Изобретение относится к машиностроению, к передачам с изменяемым передаточным отношением.
Цель изобретения -повышение кинематической точности зубчатой передачи за счет увеличения жесткости зацепления.
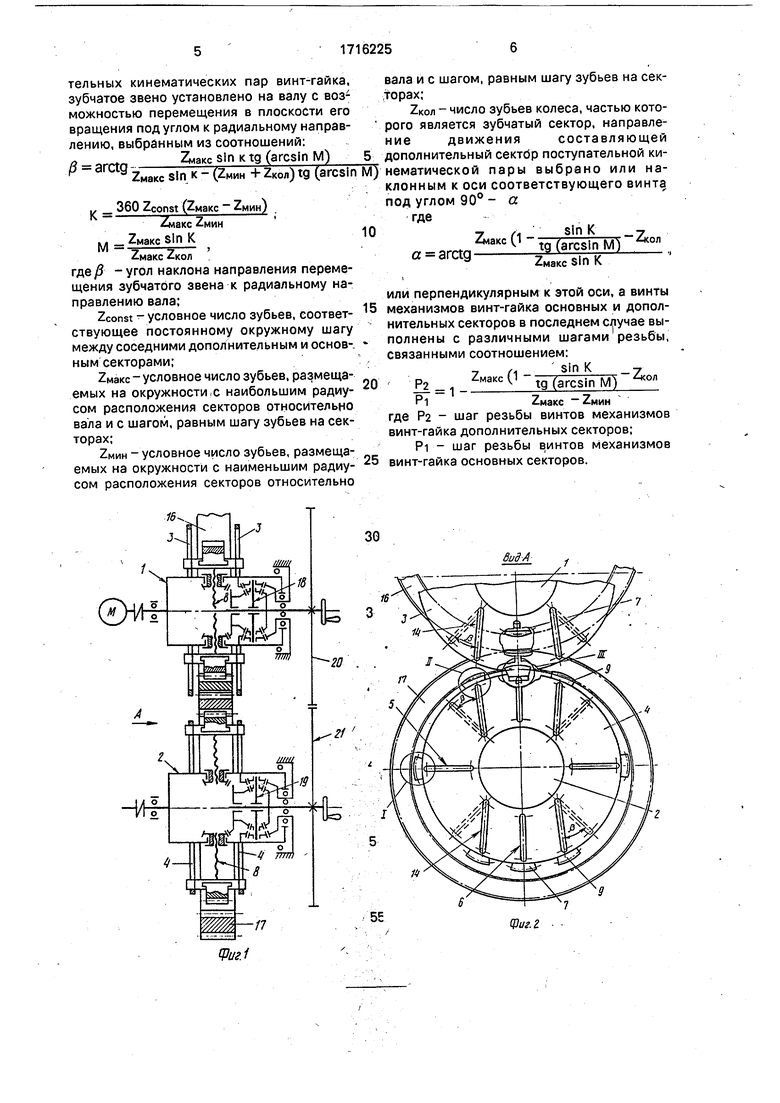
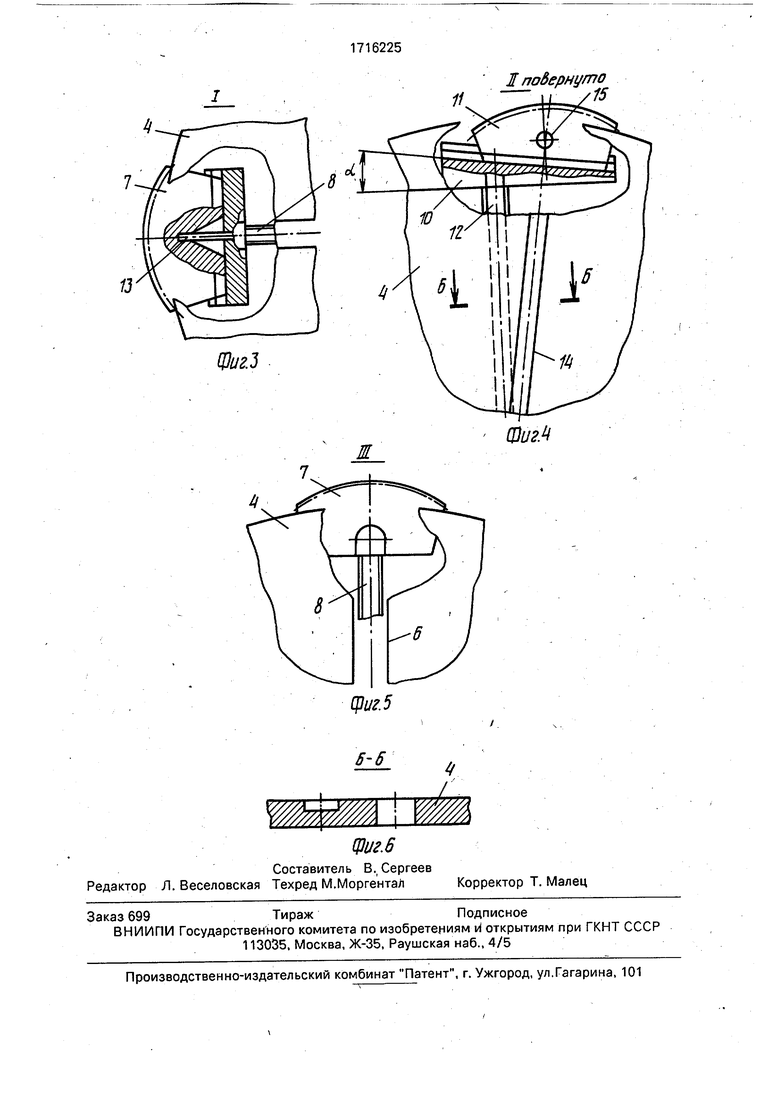
На фиг. 1 изображена зубчатая передача; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фцг. 2; на фиг. 4 - узел II на фип 2; на фиг. 5 - узел III на фиг. 2; на фиг. 6 - разрез Б-Б на фиг. 4.
Зубчатая передача содержит параллельные ведущий 1 и ведомый 2 валы, за- крепленные на них диски 3. и 4 с радиальными направляющими пазами 5 и 6 в плоскости вращения, установленные на валах 1,2с возможностью синхронного перемещения вдоль направляющих пазов 5 и
б дисков 3 и 4 зубчатые сектора 7 и устройство для синхронного перемещения зубчатых секторов 7 в виде связанных с соответствующими секторами 7 механизмов винт-гайка с радиально размещенными по отношению к валам 1 и 2 винтами 8.
Передача снабжена дополнительными .зубчатыми секторами 9, установленными по окружности валов 1 и 2 попарно симметрично в паре каждому из части основных зубча- тых секторов 7, и соответствующими дополнительными кинематическими парами винт-гайка. Дополнительные зубчатые