Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для дообрезки ботвы кормовых корнеплодов (например, кормовой свеклы, TypTienca) до их извлечения из почвы.
Цель изобретения - повышение производительности и качества удаления остатков ботвы высоко выступающих над почвой кормовых корнеплодов.
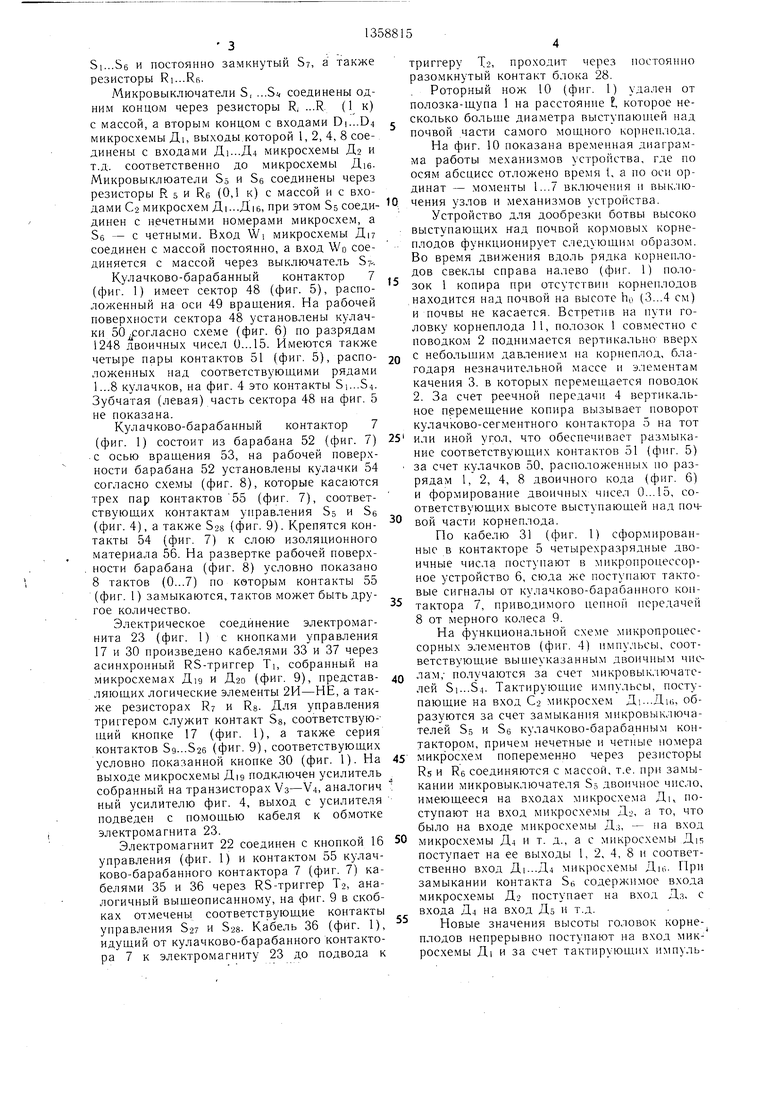
На фиг. 1 изображена общая схема устройства для дообрезки ботвы высоко выступающих над почвой кормовых корнеплодов (ось ножа условно изображена перпендикулярно направлению движения машины); на фиг. 2 - схема электромагнита управления высотой ножа; на фиг. 3 - схема переключателя положений RS-триггеров; на фиг. 4 - функциональная схема микропроцессорных элементов устройства; на фиг. 5 - схема кулачково-сегментного контактора; на фиг. 6 - развертка рабочей поверхности кулачково-сегментного контактора; на фиг. 7 - схема кулачково-бара- банного контактора; на фиг. 8 - развертка рабочей поверхности кулачково-барабанного контактора; на фиг. 9 - функциональная схема RS-триггера; на фиг. 10 - временная диаграмма работы устройства.
Устройство для дообрезки ботвы высоко выступающих над почвой кормовых корнеплодов содержит копир с укороченным и поставленным под большим углом к поверхности поля полозком-щупом 1, поводок-2 которого оцирается на вертикальные направляющие 3, имеющие в своем составеГ эле- .менты качения и через реечную передачу 4 кинематически соединяется с кулачково- сегментным контакторо.м 5, микропроцессорное устройство 6, кулачково-барабанный контактор 7, соединенный цепной, передачей 8 с мерным колесом 9, роторный нож ГО, ось вращения которого расположена горизонтально и совпадает с направлением рядка корнеплодов 11 свеклы, т.е. направлением движения машины {фиг. 1 ось ножа 10 условно изображена перпендикулярно направлению движения). Нож 10 установлен на стойке 12, которая имеет вертикальные направляющие с элементами 13 качения, поводок 14 ограничения высоты обрезки свеклы, поводок 15 для привода в действие микровыключателей 16 и 17, которые соединены электрически с RS-триггерами, а также пластину 18 из мягкого железа, соединенную с верхним концом стойки через промежуточную прокладку из немагнитного материала (не показана), фрикционный ролик 19, коромысло 20 с пластиной 21 из мягкого железа и электромагнит 22 для поворота коромысла 20. Устройство также содержит электромагнит 23 для удержания ножа 10 в верхнем положении, электромагнит 24 управления высотой среза, количество которых соответствует числу ступеней регулирования высоты (фиг. 1 условно показан один элек
0
5
0
5
0
5
0
5
тромагнит). станину 25, состоящую из двух одинаковых соединенных по концам распорками пластин с серией отверстий по числу электромагнитов 24, причем отверстия располагаются в два-три ряда для лучшего размещения относительно отверстий электромагнитов 24. Между пластинами станины 25 находится поводок 14, станина 25 имеет направляющие 26, упирается снизу в упругий элемент 27 (например, из резины), рядом с которым расположен блок 28 контактов, имеющий в составе постоянно замкнутый и постоянно разомкнутый контакты, при этом каждый из электромагнитов 24 имеет подвижный упор 29 для воздействия на соответствующий контакт 30, а число контактов 30 равно числу электромагнитов 24. Электрические элементы устройства соединены между собой кабелями 31-38.
