/// ///V// /// //.
|сл
ел 1C
СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Глубиномер для определения глубины хода рабочих органов посевных машин | 1981 |
|
SU1031018A1 |
| СОШНИКОВАЯ СЕКЦИЯ ДЛЯ ТОЧНОГЛУБИННОГО ПОСЕВА | 2015 |
|
RU2606918C1 |
| Устройство для дообрезки ботвы высоко выступающих над почвой кормовых корнеплодов | 1985 |
|
SU1358815A1 |
| Культиватор для обработки склонов,имеющих площадки | 1981 |
|
SU1037854A1 |
| Культиватор для одновременной обработки почвы в междурядьях и междугнездьях | 1957 |
|
SU116673A1 |
| Посадочный аппарат | 1981 |
|
SU938797A1 |
| КОМБИНИРОВАННОЕ ОРУДИЕ ОБРАБОТКИ ПОЧВЫ И СПОСОБ ОБРАБОТКИ ПОЧВЫ | 2007 |
|
RU2340137C1 |
| Устройство для посадки саженцев | 1990 |
|
SU1748701A1 |
| Универсальная роторная пропашная широкозахватная сеялка | 1987 |
|
SU1563612A1 |
| Механизм подвески секций рабочихОРгАНОВ СЕльСКОХОзяйСТВЕННыХ ОРудий | 1979 |
|
SU818513A1 |
Изобретение относится к контрольно-измерительным приборам, применяемым в сельском хозяйстве. Цель изобретения - повышение эффективности работы за счет улучшения точности регулирования глубины хода рабочих органов. Устройство для контроля глубины хода рабочих органов содержит копирующее колесо 15 с демпфирующим устройством 11, блок неподвижных контактов 8 и подвижный контакт 9, взаимодействующий с рабочими органами 4. Неподвижные контакты 8 снабжены счетчиками импульсов 18 задающего генератора 17. Устройство содержит также усреднитель глубины гибкого поводка 1, проходящего через ролики 2, установленные на рабочих органах 4 и раме 16. Один конец поводка закреплен на раме, а другой конец связан с подвижным контактом 9. Блок неподвижных контактов 8 через демпфирующее устройство 11 связан с копирующим колесом 