Изобретение относится к измерительной технике и может быть использовано для компенсации TeNffleparypnoft погрешности тензорезисторных датчиков силы, давления, деформации.
Цель изобретения - повышение точности температурной компенсации.
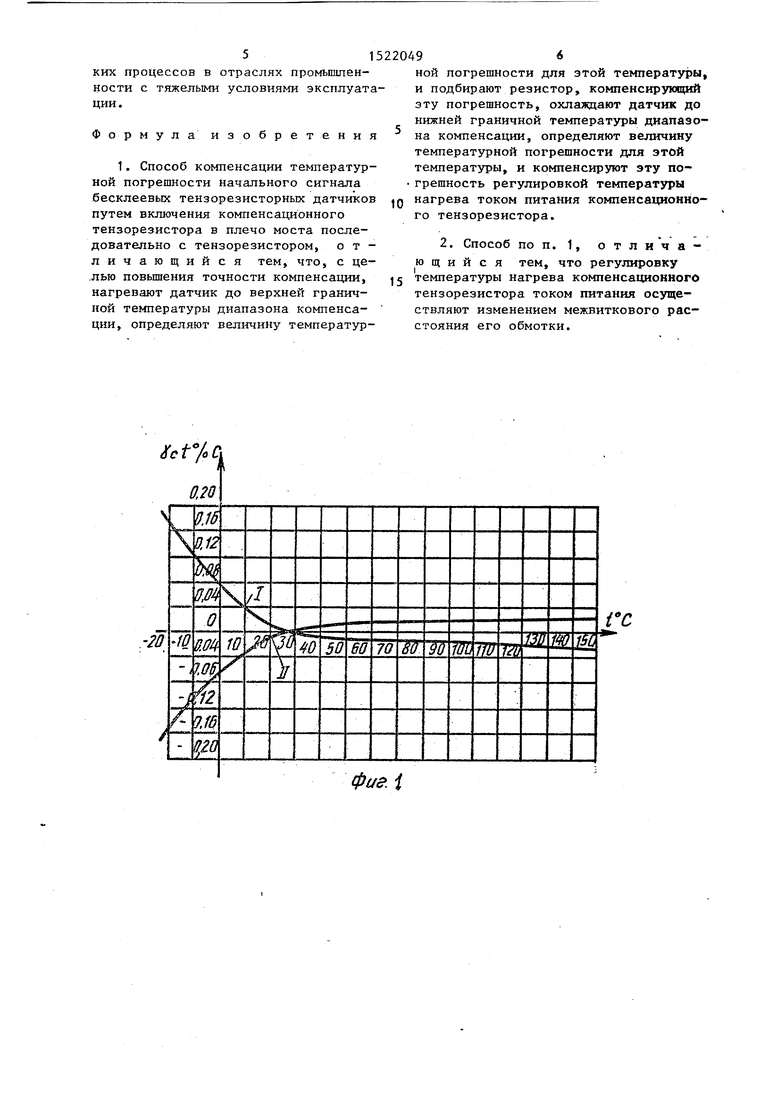
На фиг, 1 показана зависимость токовой составляющей погрешности дат- чика от тe mepaтypы; на фиг. 2 - зависимость температурной погрешности датчика от температзт ы; на фиг. 3 - конструкция датчика; на фиг. 4 - электрическая схема датчика.
Способ температурной компенсации начального сигнала реализуется в датчике с бесклеевыми тензорезистора- ми следующим образом.
На упругом элементе 1 датчика в виде круглой пластины со стойками, опирающимися на шариковую опору 2, размещены рабочие тензорезисторы 3 в виде двух обмоток из константановой проволоки, на специальном недефор- мируемом каркасе 4 размещены компенсационные тензорезисторы 5 в виде двух таких же обмоток. На подгоночной плате 6 размещаются подгоночные резисторы, в том числе .резистор 7 для компенсации TeNmepaTypHo погрешности начального сигнала,
Диапазон рабочих температзгр датчика - 150°С, номинальное значение приращения выходного сигнала при максимальной нагрузке (и„ - UQ) 24 мВ сопротивление тензорезистора R S S 200 Ом, Датчик помещают/в камеру тепла и подключают напряжение питания датчика 24 В. Сначала измеряют ,
начальный сигнал датчика при нормальной температуре (20°С), U - 1, мВ. Повьш1ают температзфу в камере до 150°С и .вьщерживают датчик при этой температуре 2-4 ч. После выдержзси измеряют начальный сигнал датчика . Ujj при температуре 150°С, +1,8 мВ, Определяют теьщературную погрешность начального сигнала при этой температуре
Jot ш;%)
Величину сопротивления компенсирующего резистора определяют по фор 55 муле:.