Электромагнит 24 изготовлен по типу втяжного (броневого) электромагнита и имеет намагничивающую обмотку 39 (фиг. 2), а также якорь 40, в торце которого прикреплен штифт 41 из немагнитного материала, проходящий сквозь небольшое отверстие, сделанное в неподвижном сердечнике 42, изготовленном совместно с торцовым фланцем, на конце штифта 41 находится прочный палец 43, который соответствует отверстиям регулирования высоты станины 25, к якорю 40 жестко прикренлен упор 29, а также установлена пружина 44. Электромагнит 24 крепится к станине 25 с помощью распорной втулки 45, которая центрирует палец 43 относительно ( -.срстий станины.
Для срабатывания микровыключателей 16 и 17 между их кнопками и поводком 15 помещен двуплечий рычаг 46 (фиг. 3), правый конец которого имеет острую кромку и небольшое перекрытие б относительно острой кромки поводка 15, а левый конец с помощью пружины 47 прикреплен к раме .машины. Поворот рычага 46 относительно оси вращения показан стрелками.
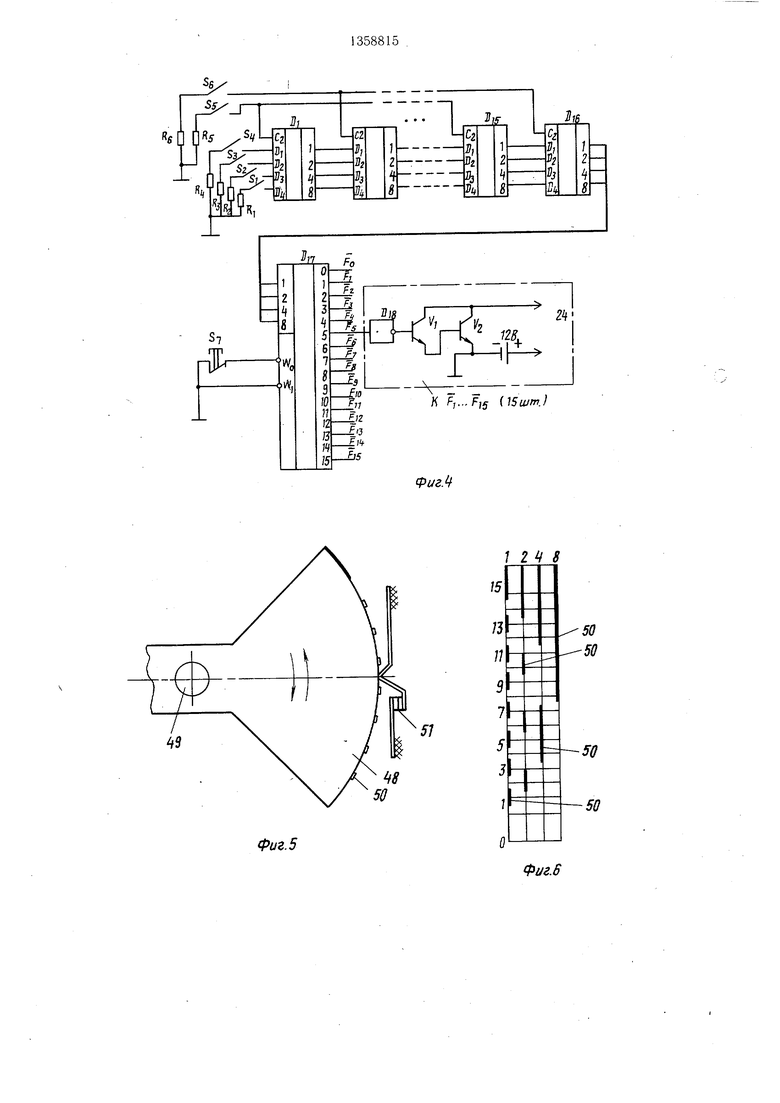
Микропроцессорное устройство 6 (фиг. 1) состоит из серии микросхем Д|...Д16 (может быть другое количество), представляющих регистры сдвига четырехразрядных двоичных чисел, соответствующих высоте, выступающей над почвой части корнеплода, и составляющих линию задержки сигналов (фиг. 4), микросхемы Д17, представляющей собою дешифратор, к инверсным выводам Fi...Fi5 которого подклю чены через логические элементы НЕ (микросхема Д18) усилители Vi-V2, составленные из транзисторов КТ315 4 и КТ817 и источника постоянного тока на- I пряжением до 12 В. К выводам усилителей, а всего их 15 шт., соответственно подключены электромагниты 24 управления (фиг. 1) Вывод FO микросхемы Д17 (фиг. 4) оставлен незадействованным. Кроме того, к микропроцессорному устройству относятся микровыключатели - постоянно разомкнутые
15
20
Si...S6 и постоянно замкнутый S, а также резисторы Ri.-.Rs.
