значения времени сенсомоторной реакции на стимул Nt, нормированного среднеквадратичного отклонения времени сенсомоторной реакции на стимул Nσ, нормированного отклонения от заданной высоты полета Nh и нормированного линейного бокового уклонения от линии заданного пути Ns из соотношения

Эти дополнительные операции являются отличительными признаками заявляемого способа относительно прототипа.
Новизна настоящего изобретения заключается в одновременном учете непрерывной и дискретной составляющих процесса управления объектом для оценки операторской деятельности по управлению объектом.
Изобретение иллюстрируется чертежом, на котором представлен график изменения показателя качества операторской деятельности при управлении полетом воздушного судна на тренажере.
В реальных условиях статистические характеристики многоальтернативного стимула зависят от характера альтернативы. Для разных альтернатив средние времена реакций могут различаться на порядок. Поэтому при формировании многоальтернативного стимула выбирают простые альтернативы с одинаковыми статистическими характеристиками. Такое формирование многоальтернативного стимула позволяет рассчитывать его статистические характеристики независимо от альтернативы.
Осуществление предлагаемого способа рассмотрим на примере оценки операторской деятельности пилота воздушного судна. В процессе управления воздушным судном у пилота могут быть возникнуть различные ситуации, на которые требуется однозначная реакция. Совокупность этих ситуаций описывается многоальтернативным стимулом. В качестве примера приведены таблицы с набором нештатных ситуаций для вертолета Ми-8МТВ (табл.1) и штатных ситуаций для самолета Ту-154 (табл.2). В этих таблицах приведены альтернативы многоальтернативного стимула (поле: ситуация) и им приведены в соответствие реакции пилота на соответствующие ситуации (поле: действие). Как видно из табл.1 и 2, альтернативная составляющая стимула, представляющая собой полетную ситуацию, определяется показаниями индикаторов скорости, высоты полета и информационных табло. Для каждой составляющей стимула определена соответствующая реакция пилота на включение/выключение определенных тумблеров, кнопок и рычагов. После принятия решения по данной ситуации пилот осуществляет операторскую деятельность по включению/выключению органов управления. В качестве параметров сенсомоторной реакции пилота на стимул выбирают время реакции и его среднеквадратичное отклонение. Одновременно с дискретным управлением воздушного судна: включение/выключение, - пилот осуществляет непрерывное управление воздушным судном: поддержание заданной высоты полета и траектории движения.
Способ осуществляют следующим образом.
Предварительно измеряют на большой популяции людей время сенсомоторной реакции на стимул, который является многоальтернативным, и вычисляют среднее время сенсомоторной реакции  и его среднеквадратичное отклонение
и его среднеквадратичное отклонение  , в процессе управления объектом измеряют время сенсомоторной реакции оператора на последовательно предъявляемый стимул ti, вычисляют среднеквадратичное отклонение времени сенсомоторной реакции на стимул σ и нормированные значения параметров сенсомоторной реакции на стимул.
, в процессе управления объектом измеряют время сенсомоторной реакции оператора на последовательно предъявляемый стимул ti, вычисляют среднеквадратичное отклонение времени сенсомоторной реакции на стимул σ и нормированные значения параметров сенсомоторной реакции на стимул.
Время сенсомоторной реакции ti определяют как временную задержку между предъявлением информации на индикаторе (табло) и изменением состояния соответствующего органа управления (кнопка, тумблер, рычаг). На основе накопленных данных о времени сенсомоторной реакции на стимул определяют выборочную оценку среднеквадратичного отклонения времени сенсомоторной реакции σ по формуле (Вайнберг Дж., Шумекер Дж. Статистика. /Пер. с англ. Л.А.Клименко и Б.И.Клименко, М.: Статистика, 1979. - С.199).
где n - число накопленных значений времени сенсомоторной реакции;
i - среднее значение времени сенсомоторной реакции по полученной выборке.
Нормированные значения времени сенсомоторной реакции Nt и его среднеквадратического отклонения Nσ в отличие от прототипа определяют из соотношений (2) и (3).
В процессе управления воздушным судном одновременно определяют параметры непрерывного управления объектом, в качестве которых выбирают навигационные параметры воздушного судна. Для обеспечения безопасности самолетовождения (полет на заданном эшелоне и в пределах разрешенного коридора) наиболее значимыми навигационными параметрами является отклонение от заданной высоты ΔН и линейное боковое уклонение от линии заданного пути ЛБУ.
Отклонение от заданной высоты полета ΔН рассчитывается как разность между фактической высотой полета Нф и заданной высотой полета Нз

