ел
00 00
:О
гч
ifaf-f
Изобретонис от лтся к электро- син.чи и может Hfiiojii.:--;oBaTbCH как устройство обряботки фазомянипулчрован- И1,1Х (ФМ) ciiriiaiTOB в системах передачи дискретной информации, в совмещсн- tr.itx систрмах связи и в радиолокации, где широко используются псевдослучай- И1,е ФМ сигналы.
Цель изобретения - повьопение дос- топерности измерения.
На фиг, 1 представлена структурная электрическая схема автокорреляционного измерителя параметров псевдослучайного фазоманипулированного сигнала; на фиг, 2 - структурная электри- - ческая схема блока рекуррентио1Ч обработки.
Устройство (фиг, 1) содержит блок 1 умножения, элемент 2 задержки, полосовой фильтр 3, нелинейный элемент 4, первый фильтр 5 нижних частот, генератор 6 скорости перестройки, второй фтьтр 7 нижних частот, измерители 8 и 9 частоты, фазовращатель 10, балансньй манипулятор 11, ключ 12, дополнительный блок 13 умножения, интегратор 14, блок 15 измерения ве личины сдвига фаз, блок 16 рекуррентной обработки, формирователь 17 импульсов, двухпороговьй компаратор 18 и формирователь 19 оценок.
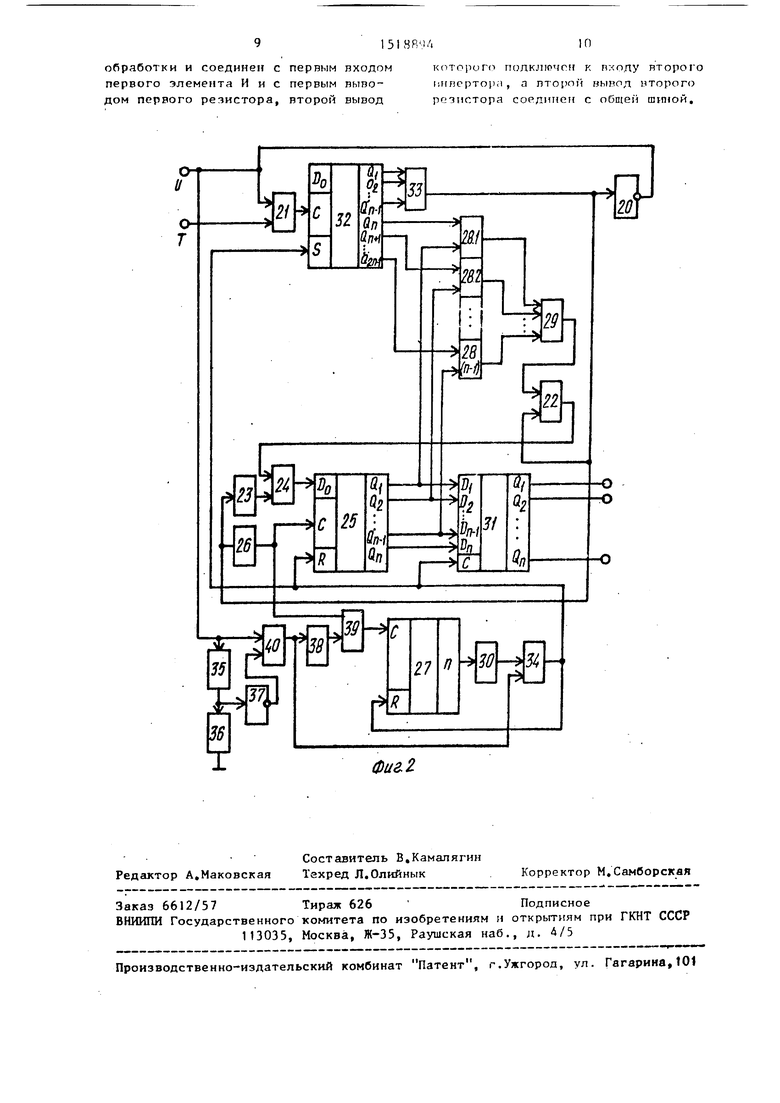
Блок 16 рекуррентной обработки ( фиг, 2) содержит инвертор 20, элементы И 21 И 22, формирователь 23. импульсов, элемент ИЛИ 24, регистр 25 сдвига, генератор 26 тактовых импуль- Сов, счетчик 27, блок 28 умножения,- сумматор 29 по модулю два, элемент 30 задержки, регистры 31 и 32 сдвига, элемент. ИЛИ-НЕ 33, элемент ИЛИ 34,. резисторы 35 и 36, инверторы 37 и Зб и элементы И 39 и 40,
Автокорреляционный измеритель параметров псевдослучайного ФМ сигнала работает следующим образом.