Микровыключатели S, ...S соединены одним концом через резисторы R, ...R (1 к) с массой, а вторым концом с входами D|...D4 5 микросхемы Ди выходы.которой 1, 2, 4, 8 соединены с входами Д1...Д4 микросхемы Да и т.д. соответственно до микросхемы Дш- Микровыклюатели So и Se соединены через резисторы R 5 и Re (0,1 к) с массой и с входами С2 микросхем Д|...Д|6, нри этом Ss соеди- Q динен с нечетными номерами микросхем, а 5б - с четными. Вход Wi микросхемы Д: соединен с массой постоянно, а вход Wo соединяется с массой через выключатель S-..
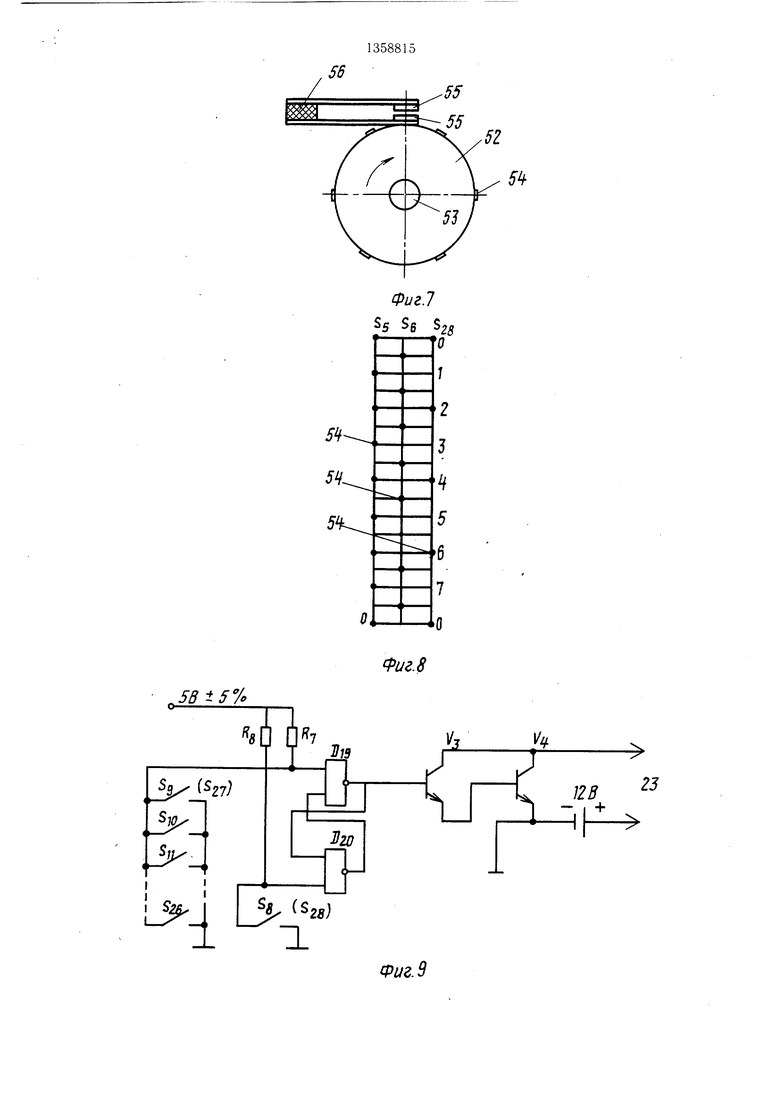
Кулачково-барабанный контактор 7 (фиг. 1) имеет сектор 48 (фиг. 5), расположенный на оси 49 вращения. На рабочей поверхности сектора 48 установлены кулачки 50 рогласно схеме (фиг. 6) цо разрядам 1248 двоичных чисел 0...15. Имеются также четыре нары контактов 51 (фиг. 5), расположенных над соответствующими рядами 1...8 кулачков, на фиг. 4 это контакты Si...84. Зубчатая (левая) часть сектора 48 на фиг. 5 не показана.
Кулачково-барабанный контактор 7
(фиг. 1) состоит из барабана 52 (фиг. 7) с осью вращения 53, на рабочей поверхности барабана 52 установлены кулачки 54 согласно схемы (фиг. 8), которые касаются трех пар контактов 55 (фиг. 7), соответствующих контактам управления Ss и Se (фиг. 4), а также S98 (фиг. 9). Крепятся контакты 54 (фиг. 7) к слою изоляционного материала 56. На развертке рабочей поверх- , ности барабана (фиг. 8) условно показано 8 тактов (0...7) по которым контакты 55 (фиг. 1) замыкаются, тактов может быть другое количество.
Электрическое соединение электромагнита 23 (фиг. 1) с кнопками управления 17 и 30 произведено кабелями 33 и 37 через асинхронный RS-триггер Т, собранный на микросхемах Д19 и Д2о (фиг. 9), представляющих логические элементы 2И-НЕ, а также резисторах R и Rg. Для управления триггером служит контакт Ss, соответствую- щий кнопке 17 (фиг. 1), а также серия контактов S9...S26 (фиг. 9), соответствующих
7) 25
30
35
40
триггеру Та, проходит через постоянно разомкнутый контакт блока 28.
Роторный нож 10 (фиг. 1) удален от полозка-щупа 1 па расстояние Е, которое несколько больще диаметра выступающей над почвой .части самого мощного корнеплода.
