ел
00
со
315181
колеса 6, являясь водилами, вращают валы 7 и вместе с ним сателлиты 8, которые дополнительно вращаются от зацепления с неподвижным зубчатым ко- лесом 12. От сателлитов 11 движение передается пальцам кривошипа 13, а от них тягам - стержням 1 и пильной рамке 15. Передаточное отношение зубчатых колес ведущего (входного) пла- ю нетарного механизма в 1,5 раза больше передаточного отношения зубчатых колес ведомого выходного планетарного механизма, у которого передаточное отношение зубчатых колес равно двум. Одно 15 из зубчатых колес ведомого планетар9
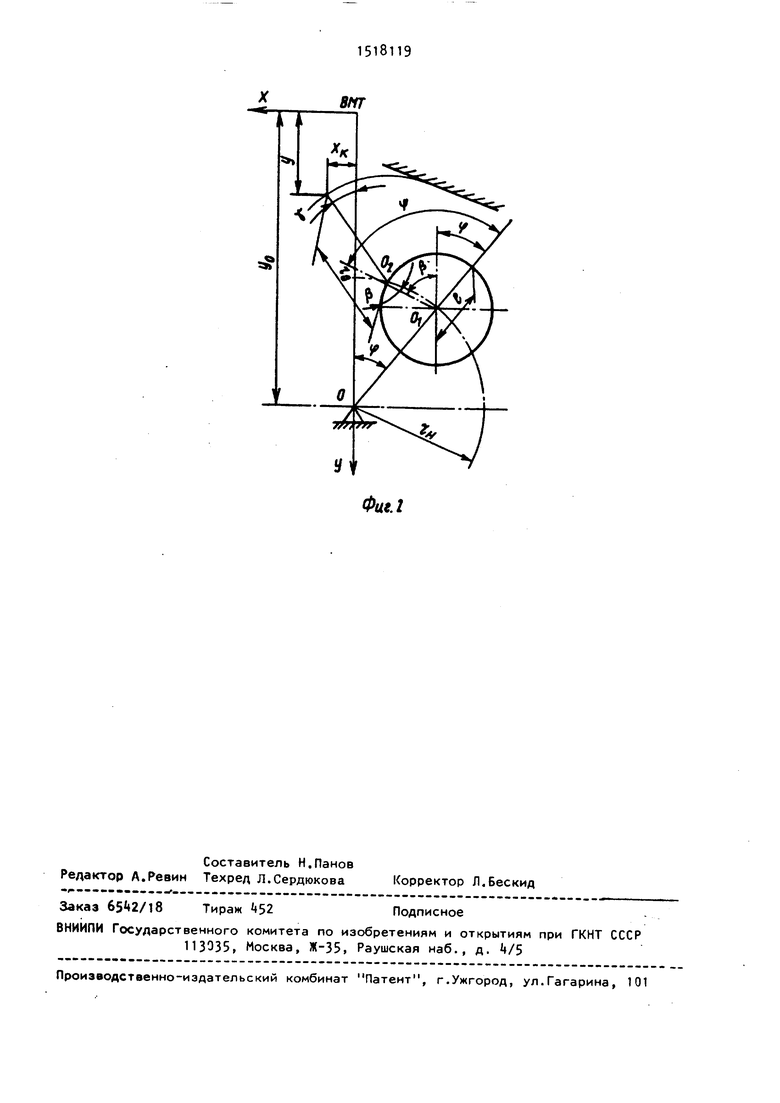
него механизма выполнено с радиусом начальной окружности, определяемым по выражениям г -t-y , x(,),
1 sinZi-f; у(гк-Гу)соз lcos24 , где г „ - радиус начальной окружности некруглого зубчатого колеса; х - абсцисса точек этой окружности данного колеса; у - ордината точек этой окружности данного колеса; г к - радиус начальной окружности круглого колеса; 8и длина водила входного планетарного механизма; 1 - длина водила сателлита выходного планетарного механизма; I/ - угол поворота водила входного планетарного механизма. 2 ил.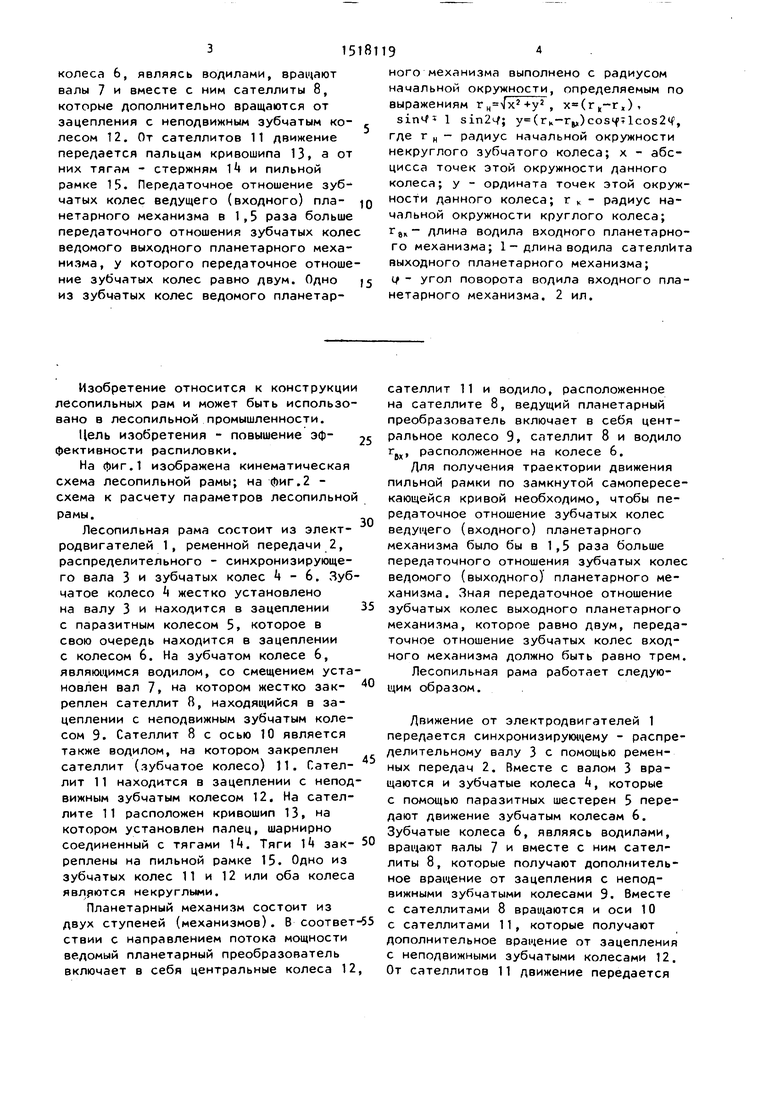