Входное псевдослучайное ФМ колебание (оригинал) поступает на вход блока 1, на второй его вход поступает копия колебания, образованная за счет прохождения оригинала через элемент 2 задержки и задержанная относительно оригинала. Величина задержки изменяется по линейному закону скорости перестройки при помощи генератора 6, выра(5атыпагащего периодическое пилообразное нпгфяХение управления. Результатом перемножения являются биения с высокочастотным заполнением, кото
5
0
5
0
5
0
5
0
5
рые проходят через полсзсогитй фильтр 3 и нелинейный элемент 4, Фильтр(,1 5 и 7 нлстроен, на высокочастотное заполнение, которое является несущей частотой ФМ колебания, и огибающую, являющуюся тактовой частотой псевдослучайной модулирующей последовательности; выход фильтра 5 соединен с измерителем 8, а фильтр 7 - с измерителем 9, на вторые входы которых поступает выходное периодически изменяющееся пилообразное напряжение с генератора 6, в результате с выхода измерителя 8 снимается информация о значении тактовой частоты, а с выхода измерителя 9 - о значении частоты псевдослучайного ФМ колебания.
Синусоидальное колебание с выхода фильтра 7 с частотой, равной несущей частоте сигнала, через фазовращатель 10 поступает на один входбалансного манипулятора 11, Фазовращатель 10 служит для компенсации набега фазы сигнала в элементах измерителя. На другой.вход балансного манипулятора . 1 1 поступает кодовая последовательность видеоимпульсов с выхода фильтра 5 через ключ 12, На выходе балансного манипулятора 11 образуется эталонный сигнал, мaнипyлиpoвaIiный по фазе на 0,Ti в соответствии с псевдослучайной кодовой модулирующей последовательностью видеоимпульсов. Этот сигнал поступает на вход дополнительного блока 13 умножения, на другой вход которого подан входной ФМ сигнал с неизвестным углом сдвига фаз (f , Выходное напряжение дополнительного блока 13 умножения поступает на интегратор 14 пропорциональна отклонению сдвига фаз (f во входном сигнале от Т, В результате с выхода блока 15 снимается информация о значении величины сдвига фаз в 1М сигнале,
Подлежащий обработке сигнал ПСП с выхода фильтра 5 нижних частот через ключ 12 поступает на вход двухпоро- гового компаратора 18, Двухпорогоаый компаратор 18 вырабатывает сигнал , если выходной сигнал фильтра 5 нижних частот больше положительного порога, или сигнал -1, если сигнал на выходе фильтра 5 нижних частот меньше отрицательного порога, или сигнал О, если сигнал на выходе фильтра 5 нижних частот не превышает положительный порог, но больше отри515
дательного порога. Формирователь 19 оценок сигнала формирует логическую единицу и логический нуль в момент поступления тактового импульса от формирователя 17 импульсов. Если в тактовый момент сигнал с выхода фильтра 5 нижних частот не превышает положительный порог, но больше отрицательного порога двухпорогового компаратора J8 т,е, он выработал сигнал О, то в формирователе 19 оценок сигнала оценка не формируется - происходит стирание ненадежного элемен- Taj принимаемого псевдослучайного сигнала (ПСП), Сформированные в формирователе 19 оценок сигнала оценки принимаемого ПСП a( ,2,, ,2) поступают на информационный вход блока 16 рекуррентной обработки, на тактовый вход которого-с выхода формирователя 17 импульсов поступают импульсы тактовой частоты ПСП, сформированные из синусоидальных колебаний тактовой частоты, выделяемых первым фильтром 5 нижних частот.