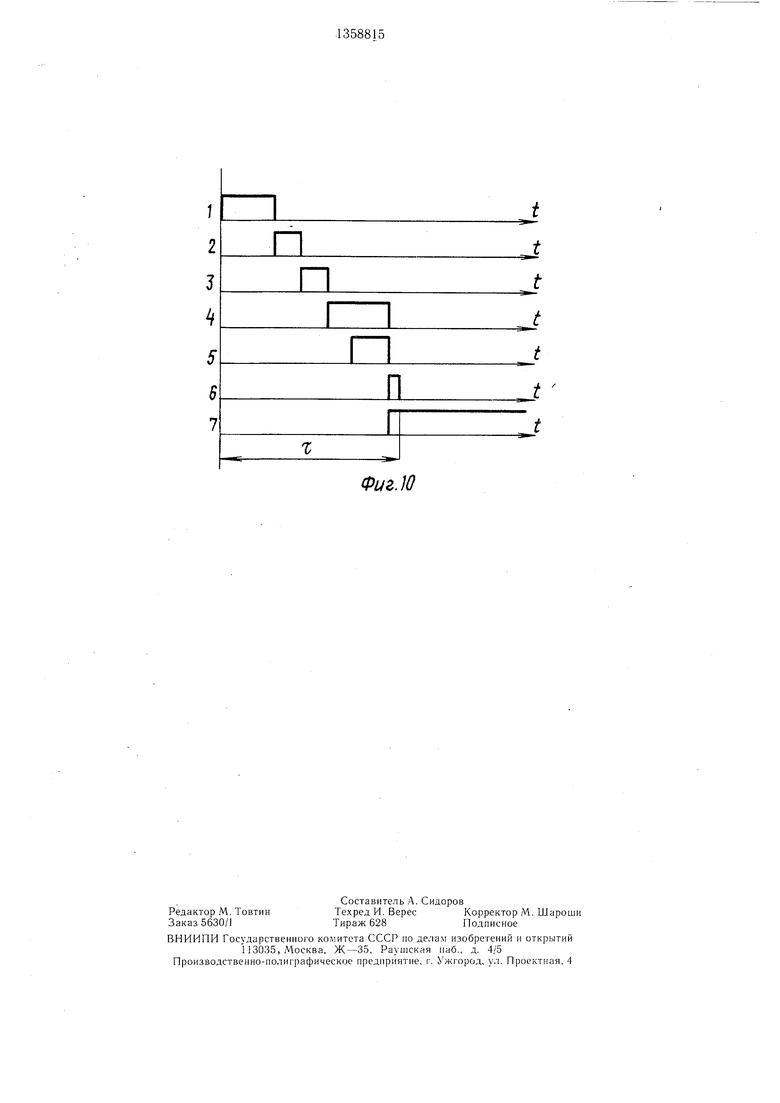
На фиг. 10 показана временная диаграмма работы механизмов устройства, где по осям абсцисс отложено время t, а по оси ординат - моменты 1...7 включения и выключения узлов и механизмов устройства.
Устройство для дообрезки ботвы высоко выступающих кад почвой кормовых корнеплодов функционирует следующим образом. Во время движения вдоль рядка корнеплодов свеклы справа налево (фиг. Г) полозок 1 копира при отсутствии корнеплодов .находится над почвой на высоте ho (3...4 см) и почвы не касается. Встретив на пути головку корнеплода 11, полозок 1 совместно с поводком 2 поднимается вертикально вверх с небольшим давлением па корнеплод, благодаря незначительной массе и элементам качения 3. в которых перемещается поводок 2. За счет реечной передачи 4 вертикальное перемещение копира вызывает поворот кулачково-сегмептного контактора 5 на тот или иной угол, что обеспечивает размыкание соответствующих контактов 51 (фиг. 5) за счет кулачков 50, расположенных по разрядам 1, 2, 4, 8 двоичного кода (фиг. 6) и формирование двоичных чисел 0...15, соответствующих высоте выступающей над почвой части корнеплода.
По кабелю 31 (фиг. 1) сформированные в контакторе 5 четырехразрядные двоичные числа поступают в микропроцессорное устройство 6, сюда же поступают тактовые сигналы от кулачково-барабанного контактора 7, приводимого цепной передачей 8 от мерного колеса 9.
На функциональной схеме микропроцессорных элементов (фиг. 4) импульсы, соответствующие вып1еуказанным двоичным числам,- получаются за счет микровык, 1ючате- лей Si...S4. Тактирующие импульсы, поступающие на вход Са микросхем Д1...Ди;, образуются за счет замыкания микрОЕ5ыключа- телей Ss и Ss кулачково-барабанным контактором, причем нечетные и четные номера
условно показанной кнопке 30 (фиг. 1). На45 микросхем попеременно через резисторы
выходе микросхемы Д|9 подключен усилительRs и Re соединяются с массой, т.е. при замысобранный на транзисторах Уз-V4, аналогич кании микровыключателя Ss двоичное число,
ный усилителю фиг. 4, выход с усилителяимеющееся на входах микросхема Ди поподведеп с помощью кабеля к обмоткеступают на вход микросхемы Да, а то, что
электромагнита 23.было на входе микросхемы Дз, -- на вход
Электромагнит 22 соединен с кнопкой 1650 микросхемы Д4 и т. д., а с микросхемы Д15
управления (фиг. 1) и контактом 55 кулачково-барабанного контактора 7 (фиг. 7) кабелями 35 и 36 через RS-триггер Та, аналогичный выщеописанному, на фиг. 9 в скобках отмечены соответствующие контакты управления Sa и Sas. Кабель 36 (фиг. 1), идущий от кулачково-барабанного контактора 7 к электромагниту 23 до подвода к
55
поступает па ее выходы 1, 2, 4, « и соответственно вход Д1...Д4 микросхемы Дн;. При замыкании контакта Se содержимое входа микросхемы Да поступает на вход Дз, с входа Д4 на вход Дз и т.д.