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи лесопильной рамы | 1987 |
|
SU1498611A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| ПРЕОБРАЗУЮЩИЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 2001 |
|
RU2193127C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1994 |
|
RU2057005C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| Бурильная машина | 2002 |
|
RU2224076C1 |
| Лесопильная рама | 1991 |
|
SU1831418A3 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Лесопильная рама | 1982 |
|
SU1065189A1 |
Изобретение относится к конструкции лесопильных рам и может быть использовано в лесопильной промышленности. Цель изобретения - повышение эффективности распиловки. При вращении вала 3 от электродвигателей 1 и ременных передач 2 вращаются и зубчатые колеса 4, которые находятся в зацеплении с колесами 5 и 6. Зубчатые колеса 6, являясь водилами, вращают валы 7 и вместе с ним сателлиты 8, которые дополнительно вращаются от зацепления с неподвижным зубчатым колесом 12. От сателлитов 11 движение передается пальцам кривошипа 13, а от них тягам - стержням 14 и пильной рамке 15. Передаточное отношение зубчатых колес ведущего (входного) планетарного механизма в 1,5 раза больше передаточного отношения зубчатых колес ведомого выходного планетарного механизма, у которого передаточное отношение зубчатых колес равно двум. Одно из зубчатых колес ведомого планетарного механизма выполнено с радиусом начальной окружности, определяемым по выражениям Rн=√ X2+Y2, X=(RK-RBX) SINφ±LSIN2φ
Y=(RK-RBX)COSφ±LCOS2φ, где Rн - радиус начальной окружности некруглого зубчатого колеса
X - абсцисса точек этой окружности данного колеса
Y - ордината точек этой окружности данного колеса
Rк - радиус начальной окружности круглого колеса
RBX - длина водила входного планетарного механизма
L - длина водила сателлита выходного планетарного механизма
φ - угол поворота водила входного планетарного механизма. 2 ил.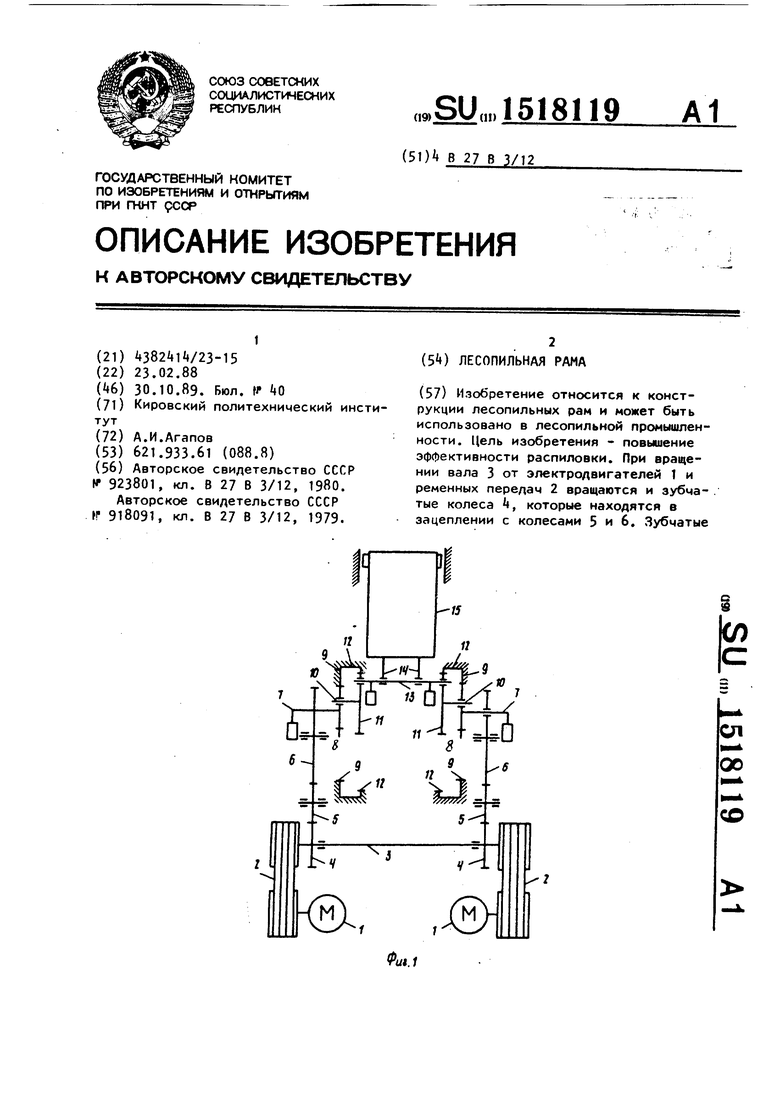
Изобретение относится к конструкции лесопильных рам и может быть использовано в лесопильной промышленности.
Цель изобретения - повышение эф- фективности распиловки.
На фиг.1 изображена кинематическая схема лесопильной рамы; на фиг.2 - схема к расчету параметров лесопильной рамы.