сектора 9 выполнены в виде поступатель- (ных кинематических пар состоящих каждая из опорного звена 10 и зубчатого звена 11 (фиг. 4). Опорное звено 10 каждой поступательной пары жестко соединено с соответО
ьо ю ел
к
ствующим винтом 12 дополнительных кинематических пар винт-гайка. Зубчатое звено 11 установлено на валу с возможностью перемещения в плоскости его вращения под углом к радиальному направлению, выбран- 5 ным из соотношений:
о - яггтп&акс sin к tg (arcsin M)
р drыу 2„акс sin к - (ZMHH + гКОл) tg (arcsin М)
v - 360 Zconst (ZMBKC ZMMH) -макс ZMHH
М
ZMaKc Sin К
2макс
где Р -угол наклона направления перемещения зубчатого звена 11 к радиальному направлению вала;
Zconst -условное число зубьев, соответствующее постоянному окружному шагу между соседними дополнительным и основным секторами 9 и 7;у
ZMBKC - условное число зубьев, размещаемых на окружности с наибольшим радиусом расположения секторов 7 и 9 относительно валов 1 и 2 и с шагом, равным шагу зубьев на секторах 7 и 9;ZMHH - условное число зубьев, размещаемых на окружности с наименьшим радиусом расположения секторов 7 и 9 относительно валов 1 и 2 и с шагом, равным шагу зубьев на секторах 7 и 9;
.коп число зубьев колеса, частью которого является зубчатый сектор 7 (9).