. 0,039 (ОН). ., oi UnuT . /2)
д 5
0 5 О
5
0
45
0
5
где t - разность температур. С; oi - температурный коэффициент сопротивления меди, (рС 0,0039 / ); и выходной сигнал датчика при
номинальной нагрузке, мВ; Up - начальный выходной сигнал при
нормальной температзфе, мВ; пит напряжение питания, В; R - сопротивление тензорезистора
(плеча тензомоста). Поскольку значение погрешности положительно, компенсирующий резистор R впаивают последовательно с компенсационным тензорезистором, как показано на фиг, 4, где R, 2 Р бочие тензорезисторы; Rj, R - компенсационные тензорезисторы.
После компенсации температурной погрешности начального сигнала.при +150 С датчик помещшот в камеру холода и измеряют начальный сигнал при нормальной температуре (+20°С).
Температуру в камере понижают до нижней граничной температуры диапазона 5°G и после вьщержки в течение 2-4 ч измеряют начальный сигнал при этой тe fflepaтype, По формуле (1) определяют погрешность t при 5 С. Затем температуру в камере доводят до нормальной, вьщерживают датчик при нормальной температуре 4-8 ч и вынимают его из камеры с,
Предположим, что погрекшость при +5°С больше допустимой и равна +05017%/°С. Тогда для компенсации этой погрешности витки компенсационных тензорезисторов сдвигают заточенной палочкой из непроводящего ток материала, одновременно измеряя начальный выходной сигнал. ,Цля компенсации погрешности +0,017%/ С необходимо витки компенсационных тензорезисторов сдвинуть так, чтобы при зтом начальный сигнал изменился на 3,4% от 24 мВ, т,е, на 0,816 мВ.
Если погрешность имеет отрицательное значение, витки компенсационного тензорезистора раздвигаются до такого же изменения начального сигнала.
Использование предлагаемого способа температурной компенсации начального сигнала позволяет существенно расширить рабочий температурный диапазон тензорезисторных датчиков без применения специальных материалов для тензорезисторов и применять дат- 4ijKH для автоматизации технологических процессов в отраслях промьшшен- ности с тяжельпчи условиями эксплуатации.
Формула изобретения
1. Способ компенсации температурной погрешности начального сигнала бесклеевых тензорезисторных датчиков путем включения компенсационного тензорезистора в плечо моста последовательно с тензорезистором, отличающийся тем, что, с це- .лью повышения точности компенсации, нагревают датчик до верхней граничной температуры диапазона компенсации, определяют величину температурной погрешности для этой температуры, и подбирают резистор, компенсирующий эту погрешность, охлаждают датчик до нижней граничной температуры диапазона компенсации, определяют величину температурной погрешности для этой температуры, и компенсируют эту по- грешность регулировкой температуры нагрева током питания компенсационного тензорезистора.
2. Способ по п. 1, отличающийся тем, что регулировку температуры нагрева компенсационного тензорезистора током питания осуществляют изменением межвиткового расстояния его обмотки.

Изобретение относится к измерительной технике и используется для компенсации температурной погрешности тензорезисторных датчиков силы, давления и т.п. Целью изобретения является повышение точности компенсации. Указанная цель достигается тем, что перед включением компенсационного тензорезистора 5 последовательно с тензорезистором 3 подбирают тензорезистор 5, компенсирующий эту погрешность, охлаждает датчик до нижней граничной температуры диапазона компенсации, определяет величину температурной погрешности для этой температуры и компенсирует эту погрешность регулировкой температуры нагрева током питания компенсационного тензорезистора 5. Регулировку температуры нагрева этого тензорезистора 5 осуществляют изменением межвиткового расстояния его обмотки. 1 з.п. ф-лы, 4 ил.
Xct%C 0.20
1
20
Шом
10
т
Ш
т
фае. i
«0- Уп1//77
.Z
| Печук В.И | |||
| и др | |||
| Контроль усилий бесклеевыми тензорезисторными датчиками | |||
| - Киев, 1971 | |||
| Игнатов А.В | |||
| и др | |||
| Исследование влияния температуры на характеристики тензометрического динамометра | |||
| - Измерительная техника, № 8, 1977. |