15. В процессе работы каждый рабочий орган 4 при изменении глубины хода воздействует на гибкий поводок 1, изменяя его натяжение. Воздействие всех рабочих органов 4 суммируется, и конец гибкого поводка с подвижным контактом под воздействием (или преодолевая воздействие) натяжного устройства перемещается по блоку неподвижных контактов. Контакт замыкается, и импульсы от генератора поступают в счетчик импульсов. При изменении положения рамы машины относительно поверхности почвы копирующее колесо перемещает блок контактов, чем обеспечивается коррекция значения глубины хода рабочих органов. 2 ил.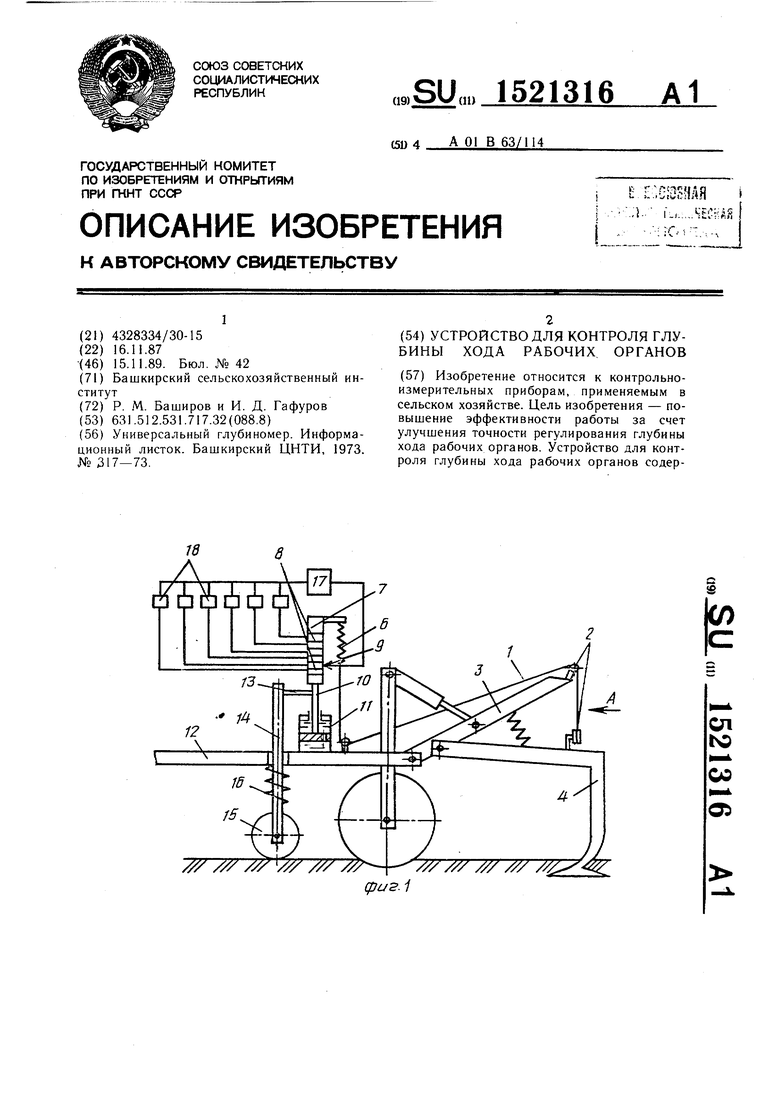
gjus.-
жит копирующее колесо 15 с-демпфирующим устройством 11, блок пе11олвнж(1ы,х контактов 8 и подвижный контакт 9, взаимодействующий с рабочими органами 4. Неподвижные контакты 8 снабжены счетчиками импульсов 18 задаюп1,его генератора 17. Устройство содержит также усреднитель глубины гибкого поводка I, проходян1его чере: ролики 2. установленные на рабочих органах 4 и раме 16. Один конеп иоводка закреплен на раме, а другой конец связан с подвижным контактом 9. Блок неподвижных контактов 8 через демпфирующее устройство И связан с копирующим колесом 15. В процессе работы каждый рабоИзобретение относится к контрольно- измерительных приборам, применяемым в сельском хозяйстве, и может быть использовано при почвообработке и посеве, при исследованиях и испытаниях иочворбрабаты- вающих и посевных агрегатов, в системах, автоматически поддерживающих постоянство глубины хода рабочих органов, а также в устройствах слежения за отклонением контролируемой величины от ее заданного значения.
Цель изобретения - повышение эффективности работь за счёт улучшения точности регулирования глубины хода рабочих органов.