Новые значения высоты головок корнеплодов непрерывно поступают на вход микросхемы Д| и за счет тактирующих импуль15
20
5 Q
25
30
35
40
триггеру Та, проходит через постоянно разомкнутый контакт блока 28.
Роторный нож 10 (фиг. 1) удален от полозка-щупа 1 па расстояние Е, которое несколько больще диаметра выступающей над почвой .части самого мощного корнеплода.
На фиг. 10 показана временная диаграмма работы механизмов устройства, где по осям абсцисс отложено время t, а по оси ординат - моменты 1...7 включения и выключения узлов и механизмов устройства.
Устройство для дообрезки ботвы высоко выступающих кад почвой кормовых корнеплодов функционирует следующим образом. Во время движения вдоль рядка корнеплодов свеклы справа налево (фиг. Г) полозок 1 копира при отсутствии корнеплодов .находится над почвой на высоте ho (3...4 см) и почвы не касается. Встретив на пути головку корнеплода 11, полозок 1 совместно с поводком 2 поднимается вертикально вверх с небольшим давлением па корнеплод, благодаря незначительной массе и элементам качения 3. в которых перемещается поводок 2. За счет реечной передачи 4 вертикальное перемещение копира вызывает поворот кулачково-сегмептного контактора 5 на тот или иной угол, что обеспечивает размыкание соответствующих контактов 51 (фиг. 5) за счет кулачков 50, расположенных по разрядам 1, 2, 4, 8 двоичного кода (фиг. 6) и формирование двоичных чисел 0...15, соответствующих высоте выступающей над почвой части корнеплода.
По кабелю 31 (фиг. 1) сформированные в контакторе 5 четырехразрядные двоичные числа поступают в микропроцессорное устройство 6, сюда же поступают тактовые сигналы от кулачково-барабанного контактора 7, приводимого цепной передачей 8 от мерного колеса 9.
На функциональной схеме микропроцессорных элементов (фиг. 4) импульсы, соответствующие вып1еуказанным двоичным числам,- получаются за счет микровык, 1ючате- лей Si...S4. Тактирующие импульсы, поступающие на вход Са микросхем Д1...Ди;, образуются за счет замыкания микрОЕ5ыключа- телей Ss и Ss кулачково-барабанным контактором, причем нечетные и четные номера
микросхемы Д4 и т. д., а с микросхемы Д15
поступает па ее выходы 1, 2, 4, « и соответственно вход Д1...Д4 микросхемы Дн;. При замыкании контакта Se содержимое входа микросхемы Да поступает на вход Дз, с входа Д4 на вход Дз и т.д.
Новые значения высоты головок корнеплодов непрерывно поступают на вход мик росхемы Д| и за счет тактирующих импульсов через расстояние 1 (фиг. 1) поступают на выход микросхемы Д16 (фиг. 4), а также на вход 1, 2, 4, 8 микросхемы Д17, где четырехразрядные двоичные числа преобразуются в десятичные 0...15. Управление микросхе- .мо|| Ai7 осуществляется через инверсный вход Wo. через микровыключатель ST, при замыкании которого дешифратор Д: находится во вклJpчeннoм состоянии и на одном из выходов Fo...Fi5 будет «О, а на выходе микросхемы Д|8 - «1, которая включает через транзисторный усилитель Vi-V2 обмот ку 39 (фиг. 2) соотвётствуюш,его элеКтро- .магнита 24 (фиг. 1) управления высотой ножа 10.
15
тив часовой стрелки фрикционный ролик 19 к стойке 12, которая вместе с ножом 10 перемеш,ается вверх до касания поводком 15 двуплечего рычага 46, который замыкает микровыключатели 16 и 17, соединенные с соответствующими RS-триггерами. При дальнейшем движении стойки 12 вверХ благодаря небольшому перекрытию 6 и острым кромкам рычага 46 и поводка 15 рычаг выходит из зацепления с поводком и за счет пружины 47 занимает нейтральное положение, а контакты 16 и 17 (фиг. 1) размыка- Ются. Триггеры Т) и Т2 сохраняют полученное ими состояние, т.е. после импульсного включения контакта 16 электромагнит 23 находится под напряжением, пластина 18 стойки 12 притягивается к якорю электромагнита 23 и нож 10 оказывается в транспортном положении (примерно 300...350 .мм) и находится в таком положении, пока не сработает один из микровыключателей 30
кает один из контактов S9...S26 управления RS-триггером Ti (фиг. 9), опрокидывает его в нулевое состояние, что приводит к прекраЧерез транзистор Va и соответственно обмотку 39 (фиг. 2) электромагнита проходит ток до ЗА напряжением до 12В, что заставляет якорь 40 (фиг. 2) почти .мгновенно втянуться внутрь обмотки электромагнита
и при помощи штифта 41 вдвинуть палец 43 20 ОДаст через триггер Т, импульс на прекра- в отверстия пластин станины 25. По окон-щение подачи тока в обмотку электромагчании втягивания якоря 40 упор 29 замы- а 23. Кратковременное срабатывание
микровыключателя 17 приводит через триггер Т2 к прекрашению подачи тока в электромагнит 22 и за счет пружины (не показана)
щению подачи тока в электромагнит 23 25 фрикционный ролик отходит на расстояние (фиг. 1) удержания ножа в верхнем положении (транспортном).