Значение ЛБУ в навигационном вычислителе рассчитывается как произведение расстояния, пройденного от последнего поворотного пункта маршрута Snp, на тангенс угла, получаемого как разность заданного (ЗМПУ) и фактического магнитных путевых углов (ФМПУ) (Черный М.А, Кораблин В.И. Воздушная навигация, М.: Транспорт, 1983. - С.192)

Затем определяют нормированные значения параметров непрерывного управления объектом.
Согласно правилам полета на эшелоне считается допустимым отклонение ΔНmах от заданной высоты на ±60 м, а при снижении вдоль линии глиссады или взлете допустимое отклонение от заданной высоты составляет 20% от текущей высоты над землей. На границе допустимого отклонения от высоты (±ΔНmах) нормированный показатель принимаем равным 1. За пределами границ нормированный показатель изменяется по соотношению

где ΔНmах=60 м для текущих истинных высот более 300 м и ΔНmах=0.2*Н для высот равных и менее 300 м, где Н - текущая истинная высота полета.
Согласно правилам зональной навигации (Рекомендации по подготовке воздушных судов и эксплуатации гражданской авиации России к полетам в системе точной зональной навигации Р-RNAV в Европейском регионе по требованиям RNP 1, М.: ГСГА, Россия - 2002) суммарная погрешность самолетовождения не должна превышать значения ±RNP в течение 95% полетного времени на любом участке маршрута. Значение RNP, в обобщенном случае, можно считать равным: 7552 м (1 морской миле (п.т.) на этапах взлета и полета в районе аэродрома, 3704 м (2 п.т.) на этапе полета по маршруту и 926 м (0.5 п.т.) на этапе захода на посадку.
Установим пороговое значение коридора Pd для линейного бокового уклонения равным RNP. На границе допустимого уклонения ЛБУ (±Pd) нормированный показатель Ns принимаем равным 1. За пределами границ нормированный показатель Ns изменяется по соотношению
где Pd - пороговое значение ЛБУ, зависящее от этапа полета воздушного судна.
На основании полученных нормированных значений Nt, Nσ, Nh, Ns соответственно из выражений (2, 3, 10 и 11) определяют интегральный показатель качества операторской деятельности пилота Q из соотношения (6)

Предлагаемый способ может быть использован для оценки операторской деятельности по управлению объектами различного назначения. При оценке операторской деятельности по управлению объектом другого типа выбирают параметры дискретной и непрерывной составляющих операторской деятельности, значимые для данного типа объекта, и вычисляют интегральный показатель качества Q из соотношения

