27
( 2
(Л
СП
оо
О)
о
00
ГЧ)
3151
на 7 и 8, охв.чтывающие соответствующие секторы 5 н 6, имеют зубья для зацепления с последними и друг с другом. Устройство для перемещения секторов 5 и 6 (изменения передаточного отношения) выполнено в виде кинематических пар винт - гайка (винты 9 и 10 и гайки 11 и 12), приводимых в действие кинематически связанными дифференциальными зубчатыми механизмами, каждый из которых состоит из
8608
колес 13, 16, 17, 18, 20, 21, 23, 24 и управляющего вспомогательного вала 19, При работе передачи вращающий , момент от вала 1 к валу 2 передается по кинематической цепи сектор 5 - кольцо 7 - кольцо 8 - сектор 6. Для одновременного перемещения секторов 5 и 6 независимо от вращения валов Q 1 и2 поворачивают вал 19 за маховичок 28, чем приводят в действие кинематические пары винт - гайка. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача | 1990 |
|
SU1776905A1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| Зубчатая передача | 1989 |
|
SU1716225A2 |
| МЕХАНИЗМ ПОДЪЕМА | 2018 |
|
RU2692323C1 |
| Зубчатая безводильная планетарная передача | 2016 |
|
RU2617887C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2116461C1 |
| Автоматический планетарный вариатор | 1977 |
|
SU765570A1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428608C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523506C2 |
| Устройство для радиального перемещения резца | 1975 |
|
SU599930A1 |
Изобретение относится к машиностроению, к передачам с изменяемым передаточным отношением. Цель изобретения - повышение надежности зубчатой передачи - достигается за счет повышения кинематической точности устройства для изменения передаточного отношения. Зубчатые секторы 5, 6 установлены на валах 1, 2 с возможностью одновременного радиального перемещения в пазах дисков 3, 4. Кольца 7, 8, охватывающие соответствующие секторы 5, 6, имеют зубья для зацепления с последними и друг с другом. Устройство для перемещения секторов 5, 6 (изменения передаточного отношения) выполнено в виде кинематических пар винт-гайка (винты 9, 10 и гайки 11, 12), приводимых в действие кинематически связанными дифференциальными зубчатыми механизмами, каждый из которых состоит из колес 13, 16, 17, 18, 20, 21, 23, 24 и управляющего вспомогательного вала 19. При работе передачи вращающий момент от вала 1 к валу 2 передается по кинематической цепи сектор 5 - кольцо 7 - кольцо 8 - сектор 6. Для одновременного перемещения секторов 5, 6 независимо от вращения валов 1, 2 поворачивают вал 19 за маховичок 28, чем приводят в действие кинематические пары винт-гайка. 1 ил.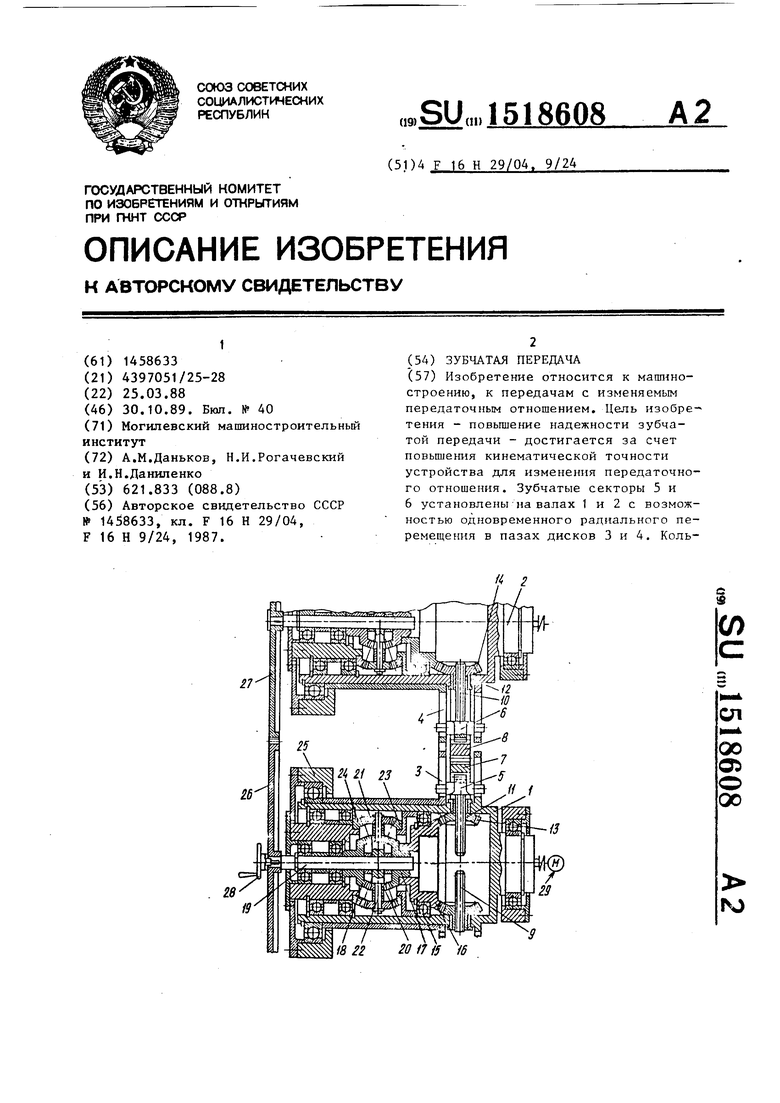
Изобретение относится к машиностроению.