Блок 16 рекуррентной обработки работает следующим образом,
В. исходном состоянии в блоке 16 рекуррентной обработки все разряды рб- гистра 32 находятся в единичном сое- тоянии, все разряды регистра 25 - в нулевом состоянии, счетчик 27 - в нулевом состоянии, генератор 26 тактовых импульсов выключен. Импульсы тактовой частоты с выхода формирователя 17 импульсов поступают на тактовый вход блока 16 рекуррентной обработки и - через открытый элемент И 1 - на синхровход регистра 32, а принимаемый сегмент ПСП поступает на его информационный вход и последовательно записывается в разряды этого регистра. При записи в первые разряды регистра 32 нулевой серии ПСП (серия из п-1 нулей) элемент ИЛИ-НЁ 33 формирует на инверсном выходе уровень логической единицы, который через инвертор 20 закрывает элемент И 21 и таким образом отключает синхровход регистра 32, Записанный в регистре 32 на этот момент сегмент ПСП замирает, В то же время сигнал логической един41иы с выхода элемента ИЛИ-НЕ 23 открывает элемент И 22, включает генератор 26 тактовых импульсов и Поступает на вход формирователя 23 импульсов, на выходе которого появляется импульс с уровнем логической
889А6
единицы и дпитечьиостыо, большей длительности тактовьгх импульсов генератора 26, но меньшей периода следования тактовых импульсов генератора 26,
Этот импульс совместно с первым тактом генератора 26 через элемент ИЛИ 24 устанавливает первый разряд регистра 25 в единичное состояние
Q (это соответствует значению коэффициента h). Во втором блоке 28 умножения производится умножение значения Ь„ 1 на соответствующий символ ПСП ЗЦ(. , записанный в (п+1)-м разJ5 ряда регистра 32, и .полученньп1 результат (соответствующий h , , ) вторым тактом генератора 26 записывается в первый разряд регистра 25, а значение h „., при этом сдвигается во
20 второй разряд. Значение Ь„,, умножается на символ ПСП втором блоке 28 умножения, а значение Ь„ умно- жается в нем же на символ ПСП , записанный в (п+2)-м элементе регист5 ра 32, Результаты умножения складываются по модулю два в сумматоре 29 и результат (соответствующий значению h п ) третьим тактом генерат о- ра 26 записывается Б первый разряд
Q регистра 25, Значения h и h , этим же тактом сдвигаются в сле дугадие разряды.
После п тактов в регистре 25 будут записаны все коэффициенты полинома обратной связи генератора ПСП;
5
п hn.,,,..hj, h, , В то же время с
0
5
п-м тактом на выходе счетчика 27 (по модулю п) формируется импульс переполнения, который спустя время задержки, определяемое элементом 30 задержки и необходимое для установления регистра 25 в устойчивое состояние, поступает через элемент ИЛИ 34 на синхровход регистра 31, в разряда которого параллельным кодом переписываются значения коэффициентов по- линома из разрядов регистра 25, Зна- чения коэффициентов будут храниться в разрядах регистра 31 до следующего д срабатывания всего блока,
В то же время импульс перемножения счетчика 27 устанавливает разряды регистров 32 и 25 и счетчика 27 в ис- ходаое сйстояние. На выходе элемента ИЛИ-НЕ 33 появляется сигнал логичес- кого нуля, который мере ч инвертор 20 открывает элемент И 21, и на счетный вход регистра 32 поступают импульсы тактовой частоты.
5
Сформированные оценки а; поступа- nt на первый вход элемента И 40 и - через резистор 35 н инвертор 37 - на второй вход элемента И 40, На первом и втором входах элемента И 40 будут противоположные сигналу, следовательно, на выходе элемента И АО - низкий потенциал, который инвертируется инвертором 38, с выхода которого высо- кий потенциал поступает на второй вход элемента И 39, на первый вход которого поступают тактовые импульсы от генератора 26 тактовых импульсов. С выхода элемента И-39 тактовые им- пульсы поступают на счетный вход счетчика 27,
Если в какой-либо тактовый момент на информационный вход блока 16 оценка не поступит, что будет соответст- вовать состоянию высокого входйого сопротивления, то на первом входе элемента И 40 будет сигнал, равный сумме падений напряжений на резисторах 35 и 36, который соответствует логической единице, а на.выходе инвертора 37 - сигнал, равный падению напряжения на резисторе 35, который соотйетствует логическому нулю. Следовательно, на обоих входах элемента И 40 будут логические единицы, на вых9де элемента И 40 будет, сформирован положительный импульс, который через элемент ИЛИ 34 поступит в цепь установки блока 16 рекуррентной обра ботки в исходное состояние, то есть установит все разряды регистра 32 в единичное, все разряды регистра 25 в нулевое, счетчик 27 - в нулевое состояния. Кроме того, на время дей ствия импульса элемент И 39 по второму входу будет закрыт низким потенциалом с выхода инвертора 38, и-тактовый импульс, соответствующий стертому элементу, принимаемой ПСП, не пройдет на его выход. Стирание ненадежного элемента пр инимаемого фазо- манипулированного (ФМ) сигнала приводит к уничто жению всех ранее принятых элементов, и блок 16 рекуррентно обработки начинает новый подсчет количества поступающих оценок принимаемого сигнала.