Направление движения составляющей дополнительный сектор 9 поступательной кинематической пары выбрано или наклон- ным к оси соответствующего винта 12 под углом 90° -а где
7 (Sin ,
а - arrtoС (arcsin М)
а arcigгмакс sin К
или перпендикулярным к этой оси. Винты 8 и 12 механизмов винт-гайка основных и дополнительных секторов 7 и 9 в последнем
случае выполнены с различными шагами резьбы, связанными соотношением
sin К
tg (arcsin M)
-I
-макс
-2
мин
где Р2 шаг резьбы винтов 12 механизмов винт-гайка дополнительных секторов 9;
Pi - шаг резьбы винтов 8 механизмов винт-гайка основных секторов 7,р.,.
Часть секторов 7, перемещаемых по радиальным пазам 5, установлена с возможностью ограниченных упругих перемещений в окружном направлении ди5
М)
10
®
оО
лп
40
45
50
р.,.
сков 3 и 4, для чего используются пружины 13, связывающие сектор 7 с соответствующим винтом 8 (фиг. 3). Для перемещения зубчатых звеньев 11 дополнительных секторов 9 в плоскости вращения валов 1 и 2 под углом к радиальному направлению в дисках 3 и 4 предусмотрены наклонные пазы 14, а на звеньях 11 - пальцы 15, размещенные в этих пазах 14. Кинематическая связь между валами 1 и 2 осуществляется через зацепляющиеся между собой зубчатые ободы 16 и 17 с внутренними зубьями, зацепляющимися с секторами 7 и 9 соответствующих валов 1 и 2. Синхронность перемещения секторов 7 и 9 вдоль пазов 5, 6 и 14 дисков 3 и 4 обеспечивается кинематической связью всех механизмов винт-гайка между собой посредством дифференциалов 18 и 19 и колес 20 и 21.
Передача работает следующим образом.
Передача момента с вала 1 на вал 2 осуществляется .зацеплением ободов 16 и 17. Для изменения передаточного отношения приводят в движение механизмы винт- гайка, что обеспечивает синхронное и противоположное по направлению перемещение секторов 7 и 9 на валах 1 и 2 в пазах дисков 3 и 4. Происходит изменение диаметров окружностей, на которых расположены сектора 7 и 9, по отношению к соответствующим валам 1 и 2. Группа секторов 7 и 9, перемещающихся соответственно вдоль радиального 6 и симметричных ему наклонных 14 пазов, обеспечивает жесткую кинематическую связь соответствующего вала и обода независимо от диаметра расположения секторов 7 и 9, так как характер перемещения секторов 7 и 9 обеспечивает постоянство окружного шага между ними. В то же время упругая установка части радиально перемещаемых секторов 7 посредством пружин 13 обеспечивает сглаживание динамических нагрузок в зацеплении,
Формула изо.бретения
Зубчатая передача по авт.. св. № 1518608, о тличающаяся тем, что, с целью повышения кинематической точности, она снабжена дополнительными зубчатыми секторами, установленными по окружности валов попарно симметрично в паре каждому из части основных зубчатых секторов, и соответствующими дополнительными кинематическими парами винт- гайка, дополнительные зубчатые сектора выполнены в виде поступательных кинематических пар, состоящих каждая из опорного, и зубчатого звеньев, опорное звено каждой поступательной пары жестко соединено с соответствующим винтом дополнительных кинематических пар винт-гайка, зубчатое звено установлено на валу с возможностью перемещения в плоскости его вращения под углом к радиальному направлению, выбранным из соотношений: в arctgгмакс sin к tg (arcsin M)