Лесопильная рама состоит из электродвигателей 1, ременной передачи 2, распределительного - синхронизирующего вала 3 и зубчатых колес k - 6, Зубчатое колесо А жестко установлено на валу 3 и находится в зацеплении с паразитным колесом 5, которое в свою очередь находится в зацеплении с колесом 6. На зубчатом колесе 6, являющимся водилом, со смещением установлен вал 7, на котором жестко зак- реплен сателлит В, находящийся в зацеплении с неподвижным зубчатым колесом 9. Сателлит 8 с осью 10 является также водилом, на котором закреплен сателлит (зубчатое колесо) 11. Сателлит 11 находится в зацеплении с неподвижным зубчатым колесом 12, На сателлите 11 расположен кривошип 13, на котором установлен палец, шарнирно соединенный с тягами 1. Тяги I зак- реплены на пильной рамке 15. Одно из зубчатых колес 11 и 12 или оба колеса явлрются некруглыми.
Планетарный механизм состоит из двух ступеней (механизмов). В соответ ствии с направлением потока мощности ведомый планетарный преобразователь включает в себя центральные колеса 12
0
s
5 0 0
5
сателлит 11 и водило, расположенное на сателлите 8, ведущий планетарный преобразователь включает в себя центральное колесо 9, сателлит В и водило г, расположенное на колесе 6.
Для получения траектории движения пильной рамки по замкнутой самопересекающейся кривой необходимо, чтобы передаточное отношение зубчатых колес ведущего (входного) планетарного механизма было бы в 1,5 раза больше передаточного отношения зубчатых колес ведомого (выходного) планетарного механизма. Зная передаточное отношение зубчатых колес выходного планетарного механизма, которое равно двум, передаточное отношение зубчатых колес входного механизма должно быть равно трем.
Лесопильная рама работает следующим образом.
Движение от электродвигателей 1 передается синхронизирующему - распределительному валу 3 с помощью ременных передач 2. Вместе с валом 3 вращаются и зубчатые колеса , которые с помощью паразитных шестерен 5 передают движение зубчатым колесам 6. Зубчатые колеса 6, являясь водилами, вращают валы 7 и вместе с ним сателлиты 8, которые получают дополнительное вращение от зацепления с неподвижными зубчатыми колесами Э. Вместе с сателлитами 8 вращаются и оси 10 с сателлитами 11, которые получают дополнительное вращение от зацепления с неподвижными зубчатыми колесами 12. От сателлитов 11 движение передается
515181
пальцам кривошипа 13, а от них тягам и пильной рамке 15.
Если г., г
с, а водила расположены
в противоположные стороны от осей их вращения, когда пильная рамка находися в в.м.т,, то движение пил будет происходить по самопересекающейся замкнутой кривой с узловой точкой, расположенной в верхней половине хо- да. Причем при вращении водила г по направлению движения распиливаемого материала будет обеспечиваться отвод пил от материала.