Как только прекращается подача тока в электромагнит 23, нож 10 вместе со стойкой 12 под действием силы тяжести перемешается вниз до упора поводка 14 в палец 43 (фиг. 2). За счет сжатия упругого элемента 27 (фиг. 1) станина 25 смещается на расстояние 1-2 мм вниз в направляющих 26 и размыкает в блоке .микровыключателей 28 контакт S (фиг. 4), что приводит де- и:ифратор Д)- в нерабочее состояние, на выходе микросхемы Д18 появляется «О и подача тока в обмотку 39 (фиг. 2) электромагнита 24 (фиг. 1) преращается. Однако
палец 43 (фиг. 2) продолжает находиться в отверстиях пластин станины 25 за счет при- 40 жатия его поводком 14, прикрепленным к стойке 12 (фиг. 1) в нижней части которой в подшипнике вращается нож 10.
Постоянно вращающийся нож 10, опустившись до высоты выступания головки кор2-3 мм от стойки 12.
ijKaK только стойка 12 начинает подниматься за счет (фрикционного ролика 19 вверх за счет упругого элемента 27, станину 25 приподнимается, нижний контакт
30 28 размыкается, а верхний замыкается, что приводит дешифратор Д|7 (фиг. 4) в рабочее состояние. Освободившийся от воздействия поводка 14 палец 43 (фиг. 2) за счет пружины 44 выходит из промежутка пластин станины 25, подвижный упор 29
35 отходит от микровыключателя 30 (фиг. 1), который размыкается.
Для включения в работу электромагнита 22 необходимо, чтобы поводок 14 стойки 12 при опускании ножа 10 в рабочее положение переместил вниз станину 25, деформировал упругий элемент 27 и замкнул контакты в блоке 28 на линии 36, после чего за счет срабатывания кулачково-барабанно- го контактора 7 подается соответствующий импульс в триггер 1z и включается подача
неплода 11, своими лезвиями срезает остатки 45 тока в электромагнит 22 подъема ножа 10 ботвы и отбрасывает их в сторону. Через два такта кулачково-барабанного контактора 7 (может быть и другое число тактов), которое зависит от ширины лезвий ножа, (расстояние Е. и его разбивки на такты) за счет замыкания соответствующих контактов 55 (фиг. 7), обозначенных на фиг. 9 через S28, триггер Т2 устанавливается в единичное состояние и через транзисторный усилитель УЗ-V.1 подается ток в обмотку электромагнита 22 (фиг. 1), который притягивает пластину 21, поворачивает коромысло 20 вокруг неподвижной оси по часовой стрелке и прижимает постоянно вращающийся пров транспортное положение.
При отсутствии корнеплодов копир находится в нижнем положении и соединенный с ним кинематически кулачково-сег- ментный контактор выдает в дещифратор 50 МН нулевые сигналы, которые в дальнейшем не используются, поэтому в дешифраторе не задействован вывод FO, Нож в этом случае находится в транспортном положении, не касается почвы, что увеличивает его срок службы и исключает механические поломки.
Взаимодействие узлов и .механизмов устройства можно проследить по временной
55
5
тив часовой стрелки фрикционный ролик 19 к стойке 12, которая вместе с ножом 10 перемеш,ается вверх до касания поводком 15 двуплечего рычага 46, который замыкает микровыключатели 16 и 17, соединенные с соответствующими RS-триггерами. При дальнейшем движении стойки 12 вверХ благодаря небольшому перекрытию 6 и острым кромкам рычага 46 и поводка 15 рычаг выходит из зацепления с поводком и за счет пружины 47 занимает нейтральное положение, а контакты 16 и 17 (фиг. 1) размыка- Ются. Триггеры Т) и Т2 сохраняют полученное ими состояние, т.е. после импульсного включения контакта 16 электромагнит 23 находится под напряжением, пластина 18 стойки 12 притягивается к якорю электромагнита 23 и нож 10 оказывается в транспортном положении (примерно 300...350 .мм) и находится в таком положении, пока не сработает один из микровыключателей 30
0 ОДаст через триггер Т, импульс на прекра- щение подачи тока в обмотку электромагфрикционный ролик отходит на расстояние
2-3 мм от стойки 12.
ijKaK только стойка 12 начинает подниматься за счет (фрикционного ролика 19 вверх за счет упругого элемента 27, станину 25 приподнимается, нижний контакт
28 размыкается, а верхний замыкается, что приводит дешифратор Д|7 (фиг. 4) в рабочее состояние. Освободившийся от воздействия поводка 14 палец 43 (фиг. 2) за счет пружины 44 выходит из промежутка пластин станины 25, подвижный упор 29
отходит от микровыключателя 30 (фиг. 1), который размыкается.
Для включения в работу электромагнита 22 необходимо, чтобы поводок 14 стойки 12 при опускании ножа 10 в рабочее положение переместил вниз станину 25, деформировал упругий элемент 27 и замкнул контакты в блоке 28 на линии 36, после чего за счет срабатывания кулачково-барабанно- го контактора 7 подается соответствующий импульс в триггер 1z и включается подача
тока в электромагнит 22 подъема ножа 10
в транспортное положение.
При отсутствии корнеплодов копир находится в нижнем положении и соединенный с ним кинематически кулачково-сег- ментный контактор выдает в дещифратор МН нулевые сигналы, которые в дальнейшем не используются, поэтому в дешифраторе не задействован вывод FO, Нож в этом случае находится в транспортном положении, не касается почвы, что увеличивает его срок службы и исключает механические поломки.