2макс sin к (2мин + 2КОл) tg (arcsin M)
., 360 Zconst (2макс ZMHH)
ZMSKC ZMIIH .. 2макс Sin К
IVI - -7-j)
Ј-макс Јкол
где/3 -угол наклона направления перемещения зубчатого звена к радиальному направлению вала;
Zconst - условное число зубьев, соответствующее постоянному окружному шагу между соседними дополнительным и основным секторами;
ZMaicc - условное число зубьев, размещаемых на окружности,с наибольшим радиусом расположения секторов относительно вала и с шагом, равным шагу зубьев на секторах;
ZMMH - условное число зубьев, размещаемых на окружности с наименьшим радиусом расположения секторов относительно
)
0
5
0
5
вала и с шагом, равным шагу зубьев на секторах;
2кол - число зубьев колеса, частью которого является зубчатый сектор, направление движения составляющей дополнительный сектбр поступательной кинематической пары выбрано или наклонным к оси соответствующего винта под углом 90° - а.
где
2макс (1
а arctg
sin К
tg (arcsin M)
-Zo
,ол
ZMBKC sin К
I
или перпендикулярным к этой оси, а винты механизмов винт-гайка основных и дополнительных секторов в последнем случае выполнены с различными шагами резьбы, связанными соотношением:
v sin К
i-макс
р2 л PI -1
tg (arcsin M)
-ZK,
on
ZMBKC - ZMHH
где Pi - шаг резьбы винтов механизмов винт-гайка дополнительных секторов;
Pi - шаг резьбы винтов механизмов винт-гайка основных секторов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля профилей зубьев зубчатых колес | 1990 |
|
SU1739179A1 |
| Зубчатая передача | 1988 |
|
SU1518608A2 |
| ЭЛЕКТРОПОГРУЗЧИК С БОКОВОЙ ЗАГРУЗКОЙ | 2013 |
|
RU2523355C1 |
| Механизм для преобразования вращательного движения во вращательно-колебательное | 1989 |
|
SU1726876A1 |
| Зубчатая передача | 1990 |
|
SU1776905A1 |
| Зубчатый вариатор | 1989 |
|
SU1716224A1 |
| Способ отделочной обработки зубчатых элементов муфты с пространственно-модифицированными зубьями | 1989 |
|
SU1613257A2 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ КИНЕМАТИЧЕСКОЙ ЦЕПИ ТОКАРНО-ВИНТОРЕЗНОГО СТАНКА | 1994 |
|
RU2069605C1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| Переносной станок для обработки фланцев | 1982 |
|
SU1076196A1 |
Изобретение относится к машиностроению, передачам с изменяемым передаточным отношением. Цель - повышение кинематической точности зубчатой передачи - достигается за счет увеличения жесткости зацепления. Вылет зубчатых секторов 7 9 относительно геометрических осей валов 1,2 изменяется с помощью кинематических пар винт-гайка, приводимых в движение.по- средством управляющего и замыкающего дифференциалов, синхронно, но в противо- фазе. При этом часть зацепляющихся с обо- дами 16, 17 зубчатых секторов 7 перемещается вдоль радиальных пазов 6 дисков 3,4, а другая часть зубчатых секторов 9 перемещается в наклонных пазах 14 дисков 3,4. Конструкция обеспечивает постоянство окружного шага между .частями соседних секторов 7, 9 независимо от радиуса расположения секторов, относительно валов 1,2, что повышает жесткость зацепления при варьировании передаточного отношения. 6 ил. Ё
Фиг. г
ФиаЗ
Ino&epHymo
11/ /15
ШигМ
| Зубчатая передача | 1988 |
|
SU1518608A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