Форм-у л а изобретения
1. Автокорреляционный измеритель, параметров псевдослучайного фазома- иипулированного сигнала по авт.ев.
5 О Q
5
№ 1197102, отличающийся тем, , с целью повьпиения достоверности измерения, выход ключа подключен к информационному входу блока рекуррентной обработки через введенные последовательно соединенные двух- пороговыЛ компаратор и формирователь оценок, другой вход,которого соединен с выходом формирователя импульсов.
2, Измеритель по п. 1, отличающийся тем, что блок рекур- рентной обработки содержит формирователь импульсов, последовательно соединенные первый регистр сдвига, элемент ИЛИ - НЕ, первый инвертор и первый элемент И-, второй вход которого является тактовым входом блока рекуррентной обработки, последовательно соединенные блок умножения, сумматор по модулю два, второй элемент И, первый элемент ИЛИ, второй регистр сдвига и третий регистр сдвига, выходы разрядов которого являются выходами блока рекуррентной обработки, и последовательно соединенные генератор тактовых импульсов, третий элемент И, счетчик, элемент задержки и второй элемент ИЛИ , последовательно соединенные первый и второй резисторы, последовательно соединенные вто- рой инвертор, четвертый элемент И и третий инвертор, выход первого, элемента И подключен к синхровходу первого регистра сдвига, соответствующие выходы которого подключены к со- ответствующим входам блока умножения, выход элемента ИЛИ - НЕ подключен к второму входу второго элемента .И, к входу генератора тактовых иМпульсов и к входу формирователя импульсов, выход которого подключен- к второму входу первого элемента ИЛИ, выход второго элемента И подключен к синх- ровходу третьего регистра сдвига и к входам установки счетчика первого и второго регистров сдвига, а выход генератора тактовых импульсов подключен к синхровходу второго регистра, сдвига, соотяетствукщие выходы которого подключены к соответствующим входам блока умножения, другой вход третьего элемента И соединен с выходом третьего инвертора, другой вход второго элемента ИЛИ соединен с йыходом четвертого элемента И, другой вход которого является инфор мационным входом блока рекуррентной
обработки и соединен с первым входом первого элемента И и с первым выводом первого резистора, второй вывод
ом 1518Р,...in
котороГ(-) псздключсн к входу второго иипертора, а второй вывод второго резистора СОРДИПСИ с общей штюй.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1984 |
|
SU1197102A2 |
| Дискретный согласованный фильтр | 1978 |
|
SU771891A2 |
| Система для передачи и приема дискретной информации | 1980 |
|
SU886296A1 |
| ЛИНИЯ РАДИОСВЯЗИ С ПОВЫШЕННОЙ СКРЫТНОСТЬЮ ПЕРЕДАВАЕМОЙ ИНФОРМАЦИИ | 2002 |
|
RU2227370C2 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2009 |
|
RU2396722C1 |
| Дискретный согласованный фильтр | 1975 |
|
SU522547A1 |
| Способ формирования шумоподобных фазоманипулированных сигналов | 2020 |
|
RU2731681C1 |
| Устройство для передачи информации псевдослучайными сигналами | 1986 |
|
SU1392625A1 |
| Способ цикловой синхронизации с динамической адресацией получателя | 2016 |
|
RU2621181C1 |
| Приемное устройство псевдослучайных сигналов | 1982 |
|
SU1075430A1 |
Изобретение относится к электросвязи и может использоваться как устройство обработки фазоманипулированных (ФМ) сигналов в системах передачи дискретной информации, в совмещенных системах связи и в радиолокации, где широко используются псевдослучайные ФМ сигналы. Цель изобретения - повышение достоверности измерения. Устройство содержит блок 1 умножения, элемент 2 задержки, полосовой фильтр 3, нелинейный элемент 4, фильтры 5, 7 нижних частот, измерители 8 и 9 частоты, фазовращатель 10, балансный манипулятор 11, ключ 12, дополнительный блок 13 умножения, интегратор 14, блок 15 для измерения величины сдвига фаз, блок 16 рекуррентной обработки, формирователь 17 импульсов. В устройство введены двухпороговый компаратор 18 и формирователь 19 оценок. Компаратор 18 разделяет элементы принимаемого сигнала на надежные (сигналы "+1" и "-1") и ненадежные (сигнал "0"). В формирователе 19 оценка не формируется, а происходит стирание ненадежного элемента, принимаемого псевдослучайного сигнала. 1 з.п. ф-лы, 2 ил.
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1984 |
|
SU1197102A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