где Ni - i-параметр операторской деятельности,
n - общее число дискретных и непрерывных параметров операторской деятельности.
Получение значений Nt и Nσ определяется наличием операторской деятельности по включению/выключению клавиш, тумблеров и рычагов. Отсутствие такой деятельности в течение длительного времени не позволяет получить текущие значения Nt и Nσ. Поэтому для определения значений Nt и Nσ следует использовать временное окно. При отсутствии сенсомоторных реакций на стимул в начале операторской деятельности следует приравнять значения Nt и Nσ единице. В процессе деятельности может возникнуть такая ситуация, когда отсутствуют сенсомоторные реакции на стимул в рамках временного окна, в этом случае следует использовать предыдущие значения Nt и Nσ.
Размер временного окна выбирают из условия получения данных о текущих изменения функционального состояния пилота. В одном случае данные могут быть нивелированы, в другом - может быть большой шумовая составляющая этих данных. Практически, для отслеживания изменений функционального состояния оператора выбирают окно в диапазоне от 2 до 5 минут.
Аналогично выбирают окно и для определения текущих значений отклонения по высоте полета и линейному боковому уклонению. При отсутствии значений последних по каким-либо причинам, например при нахождении воздушного судна на земле, значения Nh и Ns следует приравнять единице.
Способ может быть осуществлен с помощью устройства, содержащего датчики времени сенсомоторной реакции пилота на многоальтернативный стимул и навигационный вычислитель, выходы которых соединены соответственно с входами блока ввода информации, выход которого соединен через блок обработки информации с индикатором. Датчики времени определяют время сенсомоторной реакции как временную задержку между предъявлением информации на индикаторе (табло) и изменением состояния соответствующего органа управления (кнопка, тумблер, рычаг). Навигационный вычислитель (например, Новичков Н. Бортовая авионика фирмы "ТРАНЗАС" повысит экспортный потенциал вертолетов МИ-172// В журн. Рынки вооружений// т.2, №6-7, 2002. - С.7-9 или Стулов А.В. Эксплуатация авиационного оборудования спутниковой навигации. - М.: Воздушный транспорт, 2002. - С.70) осуществляет вычисление текущих значений отклонения от заданной высоты полета ΔН, допустимого отклонения от высоты ΔНmax, линейного бокового уклонения ЛБУ и его порогового значения Pd на борту воздушного судна. Блок обработки информации осуществляет хранение предварительно полученных данных, накопление текущих данных и вычисление показателя качества операторской деятельности. В качестве блока обработки информации и индикатора может быть использован компьютер с процессором уровня Pentium.
Операторская деятельность, где основным компонентом является сенсомоторная реакция, характеризуется набором дискретных стимулов (индикаторы, табло) и ответов (кнопки, рычаги). В этой деятельности оператор реагирует на определенное число дискретных состояний системы. В деятельности, связанной с непрерывным управлением объектом, оператор должен реагировать на непрерывно меняющуюся ситуацию (движение объекта управления). Эти два самостоятельных вида деятельности. Скорость нажатия на кнопки ничего не говорит о функциональной подготовке оператора в области компенсаторного слежения. Способ-прототип нечувствителен к качеству управления объекта, не позволяет оценить специфику операторской деятельности на воздушном судне и поэтому его использование для этого класса задач функционально ограничено. Сфера применения предложенного способа оценки операторской деятельности захватывает все сферы операторской деятельности, где основными составляющими деятельности являются сенсомоторная реакция на стимул и непрерывное управление объектом.
Для иллюстрации работоспособности предлагаемого способа на чертеже представлен график изменения показателя качества операторской деятельности пилота на тренажере при управлении полетом вертолета Ми-8МТВ в течение 4 часов.
Следует отметить, что оценка среднего качества операторской деятельности пилота равна 7 и поэтому, исходя из графика, можно сказать, что, примерно 40% полетного времени качество операторской деятельности по управлению воздушным судном было ниже среднего. Контроль динамики показателя качества операторской деятельности позволяет прогнозировать и предупреждать аварийные и внештатные ситуации при чрезмерных уменьшениях значений показателя качества операторской деятельности.
Использование в определении показателя качества операторской деятельности операции нормирования для параметров сенсомоторной реакции и параметров управления объектом позволяет сравнивать деятельность пилотов, работающих на различных типах воздушных судов, получать рейтинг пилотов по качеству вождения воздушного судна и получать ранее несравнимые характеристики: какой из пилотов является лучшим.
ДВ";
ДВ";
ДВ";
(в облачности или при t<10°);
Изобретение относится к медицине, в частности к средствам оценки деятельности, и может быть использовано для оценки операторской деятельности по управлению объектом. Способ включает измерение на большой популяции людей время сенсомоторной реакции на стимул и вычисление среднего значения параметров сенсомоторной реакции на стимул. В процессе управления объектом измеряют параметры сенсомоторной реакции оператора на последовательно предъявляемый стимул и вычисляют нормированные значения параметров сенсомоторной реакции на стимул. В качестве простых компонент для многокомпонентного стимула выбирают компоненты с одинаковыми статистическими характеристиками параметров сенсомоторной реакции. В процессе управления объектом дополнительно измеряют значения параметров непрерывного управления объектом и вычисляют их нормированные значения. Операторскую деятельность оценивают по интегральному показателю качества, который определяют как среднее геометрическое нормированных значений параметров сенсомоторной реакции на стимул и нормированных значений параметров непрерывного управления объектом. Способ позволяет обеспечить одновременный учет непрерывной и дискретной составляющих процесса управления объектом. 5 з.п. ф-лы, 1 ил., 2 табл.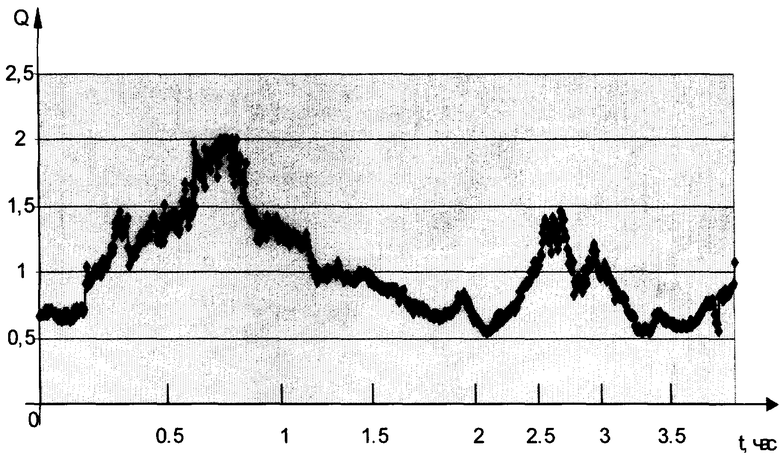