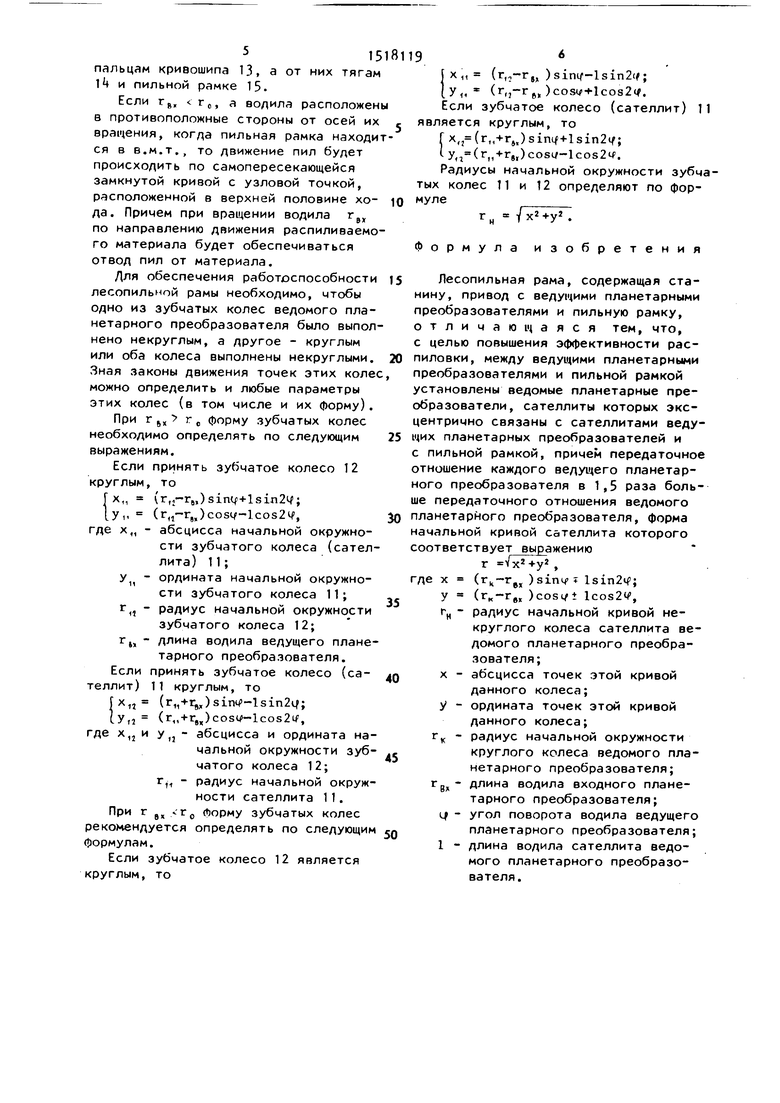
Для обеспечения работоспособности лесопильной рамы необходимо, чтобы одно из зубчатых колес ведомого планетарного преобразователя было выполнено некруглым, а другое - круглым или оба колеса выполнены некруглыми. Зная законы движения точек этих коле можно определить и любые параметры этих колес (в том числе и их форму). При г J, г, форму зубчатых колес необходимо определять по следующим выражениям.
Если принять зубчатое колесо 12 круглым, то
х„ (r,j-r,,)sint +lsin2i ; Уп (r,,-r,,)cost/-lcos24 , где х„ - абсцисса начальной окружности зубчатого колеса (сателлита) 11;
У,, ордината начальной окружности зубчатого колеса 11; г,, - радиус начальной окружности
зубчатого колеса 12; г,, - длина водила ведущего планетарного преобразователя. Если принять зубчатое колесо (са- теллит) 11 круглым, то
fx,j (r,,-t-r,)sin4 -lsin2i ; 1у,2 (r,, + r,,)cosK -lcos24 , где x,j и у,j - абсцисса и ордината начальной окружности зубчатого колеса 12; г,, - радиус начальной окружности сателлита 11. При г g, -:Тд форму зубчатых колес рекомендуется определять по следующим формулам.
Если зубчатое колесо 12 является круглым, то
9
|Xi, (г,,,-г,, )sinir-lsin2(f;
Уц (г„-г л, )cosv -lcos2 f.
Если зубчатое колесо (сателлит) 11 является круглым, то
Г x,j(r,,-fr,,)sinif-Hsin24;
y,(r,,+Tf,)cos(j-lcos2 f.
Радиусы начальной окружности зубчатых колес 11 и 12 определяют по формуле
г„ У .
Формула изобретения
Лесопильная рама, содержащая станину, привод с ведущими планетарными преобразователями и пильную рамку, отличающаяся тем, что, с целью повышения эффективности распиловки, между ведущими планетарными преобразователями и пильной рамкой установлены ведомые планетарные преобразователи, сателлиты которых эксцентрично связаны с сателлитами ведущих планетарных преобразователей и с пильной рамкой, причем передаточное отношение каждого ведущего планетарного преобразователя в 1,5 раза болье передаточного отношения ведомого планетарного преобразователя, форма начальной кривой сателлита которого соответствует выражению
0
д
п
5
где X ( )s Isin2if;
у (, )cosi/t lcos2V,
r - радиус начальной кривой некруглого колеса сателлита ведомого планетарного преобразователя;
абсцисса точек этой кривой данного колеса; ордината точек этой кривой данного колеса; радиус начальной окружности круглого колеса ведомого планетарного преобразователя; длина водила входного планетарного преобразователя;
1| - угол поворота водила ведущего планетарного преобразователя;
1 - длина водила сателлита ведомого планетарного преобразователя.
X У г
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Бюл | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Привод лесопильной рамы | 1979 |
|
SU918091A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