Взаимодействие узлов и .механизмов устройства можно проследить по временной
диаграмме (фиг. 10). Цифрой 1 обозначено вре.мя начала и конца срабатывания электромагнита 24 (фиг. 1), когда в его обмотку поступает ток через усилитель, соединенный с дешифратором Д|7 микропроцессора 6 (фиг. 4), цифрой 2 - время подач-и сигнала на триггер Ti для отключения магнита 23 удержания ножа в вер.хнем положении, цифрой 3 - время опускания ножа в нижнее (рабочее) положение, перемещения станины 25 вниз и срабатывания блока контактов 28; цифрой 4 - время подъема ножа в верхнее положение за счет срабатывания элек,- тромагнита 22 и прижатия фрикционного ролика 19 к стойке 12; цифрой 5 - вре.мя возвращения пальца 43 (фиг. 2) за счет пружины 44 в ис.ходное состояние; цифрой
Т.
на триггер
6 - время подачи сигнала .для отключения магнита 22 (фиг. 1); цифрой 7 - подача сигнала на триггер Т| для
включения магнита 23 в рабочее состояние, т.е. для удержания ножа 10 в верхнем (транспортном) положении. Общее время цикла обозначено через т, приче.м т составляет сотые доли секунды.
Формула изобретения
1. Устройство для дообрезки ботвы высоко выступающих над почвой кормовых корнеплодов, содержащее размещенные на раме копир, установленный на стойке, име- юцдей приспособление для перемещения по вертикали, активный нож, кулачково-сег- ментный и связанный с мерным колесом барабануый контактор, а также микропро- цессорнЬ е устройство для обеспечения функционирования ножа по задаваемой копиром
0
5
0
программе, отличающееся тем, что, с целью повь щения производительности и качества удаления остатков ботвы высоко выступа- 1ЮЩИХ над почвой кормовых корнеплодов, активный нож выполнен в виде ротора с горизонтальной, совпадающей с направлением перемещения мащины осью вращения, приспособление для перемещения стойки но вертикали выполнено в виде имеющего возможность взаимодействия с ней постоянно вращающегося фрикционного ролика, установленного на одном конце коромысла, против другого конца которого размещен электромагнит для управления перемещением стойки причем устройство снабжено дополнительным электромагнитом для фиксации стойки при отсутствии корнеплодов в крайнем верхнем положении, RS-триггерамн, связанными с электромагнитами для управления перемещения стойки и ее фиксации, а также соединенным с рамой посредством упругого элемента блоком регулирования высоты положения ножа,
2. Устройство по н. 1, отличающееся тем, что блок регулирования высоты положения ножа выполнен в виде двух пластин с вертикальными рядами отверстий, с которыми связаны щтифты-нальцы, соединенные с якорями электромагнитов регулировагшя положения ножа для установки заданной среза.