где  -время сенсомоторной реакции на стимул, усредненное по большой популяции людей;
-время сенсомоторной реакции на стимул, усредненное по большой популяции людей;
 - среднеквадратичное отклонение времени сенсомоторной реакции на стимул, полученное по большой популяции людей.
- среднеквадратичное отклонение времени сенсомоторной реакции на стимул, полученное по большой популяции людей.
где ΔHmax - пороговое отклонение по высоте, зависящее от высоты полета воздушного судна;
Pd - пороговое значение ЛБУ, зависящее от этапа полета воздушного судна;
Abs - функция получения модуля значения.
ΔHmax=60 м для Н>300 м,
ΔHmax=0,2·Н для Н <300 м,
где Н - текущая истинная высота полета, а значение параметра Pd для определения нормированного значения ЛБУ выбирают, исходя из условий:
Pd=1852 м - на этапе взлета и полета в районе аэродрома,
Pd=2·1 852 м - на этапе полета по маршруту,
Pd=0,5·1852 м - на этапе захода на посадку.

| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНЫМ И ФИЗИОЛОГИЧЕСКИМ СОСТОЯНИЕМ ЛЕТЧИКА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2000 |
|
RU2170953C1 |
| ФРОЛОВ М.В | |||
| Контроль функционального состояния человека-оператора | |||
| - М., 1987, с.122-132 | |||
| СПОСОБ И УСТРОЙСТВО ЭКСПРЕСС-ОЦЕНКИ РАБОТОСПОСОБНОСТИ ЧЕЛОВЕКА-ОПЕРАТОРА В ПРОИЗВОДСТВЕННЫХ УСЛОВИЯХ, ПРИ ЭКОЛОГИЧЕСКИ НЕБЛАГОПРИЯТНЫХ ВОЗДЕЙСТВИЯХ И РЕАБИЛИТАЦИИ ПОСЛЕ ТРАВМ И ЗАБОЛЕВАНИЙ | 1998 |
|
RU2164075C2 |
| Устройство для оценки и тренировки операторов | 1990 |
|
SU1774368A1 |