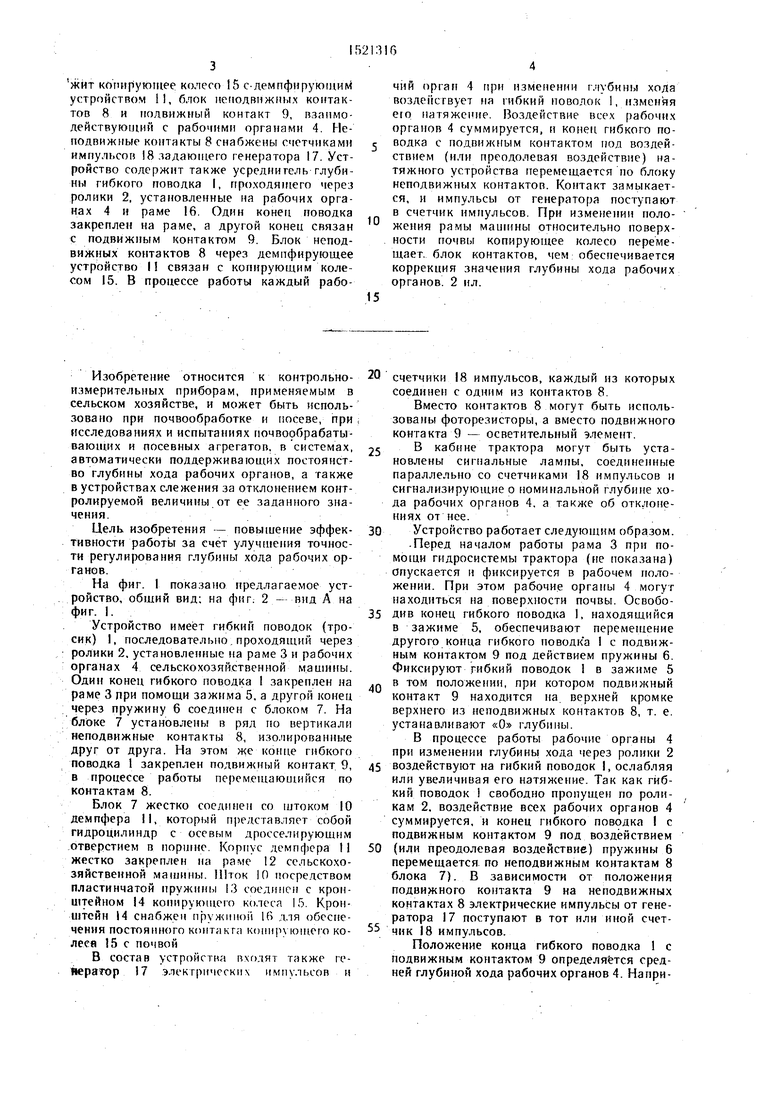
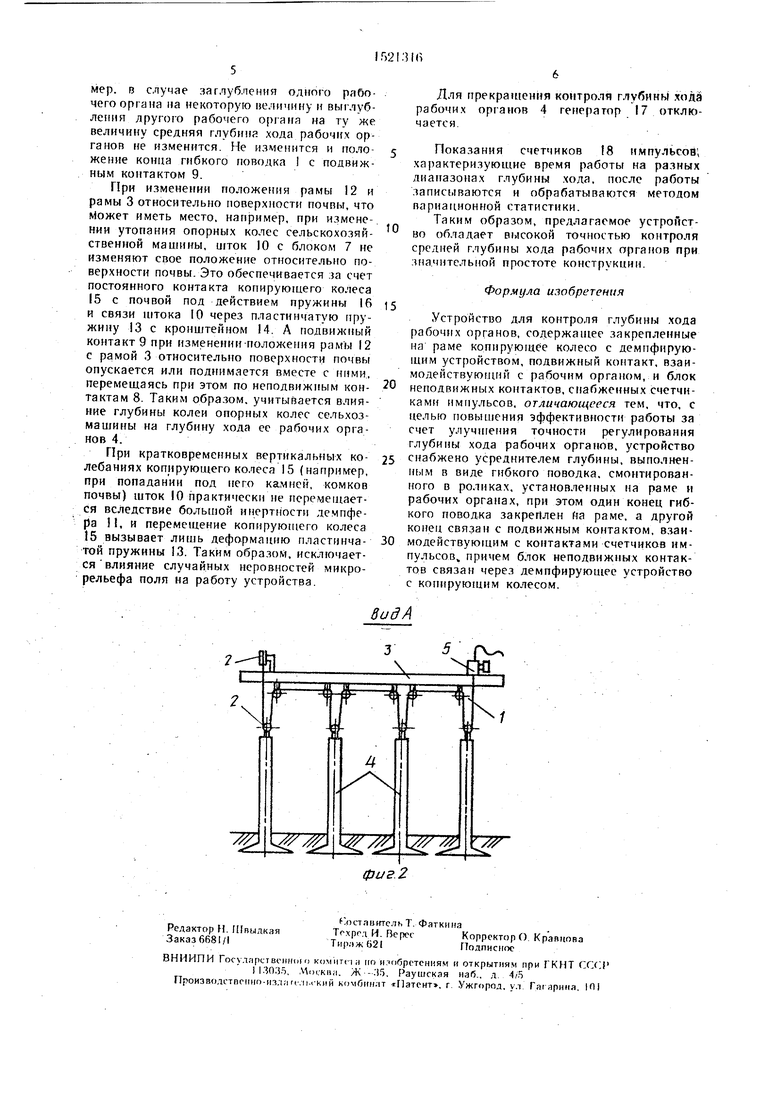
На фиг. 1 показано предлагаемое устройство, общий вид: на фиг; 2 - вид А на фиг. 1.
Устройство имеет гибкий поводок (тросик) I, последовательно, проходящий через ролики 2, установленные на раме 3 и рабочих органах 4 сельскохозяйственной машины. Один конец гибкого поводка 1 закреплен на раме 3 при помощи зажима 5, а другой конец через пружину 6 соединен с блоком 7. На блоке 7 установлены в ряд но вертикали неподвижные контакты 8, изо.чированные друг от друга. На этом же конце гибкого поводка 1 закреплен подвижный контакт 9, в процессе работы перемещающийся по контактам 8.
Блок 7 жестко соединен со щтоком 10 демпфера II, который представляет собой гидроцилиндр с oceBFiiM дросселирующим отверстием в поригие. Корпус демпфера 11 жестко закреплен на раме 12 сельскохозяйственной машины. IlhoK 10 посредством пластинчатой пружины 13 соединен с кронштейном 14 копирующего колеса 15. Кронштейн 14 снабжен пружиной 16 лля обеспечения постоянного коитакга копирующего колеся 15 с почвой
В состав устройства также ге- liepaTOp 17 электрических импульсов и
чий орган 4 при изменении глубины хода воздействует на гибкий поводок 1, изменяя его натяжение. Воздействие всех рабочих органов 4 суммируется, и конец гибкого поводка с подвижным контактом под воздействием (или преодолевая воздействие) ма- тяжного устройства перемещается по блоку неподвижных контактов. Контакт замыкается, и импульсы от генератора поступают в счетчик импульсов. При изменении положения рамы машины oтF ocитeльнo поверхности почвы копирующее колесо перемещает, блок контактов, чем обеспечивается коррекция значения глубины хода рабочих органов. 2 ил.