ЗлУстройство по п. 1, отличающееся тем. что Микропроцессорное устройство снабжено дещифратором двоичного кода в десятичный с серией транзисторных усилителей, соединенных с обмотками электромагнитов регулирования положения ножа для установки заданной высоты среза.
2 1 2 /V 25
Фаг. 5
1 2 S
15 /3
;;
9 7
5
5
50 -50
-50
50
50
Фиг. 5
,5В-i 5%
Фиг.7
Ss Sfi $2
Фиг. 8
J-Г
5 (S27;
5;i
Hzo
128
+
23
L.
Sl (S,)
1 a
P//2.5
n
n
I I
П
J
. Ю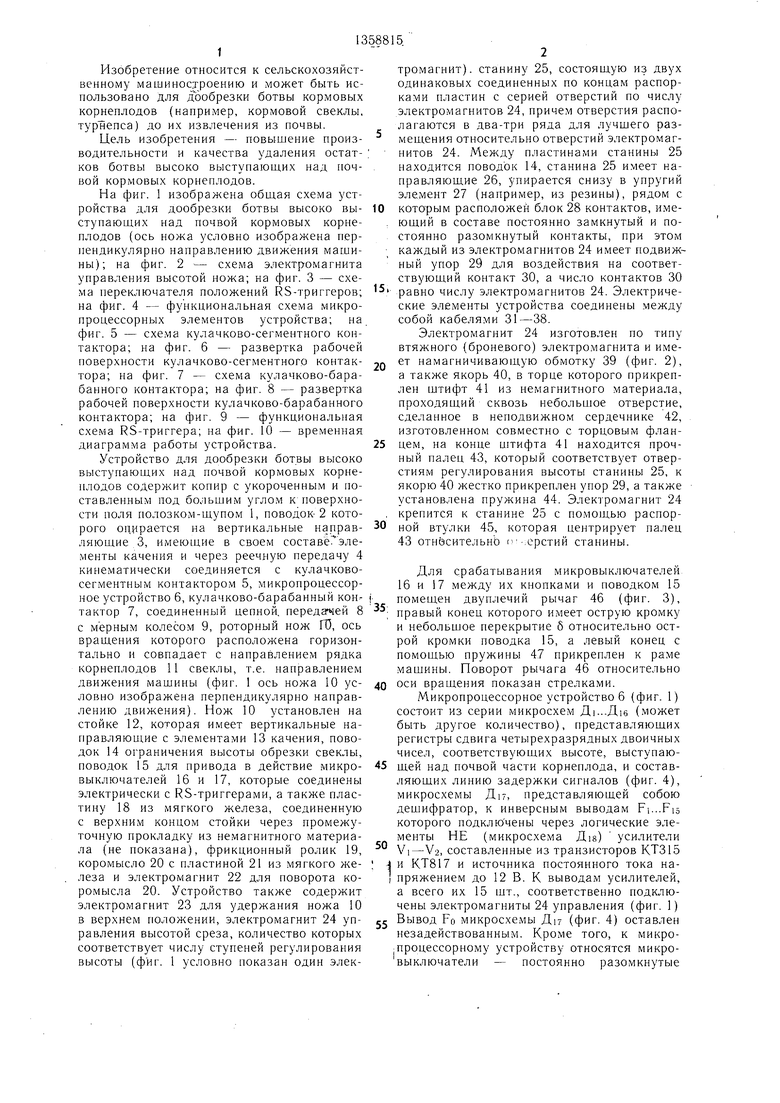
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для копирования свекловичных головок и дообрезки ботвы корнеплодов сахарной свеклы | 1986 |
|
SU1396990A1 |
| Устройство для копирования свекловичных головок и дообрезки ботвы | 1989 |
|
SU1711705A1 |
| Копирующее устройство ботвосрезающих аппаратов корнеклубнеуборочных машин | 1986 |
|
SU1342447A1 |
| КОМБАЙН ДЛЯ УБОРКИ КОРНЕПЛОДОВ | 1992 |
|
RU2060622C1 |
| Устройство для разделения компонентов картофельного вороха | 1985 |
|
SU1358818A1 |
| Способ уборки ботвы корнеплодов и устройство для его осуществления | 1978 |
|
SU933037A1 |
| Устройство для дообрезки головок корнеплодов | 2021 |
|
RU2785452C1 |
| Устройство для автоматической установки ножа на высоту среза ботвы | 1985 |
|
SU1253469A2 |
| Конирующее устройство ботвосрезающих аппаратов корнеклубнеуборочных машин | 1982 |
|
SU1071249A1 |
| Устройство для разделения компонентов картофельного вороха | 1990 |
|
SU1724069A1 |
Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является иовьинение производительности и качества удалегчя остатков ботвы высоко выстунающих над почвой кормовых корнеп.тодов. Отделение остатков ботвы корнеплодов 1 1 осунаествляется за счет роторного ножа 10, ось вращения которого расположена горизонтально и совнадает с направлением движения машины. При отсутствии корнеплодов 11 нож 10 находится с транспортным зазором от поверхности почвы. По сигналу микропроцессорного устройства 6 по задаваемой ноставленным под большим уг. юм к поверхности поля копирующим шупом 1 программе нож 10 опускается. Щуп 1 создает на головки корнеплодов 11 незначите, 1ьное давление и не выворачивает их из почвы. После обреза- ния ботвы нож 10 снова возвращается в транспортное положение за счет фрикционного ролика 19. Управ, 1ение высотой ножа 10 отн 1сительно корнеплодов 11 ос чцест- вляется штифт ми-пальпа.ми, перекрывающими ряд отверстий в стапине 25 и срабатывающими за счет серии втя,:пых электромагнитов 24, соединенных через усилители с дешифратором микроироцессорпого устройства. 2 з.п. ф-лы, 10 ил. (Л CZ со СП 00 00 сл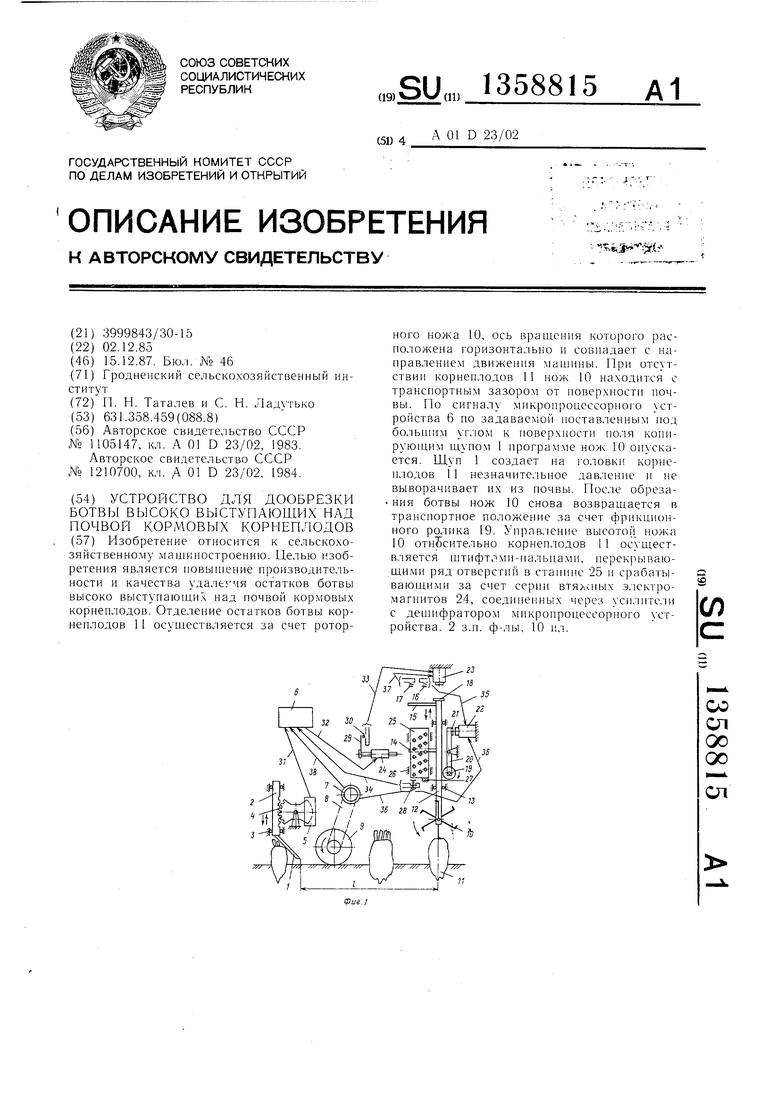
| Устройство для автоматической установки ножа на высоту среза ботвы | 1983 |
|
SU1105147A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для копирования свекловичных головок и дообрезки ботвы сахарной свеклы | 1984 |
|
SU1210700A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