Целью изобретения является повышение надежности зубчатой передачи за счет повышения кинематической точности устройства для изменения передаточного отношения.
На чертеже изображена предлагаема зубчатая передача.
Зубчатая передача содержит параллельные ведущий 1 и ведомый 2 полые валы, на которых закреплены пары дисков 3 и 4 с радиальными пазами. В последних равномерно по окружности валов 1 и 2 с возможностью одновременного радиального перемещения установлены зубчатые секторы 5 и 6. Секторы 5 ведущего вала 1 кинематически связаны с секторами 6 ведомого вала 2 с помощью зубчатых элементов в виде двух охватывающих соответственно секторы 5 вала 1 и секторы 6 вала 2 колец 7 и 8. Кольца 7 и 8 имеют внутренние для взаимодействия с сектора- ми 5 и 6 и наружные для взаимодействия друг с другом зубья. Устройство для одновременного радиального перемещения секторов 5 и 6 выполнено в виде соответствующих числу секторов 5 и 6 кинематических пар винт - гайка, винты 9 и 10 которых жестко скрелены с секторами 5 и 6, а гайки 11 и 12 установлены в радиальных отверстиях в стенках валов 1 и 2 с возмож
ностью вращения, и двух установленных на соответствующих валах 1 и 2 кинематически связанных между собой дифференциальных зубчатых механизмов для независимого от вращения валов 1 и 2 привода гаек 11 и 12. На гайках 11 и 12 выполнены конические зубчатые венцы 13 и 14 для взаимодействия с соответствующими дифференциальными
- д
0
5
зубчатыми механизмами. Каждьй из последних состоит из размещенного в полости соответствующего вала (1,2) на подшипнике 15 конического зубчатого колеса 16, связанного с ним посредством центральных зубчатых колес 17 и 18 вспомогательного вала 19, сателлитов 20 и 21, водила 22 и пары дополнительных центральных зубчатых колес 23 и 24. Колесо 23 жестко связано с соответствующим валом (1,2), а колесо 24 - с корпусом 25 передачи. Кинематическая связь дифференциальных механизмов обеспечивается зацеплением установленных на соответствующих вспомогательных валах 19 зубчатых колес 26 и 27. Вращение вспомогательного вала 19 производится вручную маховичком 28. Ведущий вал 1 приводится во вращение электродвигателем 29.
Зубчатая передача работает следующим образом.
Вращение вала электродвигателя 29 передается ведущему валу 1 и установленным в пазах дисков 3 зубчатым сектором 5, зубья которых, зацепляясь с внутренними зубьями кольца 7, сообщают ему вращение. Зацепление соответствующих наружных зубьев вращение передается от кольца 7 кольцу 8. Зубья кольца 8, зацепляясь с зубьями зубчатых секторов 6, установленных на ведомом валу 2, сообщают последнему вращение. Передаточное отношение передачи определяется отношением радиусов вращения секторов 5 и 6 и изменяется с изменением величины этих радиусов. В работающей передаче это осуществляется следующим образом. Благодаря наличию в каждом дифферен- гщальном механизме управляющего (состоящего из зубчатых колес 17 и 18 и
сателлита 20) и замыкающего (состоящего из сателлита 21 и зубчатых колес 23 и 24 и определяющего закон движения зубчатых колес 17 и 18 и сателлита 20) дифференциалов валы 19 неподвижны. Вращением маховичка 28 одному из валов 19 сообщается вращательное движение, тогда другой вал 19 благодаря наличию передачи из колес 26 и 27 получает вращение в противоположном направлении. Движение валов 19 не зависит от движения валов 1 и 2. Вращение валов 19 в противоположных направлениях передается зубчатым ко- лесам 16, а от них - гайками 11 и 12. Винты 9 и 10 поступательно перемещаются вдоль своих осей в противоположных направлениях. Выпет зубчатых секторов 5 и 6, установленных на ва- лах 1 и 2, изменяется на одну и ту же величину, но в противоположных направлениях, что и обеспечивает изменение передаточного числа передачи в процессе ее работы. Использование
для перемещения секторов 5 и 6 передач зацеплением повышает кинематическую точность этого перемещения, а следовательно, и надежность зубчатой передачи в целом.
Формула изобретения
Зубчатая передача по апт. св. № 1458633, отличающаяся тем, что, с целью повышения надежности, устройство для одновременного радиального перемещения зубчатых секторов вьтолнено в виде соответствующ11Х числу секторов кинематических пар винт - гайка, винты которых жестко скреплены с секторами, а гайки установлены в стенках полых валов с возможностью вращения, и двух установленных на соответствующих валах кинематически связанных между собой дифференциальных зубчатых механизмов для независимого от вращения валов привода соответствующих гаек.
| Авторское свидетельство СССР № 1458633, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