счетчики 18 импульсов, каждый из которых соединен с одним из контактов 8.
Вместо контактов 8 могут быть использованы фоторезисторы, а вместо подвижного контакта 9 - осветительный элемент.
В кабине трактора могут быть установлены сигнальные лампы, соединенные параллельно со счетчиками 18 импульсов и сигнализирующие о номинальной глубине хода рабочих органов 4. а также об отклонениях от нее.
Устройство работает следующим образом. -Перед началом работы рама 3 при помощи гидросистемы трактора (не показана) опускается и фиксируется в рабочем положении. При этом рабочие органы 4 могут находиться на поверхности почвы. Освободив конец гибкого поводка 1, находящийся в зажиме 5, обеспечивают перемещение другого конца гибкого поводк а 1 с подвижным контактом 9 под действием пружины 6. Фиксируют гибкий поводок 1 в зажиме 5 в том положении, при котором подвижный контакт 9 находится на. верхней кромке верхнего из неподвижных контактов 8, т. е. устанавливают «О глубины.
В процессе работы рабочие органы 4 при изменении глубины хода через ролики 2
воздействуют на гибкий поводок I, ослабляя или увеличивая его натяжение. Так как гибкий поводок 1 свободно пропущен по роликам 2, воздействие всех рабочих органов 4 суммируется, и конец гибкого поводка I с подвижным контактом 9 под воздействием
(или преодолевая воздействие) пружины 6 перемещается по неподвижным контактам 8 блока 7). В зависимости от положения подвижного контакта 9 на неподвижных контактах 8 электрические импульсы от генератора 17 поступают в тот или иной счетчик 18 имнульсов.
Положение конца гибкого поводка 1 с подвижным контактом 9 определяется средней глубиной хода рабочих органов 4. Например. в случае заглубления одного рабочего органа на HOKOTOpyfo величину н выглуб- леиия другого рабочего органа на ту же величину средняя глубниа хода рабочих органов Ffe изменится. Не изменится и положение конца гибкого новодка 1 с подвижным контактом 9.
При изменении rIoлoжet ия рамы 12 и рамы 3 относительно поверхности почвы, что Может иметь место, например, при измене-. НИИ утопания опорных колес сельскохозяйственной машины, UITOK 10 с блоком 7 не изменяют свое положение относительно поверхности почвы. Это обеспечивается :за счет постоянного контакта копирующего колеса 15 с почвой под действием пружины 16 и связи штока 10 через пластинчатую пружину 13 с кронштейном 14. А подвижный контакт 9 при измененииполох ення рамы 12 с рамой 3 относительно поверхности почвы опускается или поднимается вместе с ними, перемещаясь при этом по неподвижным контактам 8. Таким образом, учитывается влияние глубины колеи опорных колес сельхозмашины на глубину хода ее рабочих органов 4.
При кратковременных вертикальных колебаниях копирующего колеса 15 (например, при попадании под него камней, комков почвы) шток 10 практически не перемещается вс,;1едствие большой инертности демпфера , и перемещение копирующего колеса 15 вызывает лишь деформацию пластинчатой пружины 13. Таким образом, исключается влияние случайных неровностей микрорельефа поля на работу устройства.
Для прекращения контроля глубинь) .хода рабочих органов 4 генератор 17 отключается.
Показания счетчиков 18 импульсов;
.характеризующие время работы на разных диапазонах глубины хода, после работы записываются и обрабатываются методом вариационной статистики.
Таким образом, предлагаемое устроиство обладает В1)1сокой точностью контроля средней глубины хода рабочих органов при зна.читсльной простоте конструкции.
Формула изобретения
15
Устройство для контроля глубины .хода рабочих органов, содержан1ее закрепленные на раме копирующее колесо с демпфирующим устройством, подвижный контакт, взаимодействующий с рабочим органом, и блок
20 р еподвижных контактов, снабженных счетчиками импульсов, отличающееся тем, что, с целью повышения эффективности работы за счет улучшения точности регулирования глубины хода рабочих органов, устройство
25 снабжено усреднителем глубины, выполненным в виде гибкого поводка, смонтированного в роликах, устаHOBvieиных на раме и рабочих органах, при этом один конец гибкого поводка закреплен На раме, а другой конец связан с подвижным контактом, взаи30 модействующим с контактами счетчиков импульсов, причем блок неподвижных контактов связан через демпфирующее устройство с ко1щрую1цим колесом.
ad А
| Универсальный глубиномер | |||
| Информационный листок | |||
| Башкирский ЦНТИ, 1973 | |||
| Приспособление для обрезывания караваев теста | 1921 |
|
SU317A1 |
